JJF 1377—2012《水准式车轮定位测量仪》校准规范的解读与分析
2014-03-22郭晓冬
郭晓冬 闫 军 郭 超
(内蒙古计量测试研究院,呼和浩特 010020)
0 引言
水准式车轮定位测量仪是测量汽车转向轮外倾角、转动主销内倾角、转动主销后倾角及车轮前束的计量器具。全国成千上万家的汽车维修企业和几千个机动车性能检测站都配备和使用了此种仪器。水准式车轮定位测量仪就是测量汽车车轮定位参数的仪器,其技术性能与汽车操纵稳定性密切相关,对汽车行驶安全越来越重要,因此其量值的准确与否直接影响到汽车行驶安全。所以,对水准式车轮定位测量仪校准是十分必要的。
原机械工业部有JJG(汽车)03-95《水准车轮定位仪》检定规程,但随着社会进步及计量技术水平提升,该规程已不能满足要求。作为规程的主要起草人,经过两年多的努力,在征求国内知名专家和各个科研院所意见的基础上,研制了辅助直角座,实现了在角度标准装置上对两组垂直方向水准泡的校准,同时经过大量的实验验证,制定了该校准规范。
JJF 1377—2012《水准式车轮定位测量仪》校准规范已于2013年03月12日正式执行,本文主要是对规范的特点和规范名称命名的原因进行了说明,然后分析和讨论了其中几项关键的技术指标,以便更好地指导实际校准工作。
JJF 1377—2012《水准式车轮定位测量仪》校准规范是为水准式车轮定位测量仪校准而制定的,同时也是各地市建立计量标准的依据。考虑到“车轮定位仪”不仅可以用于测量汽车前轮(转向轮)的外倾角、转动主销后倾角、转动主销内倾角及前束,而且可以测量汽车后轮的外倾角及前束,所以,名称用“车轮定位测量仪”更合适。同时,根据其测量原理,本规范就命名为“水准式车轮定位测量仪计量校准规范”。
本校准规范的主要依据是GB 7258—2004《 机动车运行安全技术条件》和GB/T 3730.3—1992《 汽车和挂车的术语及其定义车辆尺寸》,同时参考了原机械工业部JJG(汽车)03-1995《水准车轮定位仪检定规程》。严格地说,水准式车轮定位测量仪是一种测量角度的组合式计量器具,因此,在制定校准规范的过程中充分考虑了其组合式的特殊性,确保校准方法和技术特性具有科学性、普遍性和实用性。
1 本规范的主要特点
1)在概述中明确阐述了水准测量器的测量原理,并将主销后倾角与主销内倾角水泡角度示值与该水准泡轴线的水平倾斜角度的比例关系以比例系数ηθ进行定义, 同时在附录中给出推导过程便于读者理解。
2)水准式车轮定位测量仪的产品技术参数中都没有提到“分度值”的技术指标,考虑到计量器具分度值的重要性,在这里本规范提出水准测量器及转盘的分度值均为0.5°,前束尺的分度值为1mm。
3)水准式车轮定位测量仪的示值误差,基本上都为5%,因为当测量1°时,5%误差即为0.05°=3′,在水准器上是根本无法认定的。所以,本规范规定:水准测量器的示值误差为“ ± 0.5°或± 5% ”,满足两组要求中任一项即可,因为水准测量器的分度值规定为0.5°,估读1/5是可行的。
4)转盘示值误差,也为5%,在测量转动主销内倾角及后倾角时,因为它们是空间立体角,必须采用转盘左转20°,再右转20°才能得到。所以,转盘转角的正确性将直接影响到转动主销内倾角及后倾角的测量结果准确性。
主销内倾角β数学模型
β=φ/2sinθ
式中,φ为车轴倾斜角(车轴与水平面的夹角)。
我们假设,车轴倾斜角φ为5°,计算数据如表1所示。

表1 转盘转角正确性对主销内倾角示值误差的影响
从表1中的数据可以看到,主销内倾角的示值误差允许± 0.5°,转盘转角的准确性以不超过± 1.0°为宜。
5)前束尺的示值误差,因为一般车辆同轴左右轮的轮距在2~4m,为保证前束测量的准确性,其示值误差为±2mm比较恰当。
6)增加了“辅助直角座”,由于水准测量器实际上是由两组相互垂直的“水泡”构成,所以在一个定轴旋转的角度标准装置上,必须加上“辅助直角座”才能满足校准需要。
7)对转盘的校准给出了两种方法,其中采用经纬仪校准转盘相对较为方便。经纬仪的准确度是可以忽略的,目前市场上比较普遍的是DJ6级经纬仪,只要检定合格就可使用。而且,规范中规定:“用望远镜瞄准远处(>15m)目标线”,在这种情况下,即使“经纬仪竖轴中心”与转盘中心偏差10mm时,所引起的角度差也满足要求(10mm/15m)=0.00067rad≈0.038°)。
2 用经纬仪校准转盘测量不确定度的评定
2.1 数学模型
校准时,将经纬仪安置在被校转盘上,当转盘转动某一角度值ω时,读取经纬仪的标准角度值ω*。被校水准式车轮定位测量仪转盘示值误差测量结果的数学模型为
Δω=ω-ω*
(1)
依方程

(2)
由式(1)得方差
(3)
式中:u(ω)为转盘角度示值引入的标准不确定度分量;u(ω*)为经纬仪角度示值引入的标准不确定度分量。
传播系数
c(ω)=∂Δω/∂ω=1
(4)
c(ω*)=∂Δω/∂ω*=-1
(5)
根据式(4)、(5)得标准不确定度:
u2(Δω)=(1)2u2(ω)+(-1)2u2(ω*)
(6)
2.2 输入量的不确定度来源
1)被检转盘角度示值ω对准偏差引入的标准不确定度分量u(ω)=u1
2)由经纬仪重复性测量结果估计值ω*引入的标准不确定度分量
uA(ω*) =uA
3)由经纬仪竖轴中心与转盘旋转中心不重合引入的标准不确定度分量u1(ω*)=u2
4)由经纬仪本身准确度ω*引入的标准不确定度分量u2(ω*)=u3
2.3 标准不确定度分量
2.3.1被校转盘示值ω对准偏差引入的标准不确定度的评定
根据测量方法,当转盘转动某一角度值时,读取经纬仪的标准角度值。由于转盘刻度及指标线比较粗糙,对准误差估计为1/10分度值。一般转盘的分度值为1°,测量某一角度时,首先对准“零”刻线,再对准所测量刻度线,需要对准2次。按均匀分布计,则引入的标准不确定度为:
2.3.2经纬仪重复性测量结果估计值ω*的标准不确定度的评定
当转盘转动某一角度值时,读取经纬仪的标准角度值。由于转盘分度值比较“粗”及刻度线的对准等因素,使对准转盘同一测量点所得经纬仪的标准角度值会有所变化。采用A类方法进行评定。在标准装置及被校转盘正常工况条件下,在转盘转动至30°时等精度重复测量10次,测得数据如表2所示。

表2 转盘转动至30°时重复测量测得数据
实际测量时,在每个测量点读取1次,故测量重复性引入的标准不确定度为
uA(ω*)=6.3′
2.3.3经纬仪竖轴中心与转向盘旋转中心不重合引入的标准不确定度的评定
根据校准方法,应将经纬仪的竖轴中心O*处于转向盘的旋转中心O上,实际上不存在偏心量e。经多次试验经纬仪的竖轴中心与转向盘的旋转中心的偏心差超过10mm。根据规范规定经纬仪瞄准点应距转盘中心(≥15m)的A和B,如图1所示。
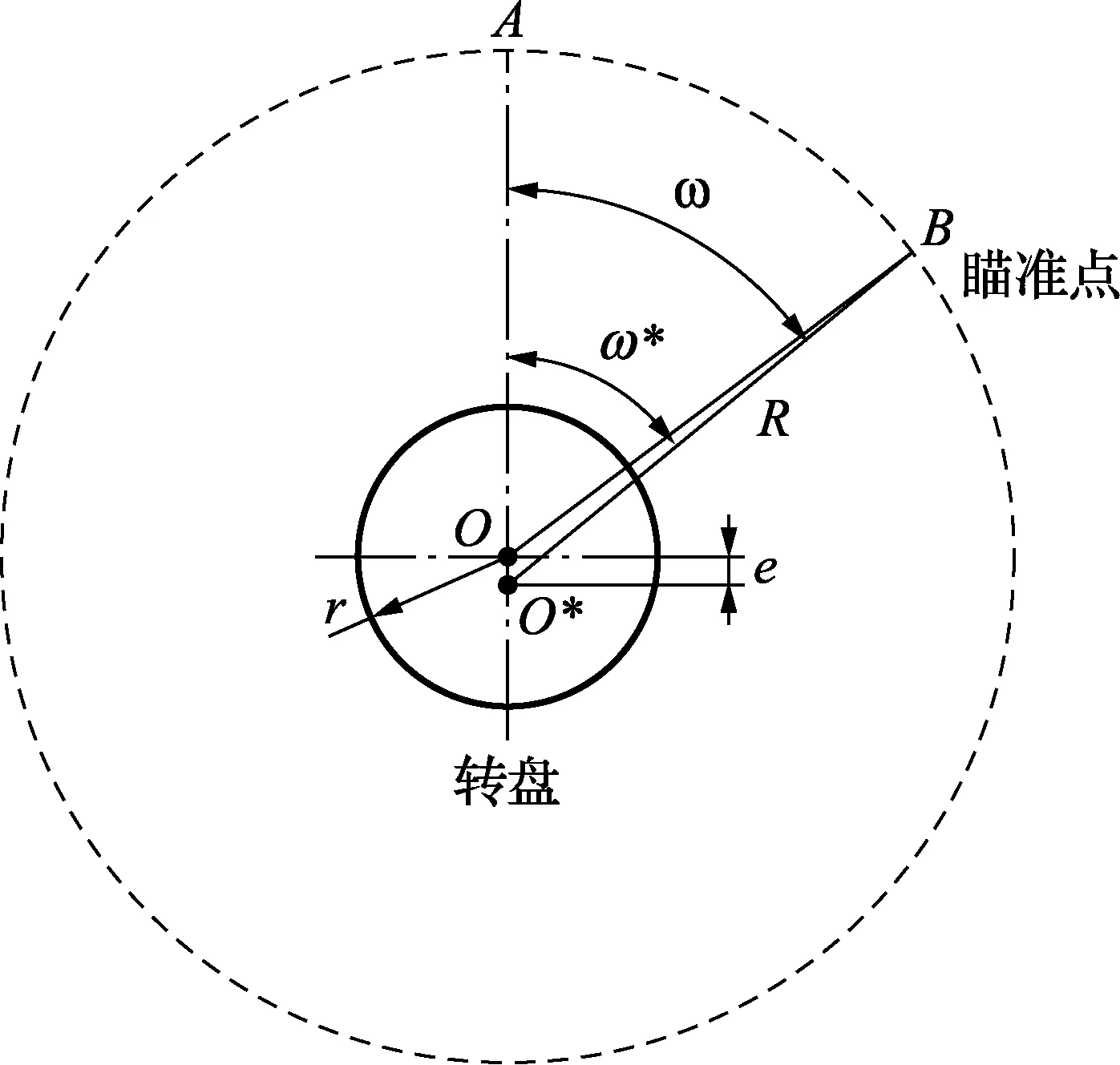
图1 经纬仪校准“转盘”示值误差方法示意图
偏心引起的角度误差(按最大测量角30°计)为
=arcsin(0.00033)= 1.1′
按均匀分布计,引入的标准不确定度为:
2.3.4经纬仪本身准确度ω*引入的标准不确定度的评定
根据规范规定,允许采用DJ6级经纬仪测量,根据JJG 414—2003《光学经纬仪》规程规定一测回水平方向标准偏差为20″(即0.33 ′),则u2(ω*)=0.33 ′,标准不确定度分量一览表见表3。
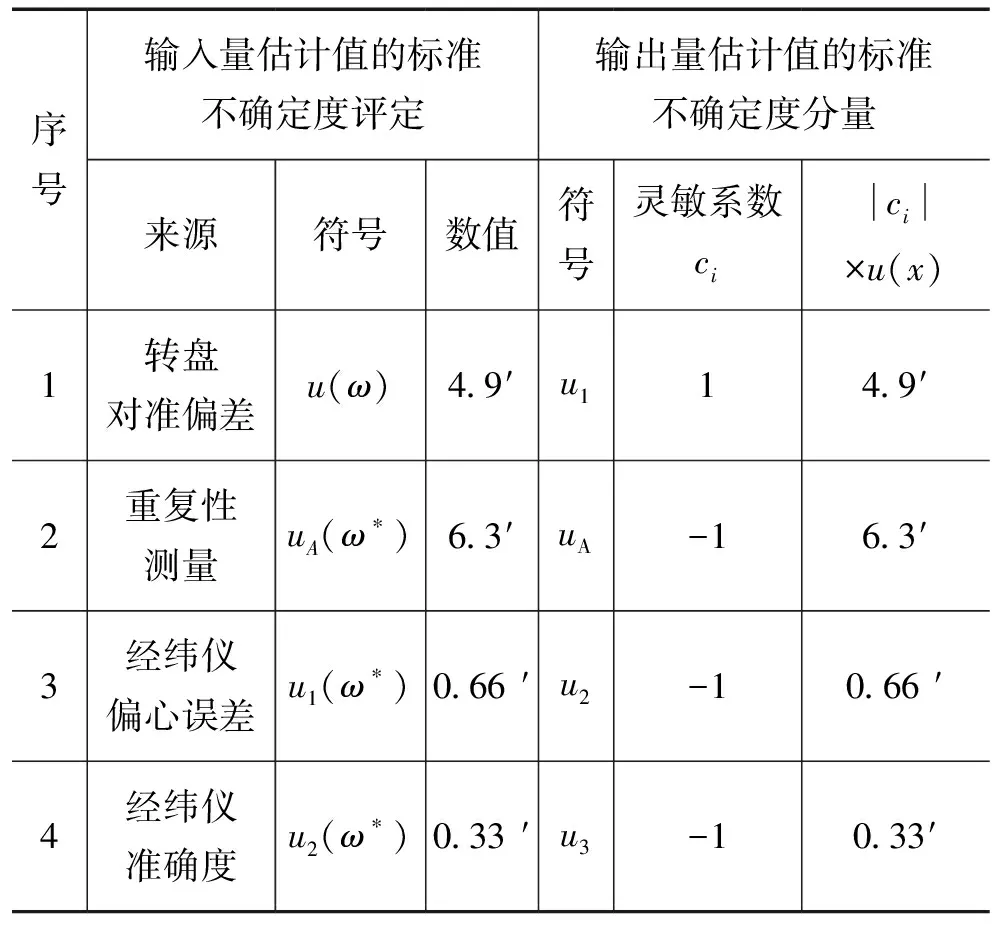
表3 标准不确定度分量一览表
2.4 合成标准不确定度的计算
由于各标准不确定度分量相互无关,故

2.5 扩展不确定度的计算
U=k·uc= 16′=0.27°(取k=2)
2.6 测量不确定度的报告
根据被校准水准式车轮定位测量仪对转盘示值误差不得超过±1.0°的要求,测量结果扩展不确定度评定为U=0.27°
3 结束语
通过对本规范主要技术指标进行分析和解读,可得出以下结论: 我们制定的 《水准式车轮定位测量仪校准规范》用于水准式车轮定位测量仪的校准是可行的,达到了国家计量校准规范在制定中提出的计量性能及技术要求,主要技术指标科学合理、操作性强,而且便于实施。
[1]GB 7258—2004机动车运行安全技术条件
[2]JJF 1001—2011通用计量术语及定义
[3]JJF 1071—2010国家计量校准规范编写规则
[4]JJF 1059—2012测量不确定度评定与表示
[5]JJG(汽车)03—1995水准车轮定位仪检定规程
[6]GB/T 3730.3—1992汽车和挂车的术语及其定义车辆尺寸
[7]汽车检测人员岗位培训教材.汽车综合性能检测.上海科学技术文献出版社,2000
[8]JJG 892—2011《验光仪》检定规程的解读与分析.计量技术,2013(10)
