基于侧滑配平的单副翼极限位置卡死控制方法研究
2014-03-25吴成富邵朋院戢凤
吴成富, 邵朋院, 戢凤
(西北工业大学 无人机特种技术重点实验室, 陕西 西安 710065)
舵面卡死是无人机一种常见故障,该故障会对无人机飞行的安全性和操纵性产生不利影响。文献[1]指出,在单侧副翼卡死情况下,飞机很容易进入荷兰滚模态,严重影响飞机的飞行安全。该文献还从力矩平衡的角度得出了单侧副翼卡死在什么范围内时,可以利用其他操纵面来进行补偿。该文献的分析结果对单副翼有限卡死情况下进行容错控制的可能性提供了理论依据。
针对舵面故障的控制,国内外很多研究者进行了相关研究,取得了不少研究成果,例如文献[2-4]。可以看出,上述文献中的研究集中于舵面卡死在有限位置的情况,其中给出的单侧舵面卡死的最大幅值分别为11.46°[2]、2.29°[3]和1.43°[4],这距离一般飞机操纵面的极限位置还有很大幅度(一般飞机的操纵面极限位置均在20°~30°),同时注意到,上述文献采用的补偿方法均为使用剩余操纵面来对卡死舵面进行补偿。所以,使用上述文献中的方法,无法处理操纵面极限位置卡死的故障。
而操纵面极限位置卡死在飞机舵面故障中时有发生,但对于该问题,在作者查阅到的文献范围内,还没有研究者给出解决方法,不过科林斯公司的D B.Jourdan等人在容损控制方案[5]中提出的全姿态控制器(all attitude autopilot)可以为该问题的解决提供一定思路。全姿态控制器(后文中缩写为AAA)设计初衷是用于飞机在进行大姿态机动的一种控制方法,该方法的核心思想是将整个飞机作为一个操纵面,利用气流角(迎角和侧滑角)产生额外的操纵力矩,弥补在某些极端情况下舵面操纵能力不够的限制,文献[5]利用AAA实现了在单侧机翼翼面矩损伤80%的情况下继续稳定飞行,并进行了试飞验证,证明了AAA在飞机舵面操纵能力不足情况下巨大的应用价值。
本文提出了一种基于AAA思想的容错控制方案,当飞机单侧副翼极限位置卡死时,使飞机产生侧滑角,来提供额外的滚转力矩,以补偿副翼卡死带来的不对称力矩。仿真结果表明,该方法可以使飞机的滚转姿态快速稳定下来,并逐渐恢复未卡死副翼的操纵能力,从而避免由于副翼极端位置卡死而造成的事故。
1 单侧副翼卡死飞机的配平分析
从文献[1]的分析结果可以看出单侧副翼卡死对于横侧向力矩(滚转力矩和偏航力矩)影响较大。其中,对于滚转力矩的影响最大,而且单侧副翼卡死
使得滚转力矩的配平能力大幅降低,所以配平的关键是如何配平滚转力矩。
从前文可知,要实现单侧副翼极限位置卡死的配平,只使用剩余舵面的操纵能力是远远不够的。所以,需要充分挖掘飞机的滚转操纵能力,可以从飞机的滚转力矩系数组成来进行分析。
飞机的滚转力矩系数表达式如下:
cl=clββ+clδαrδαr0+clδrδr+clδalδαl+clpp
(1)
式中:cl为滚转力矩系数;β为侧滑角;δαl为左副翼;δαr0为右副翼卡死位置;cl*为滚转力矩对各个量的气动导数。
从(1)式可以看出,除了舵面可以产生滚转力矩外,侧滑角也可以产生滚转力矩,所以,可以使用侧滑角对单侧副翼卡死后的飞机进行滚转力矩配平。下面分析引入侧滑角配平的优缺点。
从(1)式可知,当加入侧滑角时,能够减小其他舵面的配平量,特别是减小左副翼的配平量,能够增加飞机剩余的操纵能力。
图1为以某小型无人机为例,对于右副翼在极限位置(20°)的情况进行水平直飞配平,

图1 右副翼极限位置卡死配平曲线
从图1可以看出,若不加入侧滑角,则左副翼也得偏转到极限位置(20°),才能实现水平直飞,随着侧滑角的加入,左副翼偏度逐渐减小,加入-10°侧滑时,左副翼偏度减小了4.12°,但同时滚转角增加了11.15°。
从上面理论分析和实际配平的结果可以看出,在配平中增加侧滑角和左副翼各有利弊:
·增加侧滑角可以使飞机具有较大的剩余操纵能力,但会增加飞机的滚转角,同时会增大阻力。
·增加左副翼可以减小飞机的侧滑和滚转,但是会减小剩余操纵能力。
2 舵面卡死控制器设计
2.1 控制器结构
控制器的主要目的是产生合理的侧滑角指令并对其进行控制。
飞行控制律设计仍然采用纵向和横侧向模态分开设计的方法,其中,纵向采用高度保持控制律,使飞机可以实现定高飞行,横侧向采用侧滑角保持控制律。其中,高度保持控制律与正常飞机的类似,采用俯仰角保持作为内回路,设计方法和结果在此不再赘述。
横侧向控制器由两部分组成,一部分为侧滑角指令生成器,用于监控飞机舵面状态,生成侧滑角指令;另一部分为侧滑角控制器,用于实现指令生成器生成的侧滑角指令。
整个控制器结构如图2所示。

图2 控制器结构总框图
图2中背景有斜线的模块即为横侧向控制器,为本文中重点研究的内容。
2.2 侧滑角控制器设计
侧滑角导数如下式所述:
(2)
从(2)式可知,偏航角速率、滚转角速率以及侧向力都对侧滑角的建立有贡献,而前2个角速率需要使用副翼和方向舵来产生,而侧滑角建立起之后,会产生侧力,需要建立滚转角,通过升力分量来平衡该侧滑角。所以,侧滑角采用副翼和方向舵协调控制的方法,使用滚转角和偏航角控制作为内回路。
控制器结构如图3所示。
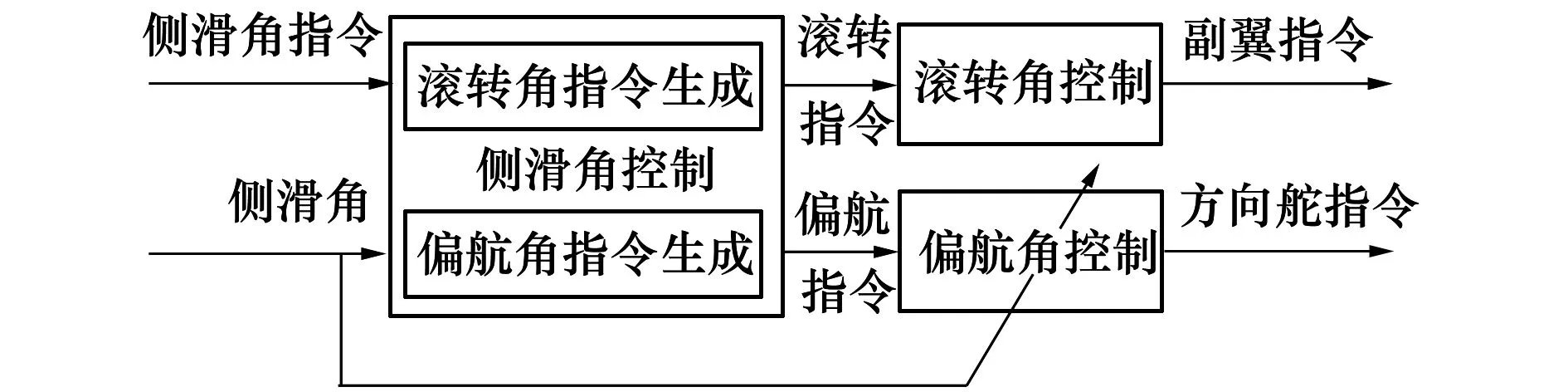
图3 侧滑角保持控制器框图
侧滑角保持控制器由内环姿态控制和外环的姿态指令生成(即图3中的侧滑角控制)组成,其中外环由侧滑角偏差来生成滚转和偏航指令,内环分别使用副翼和方向舵来实现姿态角的控制,需要注意的是其中偏航角控制与常规的偏航角控制不同,其主要目的并不是控制偏航角,而是使用方向舵来配合产生侧滑角,并使侧滑角到达稳态时航向达到稳态,实现稳态侧滑直飞。图3中各个控制器都采用经典的PID控制律,其中在参数设计过程中,发现偏航角控制的参数随侧滑角变化较大,所以,偏航角采用增益调度PID控制。
其中,侧滑角控制器根据侧滑角误差来生成滚转指令和偏航指令,使用PI控制,控制律如下:
(3)
滚转角保持使用PD控制,控制律如下所示:
δa=Kpa*(φc-φ)-Kda*p
(4)
偏航角保持使用PD控制,控制律如下所示:
δr=Kpr*(ψc-ψ)-Kdr*r
(5)
从图1可知,在右副翼极限卡死时,要给左副翼留出一定的操纵余量,需要加入较大的侧滑角(要留4°操纵余量时侧滑角打到10°),而在侧滑角变化过程中,飞机横航向气动特性变化较大,控制律设计时分别选取侧滑角为0、-3、-6、-9°稳定侧滑直飞状态4个设计点,使用传统频域校正方法调整参数,在调参的同时观察其时域响应,使其满足给定的时域及频域指标,由于篇幅限制,设计结果省略。
作者在调参时发现,侧滑角为-9°时纵向及滚转角控制的参数均可以满足其他设计点的设计要求,而偏航通道的参数不能满足其他设计点的设计要求,需要根据侧滑角的值进行增益调度。
其中,增益调度采取指数过渡规则,在2个设计点之间的过渡规则如下:
(6)
式中:K0和Kf分别为距离当前工作点最近的2个设计点参数,τ∈[0,1]为指数过渡的比例系数,表示当前工作点在相邻2个设计点之间的归一化距离,计算公式如下:
(7)
式中:β0和βf分别为与K0和Kf对应的相邻2个设计点的侧滑角值。
2.3 自适应指令生成器设计
自适应指令生成器通过监控副翼位置来判断是否有副翼卡死,并在一片副翼卡死时,根据另一片副翼的状态给出适当的侧滑角指令,使得一片副翼卡死后,飞机横侧向运动能够快速稳定下来,并在快速稳定之后加入侧滑角使得另一片副翼能保留足够的操纵余量。为了简单可靠,该策略依然沿用成熟的PID控制形式。
设检测到右副翼卡死,则侧滑角指令生成策略如下所述:
(8)
式中:
(9)
式中:δal-lim为限定的性能恢复后左副翼的最大偏度,本文中结合所研究飞机的气动数据,取δal-lim=16°,即在性能恢复结束后,左副翼偏度不能大于16°,即左副翼必须留足不小于4°的操纵余量。
上述策略在处理舵面卡死时会有2个阶段:
·在右副翼刚卡死时,滚转角大幅增加,侧滑角指令为0°,为了保持该0°侧滑角,左副翼偏度迅速增大(在该模型中达到了极限位置20°),将飞机的滚转姿态稳定下来。该阶段为快速稳定阶段,在该阶段左副翼补偿起主要作用,但该阶段结束时,左副翼的剩余操纵能力几乎为0,所以需要第二阶段恢复左副翼的操纵能力。同时注意到,该阶段持续时间很短,所以对飞机飞行安全性影响不大。
·在左副翼超过16°之后,在(8)式的作用下,开始加入侧滑角,直至左副翼偏角回到16°以内,飞机最终进入一个稳定侧滑飞行状态。该阶段为操纵能力恢复阶段,主要作用是利用侧滑角使左副翼偏角减小,恢复副翼的滚转操纵能力。
从上述分析可以看出,使用上面的策略生成侧滑角,可以根据副翼的状态自动调整侧滑角指令,既能使飞机从单侧副翼卡死的情况下快速稳定下来,又能在稳定之后逐渐恢复飞机的操纵能力,所以上述策略是合理的。
通过在非线性模型中调整,发现KP和KI2个系数对指令生成和系统响应会产生如下影响:
·KP增大会提高指令生成和系统响应的快速性,但会使系统响应超调增加,同时会使稳态时的侧滑角指令降低,未卡死舵面的稳态值增加。
·KI增大会使稳态时的侧滑角指令增大,未卡死舵面的稳态值减小,但过大的KI会使系统震荡甚至失稳。
根据上述分析,响应的快速性和剩余操纵余量是一对矛盾,本文在保证稳态时线性系统稳定裕度的前提下,对快速性和剩余操纵余量采取加权最优准则,将指令生成器的参数调节问题归结为一个最优化问题,如下式所述:
(10)
(11)
注:(11)式中下标f表示寻优过程的响应终值。
使用非线性模型,在Matlab中的使用fminsearch函数,在空中飞行阶段,取λ1=0.4,λ2=0.6,求解最优化问题,得到一组最优解:
取该组解时稳定裕度为:
GM=10.096 696 dB
PM=80.006 087°
使用自适应指令生成器结合上述侧滑角保持控制律,非线性仿真结果见下节。
3 仿真结果及其分析
为了验证文中设计的自适应指令生成器和侧滑角保持控制器在非线性模型中的响应,进行非线性仿真。仿真初始阶段,飞机在500 m高度,以25 m/s空速保持水平直飞,在仿真5 s时,右副翼卡死在极限位置(20°),整个过程中自适应指令生成器都在工作。整个过程中各个量响应如下:

图4 副翼及侧滑角响应 图5 其他相关量响应
从上面各图可以看出,在5 s时右副翼开始卡死到极限位置(20°),滚转角迅速增大到-60°,高度下降近9 m,航向变化近50°,飞机有盘旋下降的趋势,在自适应指令生成器的作用下,左副翼也迅速出舵到极限位置,在2 s内使滚转角回到20°以内,同时高度开始上升;在滚转角和高度开始回归后,侧滑角指令逐渐增加,左副翼出舵量从极限值(20°)开始减小,最后减小到15°之内,侧滑角稳定在10°,同时滚转角和航向角以及高度都稳定下来,飞机保持一个固定的侧滑角水平直飞,整个过程在4 s内基本稳定下来。
4 结 论
本文通过引入侧滑角产生额外的滚转力矩,来进行飞机单侧副翼极限位置卡死时的容错控制。相比于现有的只能处理单侧副翼有限卡死的容错控制方案,该方法的容错能力大幅提高。本文设计的指令生成器和侧滑角控制律使用经典的PID控制结构,简单直观,易于调参和工程实现。仿真结果表明,本文提出的方案能使飞机在单侧副翼极限位置卡死后快速稳定下来,并逐渐恢复未卡死副翼的操纵能力。
参考文献:
[1] 王娜,席剑辉,黄宇,赵文成. 无人机单副翼有限卡死时荷兰滚运动分析[J]. 仪器仪表学报,2009,30(6):838-842
Wang Na, Xi Jianhui, Huang Yu, Zhao Wencheng. Analysis on Dutch Roll Modal of Unmanned Aerial Vehicle with the Limited Deadlocking of Single Aileron[J]. Chinese Journal of Scientific Instrument, 2009,30(6):838-842 (in Chinese)
[2] 张平,陈宗基. 飞机操纵面故障研究及其补偿重构[J]. 飞行力学,1997,15(3):67-72
Zhang Ping, Chen Zongji. Aircraft Failures Studies and Its Reconfigurable Control[J]. Flight Dynamics, 1997, 15(3):67-72 (in Chinese)
[3] Bajpai G. Reconfigurable Control of Aircraft Undergoing Sensor and Actuator Failure[D]. Drexel University, Philadelphia, 2002
[4] Thomas Suba, Kwatny Harry G, Chang Bor-Chin, et al. Regulator Design for Control Surface Failure Accommodation in an F-16[C]∥AIAA Guidance, Navigation, and Control Conference, 2005
[5] Jourdan D B, Piedmonte M D, Gavrilets V, et al. Enhancing UAV Survivability through Damage Tolerant Control[C]∥AIAA Guidance, Navigation, and Control Conference, 2010: 2-5
