激光波前相位测试与校准技术
2014-03-22胡绍云孟庆安蒋泽伟
刘 磊 胡绍云 孟庆安 张 浩 蒋泽伟
(1.安徽医科大学附属省立医院,合肥 23001;2.西南技术物理研究所,成都 610041)
0 引言
目前测量激光束波前相位的方法主要有两种,一种为波前传感器法,即利用经典Hartmann波前传感器、Hartmann-Shack波前传感器等测量激光束波前相位;另一种为剪切干涉法,即利用剪切干涉仪通过干涉原理测量激光束的波前相位。本文介绍了Hartmann-Shack波前传感器测量激光束波前相位的测试方法和测试原理。Hartmann-Shack波前传感器由一个微透镜阵列、CCD相机和数据采集处理系统三部分组成,可同时获得激光束的波前斜率和光束的近场强度分布,通过Zernike模式法或区域法重构可得到激光束的波前相位,广泛应用于自适应光学波前相位测量、激光光束质量测量和激光医学检测等工程领域。
Hartmann-Shack波前传感器可通过溯源至标准平面面形,然后将标准平面面形溯源至国家平面基准的方法实现校准。
1 测量原理
Hartmann-Shack波前传感器测量原理如图1所示。它主要由按一定规律排列的子透镜,即微透镜阵列、CCD和数据处理系统构成的。其基本原理是:待测光束经准直后作为参考光波,该参考光波通过微透镜阵列的每个子透镜,在CCD上形成一个与子透镜相对应的光斑阵列,将每个光斑的质心作为参考位置(基准)。当待测光束波前变化时,观察屏上每一光斑质心相对于各自质心的参考位置(基准)将有一位移。位置(i,j)的子透镜对应的光斑在x,y方向的位移分别为Δxij,Δyij,设子透镜与观察屏之间的距离为f,则子透镜上波前平均斜率gxij,gyij为
gxij=-Δxij/f
gyij=-Δyij/f
(1)
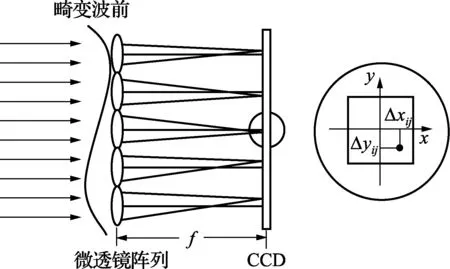
图1 哈特曼-夏克波前传感器原理示意图
求出畸变波前上被各阵列透镜分割的子透镜范围内波前的平均斜率,即可求得全孔径波前的光程差或相位分布。
用波前斜率这个信息,采用波前重构理论中的区域法或模式法就可以获得变形波像差。若以标准平面波为参考波,还可直接重构出光波前。
如何快速准确地测量透镜阵列焦面上的光斑质心坐标是Hartmann-Shack波前探测的核心问题,它直接影响到波前拟合的精度。常用的测定质心的方法有四象限法、CCD法等。下面主要介绍CCD法。
在微透镜阵列子孔径数增多的情况下,光电倍增管和四象限探测器之类的光敏组件用于波前探测,光敏组件将会变得越来越庞大而复杂,或由于灵敏度不能满足要求,而难以实际应用。随着高帧频低噪声的电荷耦合器件(CCD)和大容量高速度数字信号处理电路的发展,建立在他们基础上的探测器已广泛应用于多种传感器,包括Hartmann-Shack波前传感器。
根据光斑质心的定义可写出离散采样情况下的质心计算公式为
(2)
式中:xi,yi分别为CCD各单元(像素)中心点的坐标;Ii,j为第(i,j)个CCD单元接收的光能量;L,M分别为子孔径单元的长度和宽度值。
把CCD单元接收的光信号通过A/D转换后送入计算机,按式(2)就可算出各个子孔径光斑的质心坐标。
2 波前重构
一个完整的波前相位φ(x,y)的泽尼克正交多项式Zk展开为:
(3)
式中:D为泽尼克正交多项式矩阵;A为系数矩阵。式(3)是波前相位展开式的连续形式,实际的离散形式为:
(4)
再由波前斜率gx,gy与波前相位的关系,可得
(5)
式中:εx和εy为测量误差,由于波前传感器测量的是子孔径(i,j)内(对应面积为Si)的平均波前斜率,因此式(5)也应写成平均值形式:
(6)
(7)
式(6)、(7)用矩阵符号表示为
φ=DφAφ
(8)
G=DgAg+ε
(9)
式中:φ为m维向量;Dφ为n×m矩阵;Aφ为m维向量;G为2m维向量;Dg为2n×m维矩阵;Ag为2m维向量。

(10)
(11)

3 波前校准
3.1 校准方法
Hartmann-Shack波前传感器可通过一组标准平面溯源至国家平面基准,校准溯源图如图2所示,其溯源方法为:加工一组不同面形的平面玻璃作为标准平面,固定标准平面校准口径,将标准平面送检至国家平面基准,得到标准平面在固定波长固定口径下面形的峰谷值,将其作为校准标定值,然后用被校的Hartmann-Shack波前传感器测量同一波长同一口径下的标准平面的面形峰谷值,通过与校准证书上的校准标定值进行比对,达到对Hartmann-Shack波前传感器的校准。
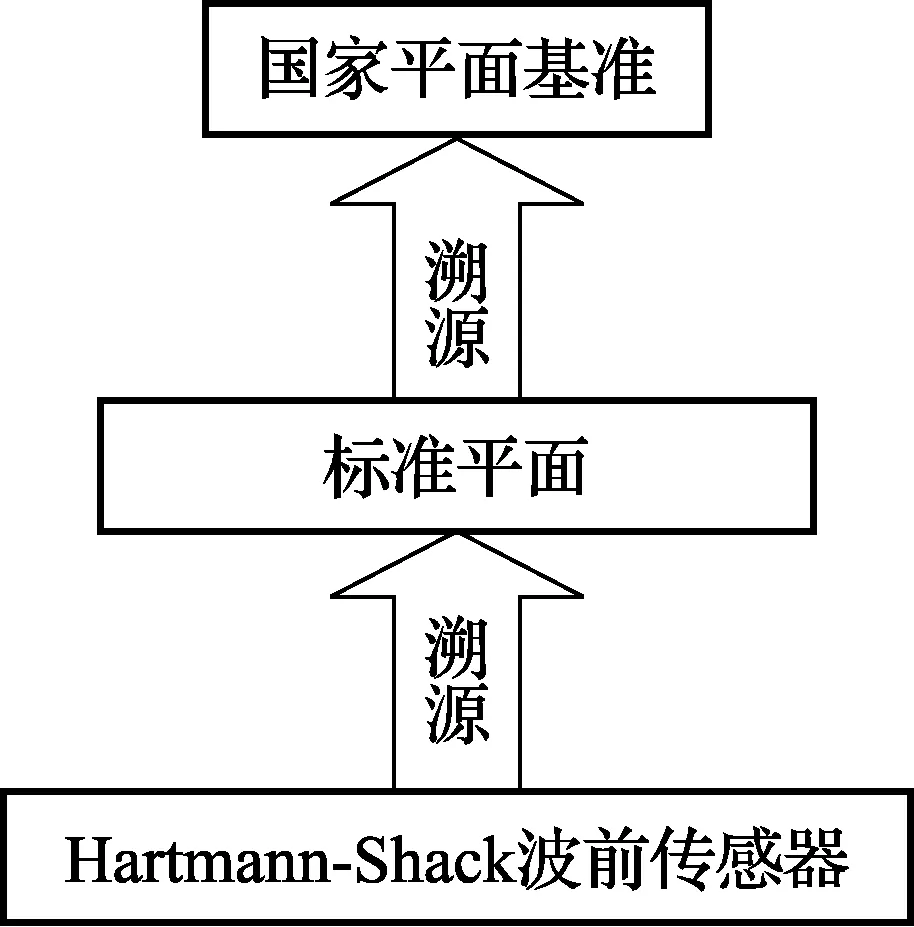
图2 Hartmann-Shack波前传感器校准溯源图
Hartmann-Shack波前传感器校准装置如图3所示,校准方法为:准直激光光源出射的激光束经衰减系统衰减后,经过分束器后到达高精度平面反射镜,高精度平面反射镜的面形峰谷值优于l/5(l=632.8nm),激光被高精度平面反射镜反射后传至分束器,经分束器折射后到达Hartmann-Shack波前传感器靶面,开启波前传感器,测量此时的激光波前峰谷值,并把该波前值作为波前传感器的参考值;然后换下高精度平面反射镜,换上标定过的标准平面,用波前传感器测量标准平面的波前峰谷值,重复测量6次以上,计算其算术平均值作为标准平面的测量值,按式(12)计算被校波前传感器的波前峰谷值示值误差。
(12)
用波前峰谷值示值误差评估被校波前传感器在固定波长、固定面形水平下是否满足说明书指标要求或客户使用要求,完成对Hartmann-Shack波前传感器在该面形值下的校准。在Hartmann-Shack波前传感器面形测量范围内,通过测量不同面形的标准平面的面形峰谷值,并与校准证书标定值进行比对,达到对Hartmann-Shack波前传感器全范围的校准。
图3 Hartmann-Shack波前传感器校准装置示意图
3.2 校准实验
实验选用3块不同面形峰谷值的标准平面,标准平面口径均为Ф15mm,上级计量机构给出的在校准波长632.8nm、校准口径Ф15mm的峰谷值分别为:0.682l,0.864l,1.039l,实验选用的被校波前传感器为美国Wavefront公司生产的CLAS-2D波前传感器;准直激光光源的波长为632.8nm,光斑直径Ф50mm,光斑直径可通过光路中的可变光阑调节,调节范围为Ф1~Ф50mm;高精度平面反射镜选用高精度平面平晶,经上级计量机构校准得到在632.8nm波长下的峰谷值为l/30。根据校准方法搭建实验装置,进行校准实验,实验测得被校波前传感器测得3块校准峰谷值分别为0.682l,0.864l,1.039l的标准平面在波长632.8nm、口径Ф15mm的波前峰谷值示值误差分别为0.093l,0.106l,0.962l。在3种面形条件下,被校波前传感器的波前峰谷值示值误差均小于l/10(l=632.8nm),满足说明书技术指标要求。
3.3 不确定度分析
根据校准方法,影响校准结果的不确定度分量主要有:标准平面送上级计量机构校准引入的不确定度u1;高精度平面反射镜面形引入的不确定度u2。
标准平面送上级计量机构校准引入的不确定度u1采用B类不确定度评定方法评定,可由上级计量技术机构给出的校准证书查得。由校准证书查得标准平面校准的扩展不确定度为U=10nm,包含因子k=2,则标准平面镜面形峰谷值校准引入的不确定度为:
u1=10/2=5nm
高精度平面反射镜面形引入的不确定度u2采用B类不确定度评定方法评定,可由上级计量技术机构给出的检定证书查得,其计算公式为
u2=Ws+U/k
(13)
由证书查得实验用的高精度平面反射镜面形偏差峰谷值校准值为21nm,其测量扩展不确定度为U=10.0nm,包含因子为k=2,则标准平晶面形误差引入的不确定度为
u2=21+10/2=26nm
以上2个影响分量独立不相关,因此Hartmann-Shack波前传感器校准合成标准不确定度的计算公式为
(14)
4 结论
Hartmann-Shack波前传感器具有结构简单、稳定和对环境条件要求低的特点,是理想的激光波前相位测量设备,并且可同时获得激光束的远场分布特征。为提高激光波前测量结果的准确度,必须定期对Hartmann-Shack波前传感器进行校准,本文创新性地提出了用不同面形的标准平面对Hartmann-Shack波前传感器进行校准的方法,该方法可将其量值溯源至国家平面基准。根据校准方法搭建了实验装置,进行了校准实验,并对校准结果的不确定度进行了分析。通过校准保证了Hartmann-Shack波前传感器测量激光波前相位的准确性,其测量结果可为激光器的研制和运行提供重要的导向参数。
[1]鲜浩,李华贵,姜文汉,等.用Hartmann-Shack传感器测量激光束的波前相位.光电工程,1995,22(2):38-45
[2]胡美鹏.示值误差不确定度按测量范围并用被测参数的函数表示.计量技术,2014(1)
[3]朱彬,许冰,胡渝.Hartmann-Shack传感器在光束质量测量中的应用.激光杂志,2001,22(2):34-35
[4]常宗英,侯美桃.简化计算测量不确定度合成形式.计量技术,2013(1)
[5]陈哲,胡永明,常胜利,等.一种重构高功率激光束波前的方法.光学学报,1999,19(3):327-333
[6]周仁忠,著.自适应光学.北京:国防工业出版社,1996
[7]邵建新,刘云虎,张子英,等.测量结果及其不确定度有效位数确定问题.计量学报,2013,34(3)
[8]刘兰琴,张清泉,景峰,等.两种不同算法重现高功率激光束的相位.强激光与离子束,2001,13(1):34-38