负阶跃力计量校准和溯源研究
2014-03-22曾利民倪守忠
曾利民 倪守忠
(浙江省计量科学研究院,杭州 310013)
0 引言
力传感器动态特性测试很重要,建立动态力计量标准具有广泛而深远的意义。动态力分为稳态激振力、瞬态负阶跃力和脉冲(冲击)力[1-4],其中负阶跃力是通过静态加力使被加载结构产生初始变形突然卸荷而产生,其特点:一方面负阶跃力静态测量与加载控制方便,测量精度高,易于实现;另一方面被加载结构自由振动,频率范围宽。根据卸荷方式负阶跃力计量标准分为:切断(熔断)式负阶跃力校准装置、气(液)动助推负阶跃力校准装置与冲击(落锤)式负阶跃力校准装置。本文对这三种装置的基本结构、原理和适用范围等进行分析,提出了负阶跃力量值溯源的思路。
1 负阶跃力计量标准装置
国外英国物理研究所(NPL)、国内中航工业北京长城计量测试技术研究所(304所)和浙江大学等率先研制了负阶跃力计量标准装置。首先施力部件给力传感器预加力,再通过卸荷部件实现力传感器、卸荷部件间迅速脱离,从而力传感器受力急剧变小直至为零。负阶跃力校准装置主要技术参数为激励幅值和下降时间,前者决定校准多大量程的力传感器,后者决定校准多宽频带的力传感器[1,5]。
1.1 切断(金属熔断)式负阶跃力校准
负阶跃力计量标准装置早期采用电或机械方法在极短时间内突然切断挂着砝码的金属丝,力传感器突然卸载至零而受到负阶跃力[1]。卸载力Funload、预加力Fload均为所挂砝码重量;下降时间Δt通过阶跃响应方法求得,具体从已测得的负阶跃响应出发,假设为二阶欠阻尼传感器系统,通过微分付氏变换或差分最小二乘法求得力传感器的传递函数,进而计算频率响应,但由于力传感器受力时有附加质量影响,从而增加了力传感器动态特性测量难度。
1.2 气(液)动助推负阶跃力校准
气(液)动助推负阶跃力校准装置由负阶跃力源、动态力测量系统、计算机数据处理与波形记录系统三部分组成,负阶跃力源如图1所示。

1.活塞缸体及支座 ;2.主推气(液)接口;3.主推活塞;4.卸荷部件; 5.压头;6.助推活塞;7.支承块;8.助推气(液)接口;9.力传感器;10.助推气(液)室;11.主推气(液)室
首先,通过主推气(液)接口向主推气(液)室加压,推动基座、力传感器、压头和助推系统加速运动,其作用力F1=P1S1,式中:F1为主推活塞推力;P1为加载气压;S1为主推活塞面积。作用力通过卸荷部件、压头传递到力传感器,此时力传感器的预加力按Fload=P1S1+G计算,式中:G为整个活塞、压头的重力。然后通过助推气(液)接口向助推气(液)室内供加压,助推活塞产生的推力按F2=P2S2计算,式中:P2为助推气压;S2为助推活塞面积。由于通过助推活塞、卸荷部件反方向施加在压头上,可保证在卸荷部件断裂过程中力传感器的荷载力Fload保持不变。平衡后助推系统迅速起作用,压头迅速脱离力传感器受力面,并保证力传感器在反弹过程中能够自由振荡,此时卸荷部件的卸载力Funload=Fload+F2。当助推力施加到一定量值后卸荷部件断裂激励出力传感器动态特性,力传感器产生从预加力Fload到稳定值的负阶跃力激励。通过数据采集、计算机系统模式识别可以获得力传感器传递函数,进而评价力传感器动态特性,工作原理如图2所示[5-6]。
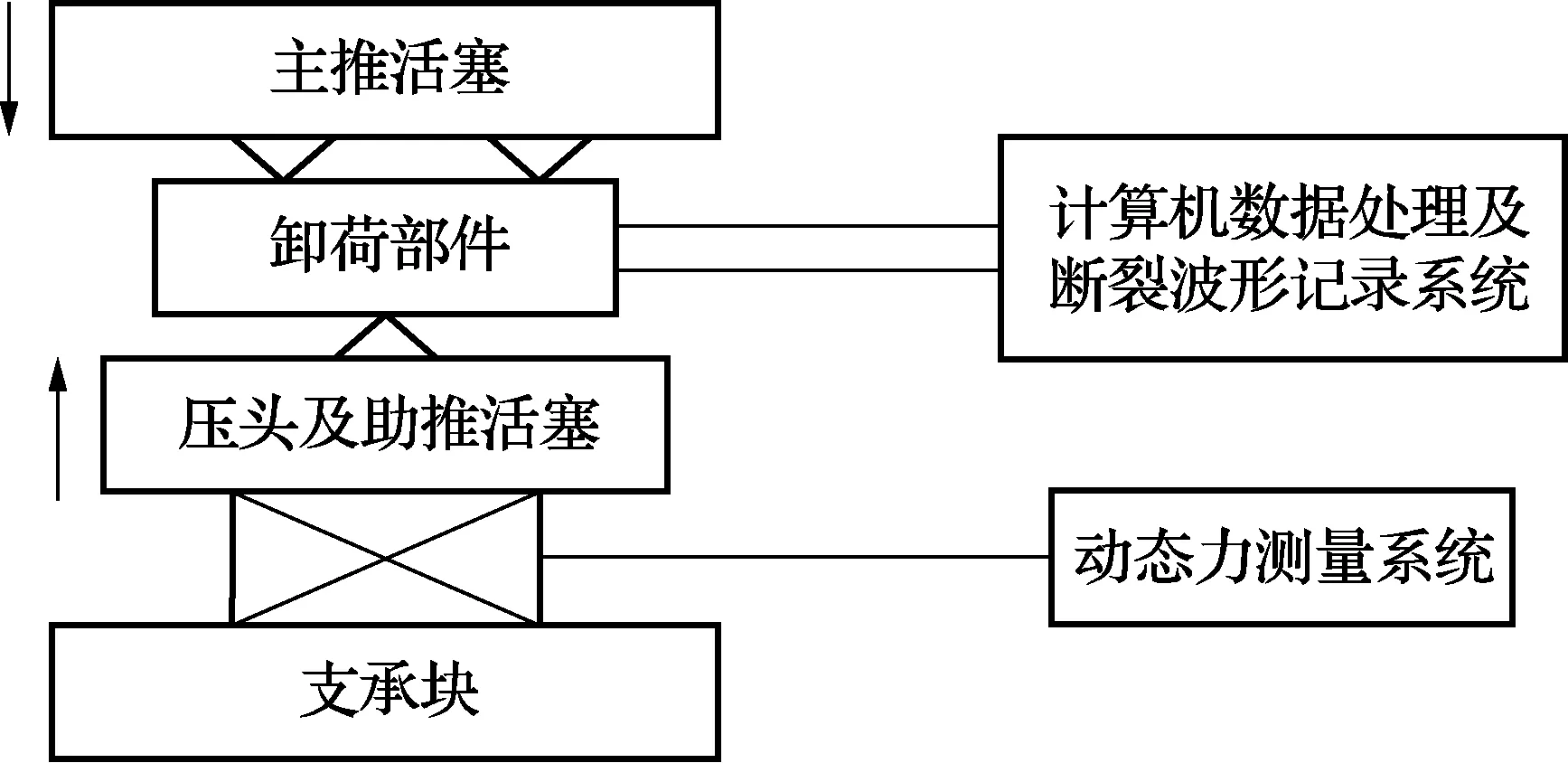
图2 负阶跃力计量校准工作原理图
负阶跃力幅值、下降时间可用不同材质和规格的卸荷部件实现,通常钢质卸荷部件断裂时间小于30μs,可保证对自振频率30kHz以下力传感器动态性能评价;而陶瓷卸荷部件断裂时间小于10μs,能保证对自振频率100kHz以下力传感器动态性能评价。
下降时间测量子系统是负阶跃力计量标准装置的重要组成部分,当卸荷部件未出现断裂时波形记录系统U1(粘贴于卸荷部件顶面细导线的电压值)、U2(粘贴于卸荷部件底面细导线的电压值)均为恒定值。随着助推力增大,卸荷部件顶面细导线首先断裂,波形记录系统显示从某个恒定值U1跳变到零;然后粘贴于卸荷部件底面细导线断裂,波形显示由另一恒定值U2跳变到零,如图3所示[6],从而可将顶面导线断路至底面导线断路的时间差当作卸荷部件实际断裂时间,并认为是负阶跃力下降时间Δt。通过一组相同规格陶瓷或钢质卸荷部件的加荷断裂时间测试,可以考查卸荷部件加荷断裂时间情况,估计负阶跃力下降时间。理论上断裂时间为两个跳变阶跃下降起始点之间的时间差,它应该是修正了通道间延迟时间差后的测量结果,但在实际测量中两个跳变阶跃下降沿都有斜度,建议用卸荷部件50%恒定值U1、50%恒定值U2对应的实际断裂时间差Δt表示。
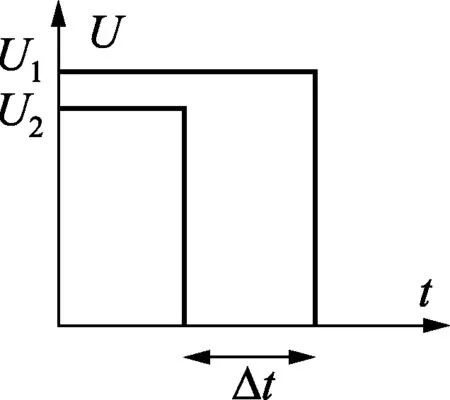
图3 卸荷部件断裂时间差示意图
1.3 冲击(落锤)式负阶跃力校准
基于落锤冲击卸荷原理的负阶跃力校准装置工作原理如图4所示,能产生下降时间短、幅值大的负阶跃力。首先,由施力部件给力传感器施加预加力,脆性材料制成的卸荷部件因受到支承块作用而承受静荷载;然后,落锤下落撞击冲杆与支承块对卸荷部件作用,当卸荷部件脆性破坏时冲杆与支承块迅速向下运动,力传感器受力迅速从预加力Fload卸荷至零[7]。
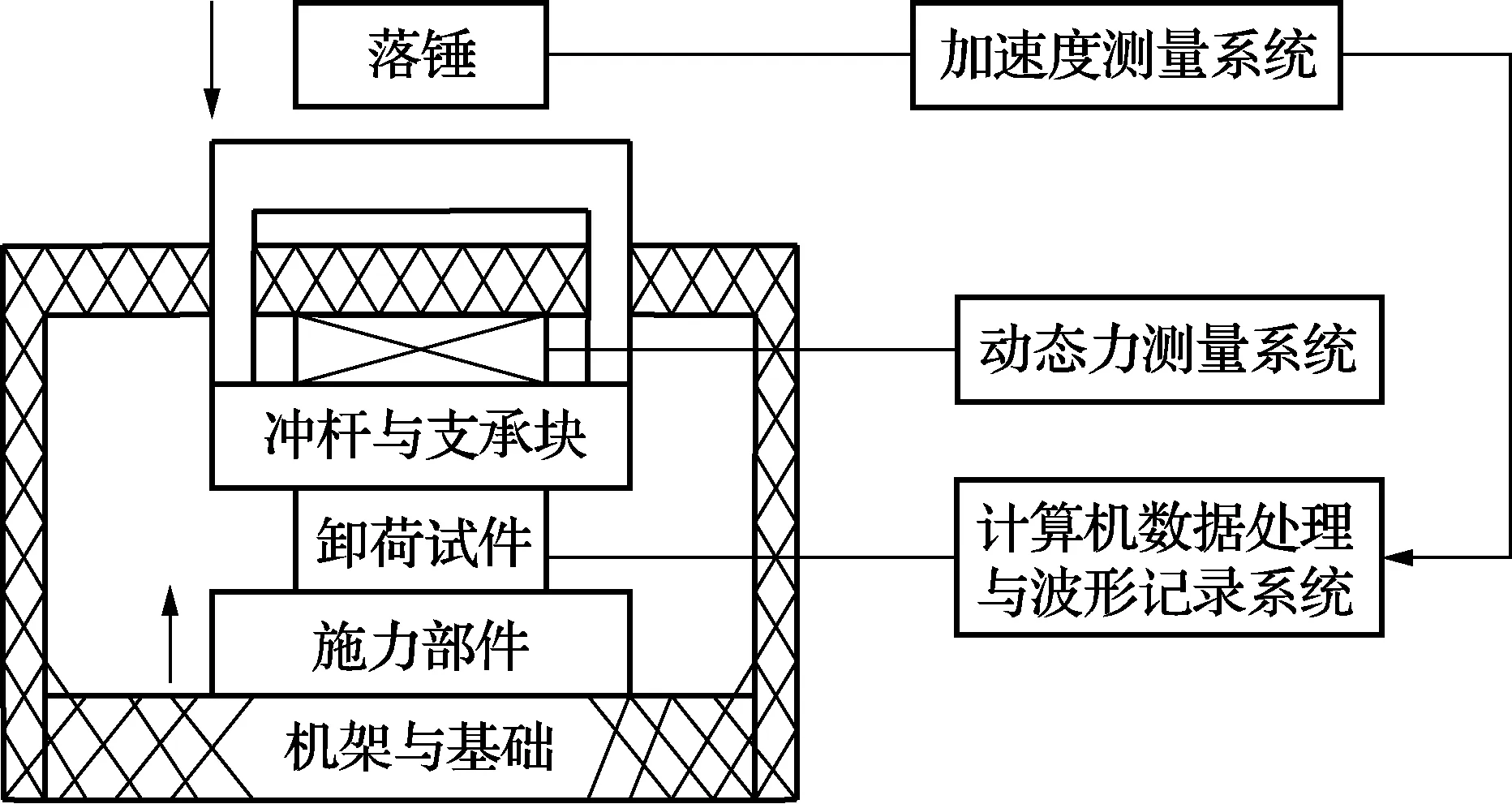
图4 落锤冲击卸荷原理的负阶跃力发生装置
为了使力传感器受力很快变小直至为零,减小负阶跃力下降时间,一要尽可能地增大落锤冲击力,二要尽可能快地缩短卸荷时间。对于前者根据弹性碰撞理论,一是提高落锤与冲杆的撞击速度,二是在应力允许的情况下优先选择高声阻抗材料(如淬火弹簧钢、模具钢等)制作落锤和冲杆;对于后者可采用卸荷部件使支承块所受向下的作用力迅速减小直至为零。一方面可用激光干涉法或加速度计法测量落锤质点的运动过程,进而对落锤质点加速度曲线进行跃变点分析可计算负阶跃力下降时间;另一方面在卸荷部件顶、底面粘贴细导线测得卸荷部件断裂时间差来分析负阶跃力下降时间。
2 负阶跃力计量溯源
负阶跃力包含预加力、跃变过程。当下降时间Δt与自振频率f满足Δt<1/f时,便可认为力传感器的阶跃响应被激励出来。在阻尼一定时振荡频率越高,下降时间、峰值时间越短,响应速度越快[6]。压电式力传感器响应局部受限振荡,非受迫运动典型曲线如图5所示,其特征:
1)在零时刻以恒力作用在力传感器上,预加力Fload用静态测量,易于实现;
2)信号归零,下降时间(即力传感器输出的阻尼衰减振荡过程中受力从预加力Fload第一次至稳态值间差值的90%到其差值的10%所需时间)可通过卸荷部件断裂时间差或落锤冲击运动过程进行估计;
3)超调量明显,第1波谷的谷值与稳定值间有差异。

图5 负阶跃力时域曲线
国内外动态力计量溯源研究不多,我们结合力值计量器具检定系统,根据负阶跃力定义、测量方法及其应用提出了负阶跃力计量校准等级序列[7],Urel为负阶跃力扩展测量不确定度,如图6所示。负阶跃力计量标准装置可对标准测力系统进行量值传递,也可进行力传感器和力测量系统进行动态性能校准;标准测力系统可对动态力设备或动态力试验装置进行校准,因而明确了负阶跃力计量标准装置向动态力工作计量器具进行量值传递的程序、测量不确定度及基本方法。
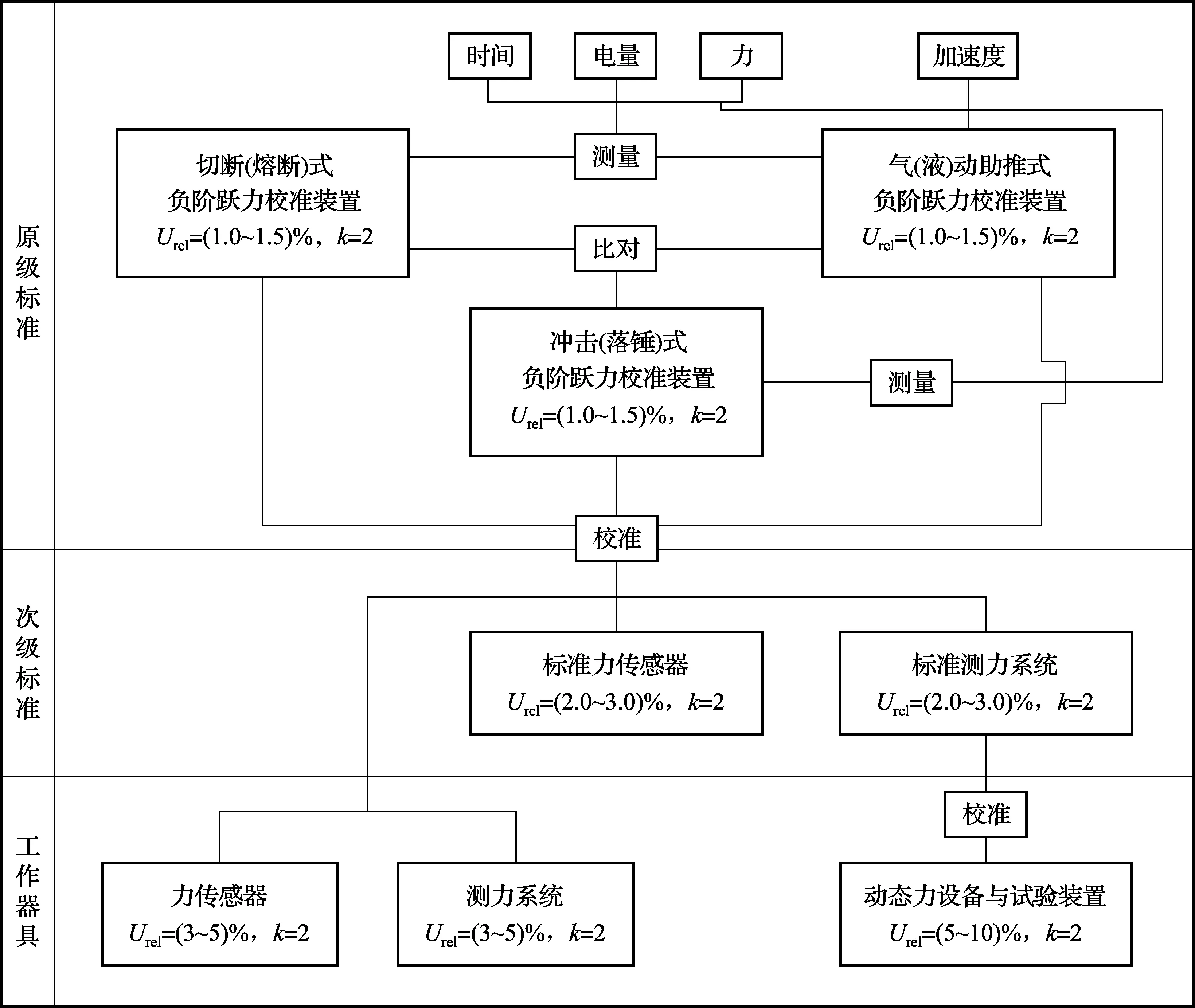
图6 负阶跃力计量校准等级序列(溯源图)
负阶跃力计量校准有其优势,可选取不同材质、规格的卸荷部件获得不同幅值、下降时间(自振频率)。负阶跃力影响环节、影响因素少,其幅值无沦是切断(熔断)式、气(液)动助推式还是冲击(落锤)式负阶跃力校准装置都可按力值计量器具检定系统表进行溯源;下降时间除采用阶跃响应方法求得外,可测量落锤运动过程或卸荷部件断裂过程进行估计。根据力传感器阶跃响应曲线可求出力传感器的幅频特性、相频特性与自振频率[7],若力传感器在不同幅值(如20%、50%、80%量程)阶跃输入信号激励下自振频率变化超过规定值,则可参照国家计量技术规范JJF 1053《负荷传感器动态性能校准规范》判该力传感器不适合动态使用。由于力传感器负阶跃响应给出的动态特性指标会因阶跃响应引入附加噪声,因而建议假设力传感器为二阶欠阻尼系统,通过微分付氏变换或差分最小二乘法拟合先求得力传感器的传递函数,再计算力传感器频率响应。
3 结束语
幅值、下降时间(自振频率)是负阶跃力测量重要技术参数,一方面由于负阶跃力激励幅值采用静态测量,卸荷部件承载力离散性大且不可控,激励过程不能直接指示,另一方面由于安装机架的剧烈振动会使负阶跃力不能保持单调下降,并受附加质量影响在力传感器上作用的下降时间要大于卸荷部件的断裂时间,因而负阶跃力计量校准方法有待进一步完善。另外,由于负阶跃力幅值、下降时间之间相互矛盾,因而如何设计较为理想的卸荷部件是复现大力值宽频带负阶跃力的关键,安装条件、状态也是影响校准结果的重要因素。为提高负阶跃力测量准确度,可进一步研究如何建立振动模型和运动学方程进行关键技术分析。
[1]何闻.标准动态力发生装置国内外研究现状[J].机电工程,1999(2)
[2]孙桥,于梅.冲击及瞬态冲击力绝对法校准技术的研究现状[J].工业计量,2005(1)
[3]张力.激光干涉法进行正弦力校准研究[J].计量学报,2005(5)
[4]孟峰,张跃,等.脉冲式动态力校准装置发展动态[J].计量技术,2011(5)
[5]张训文,肖跃华,等.100kN气动助推式负阶跃力校准装置[J].测试技术学报,2004(18,增刊)
[6]梁志国,孟晓风,等.一种负阶跃力源上升时间的评价[J].计测技术,2008(6)
[7]曾利民,倪守忠,等.动态(冲击)力计量校准装置研制[R].浙江省计量科学研究院.2011:44-45
