基于双稳态机制的低g值微加速度开关
2014-03-21于海鹏
慕 昆,于海鹏
(河南工程学院计算机学院,河南郑州 451191)
0 引言
与加速度传感器不同[1-3],加速度开关可以在不对复杂信号进行处理的情况下,检测加速度阈值并且触发安全保护机制,进而在突发情况下减少伤害程度。同时,加速度开关具有响应速度快、灵敏度高、抗干扰性强等优点。因此,加速度开关在工业生产、武器制造、检测系统和汽车安全气囊中被广泛地应用。
对于加速度开关来说,阈值检测的精确性,响应时间和开关闭合后的保持特性都是加速度开关研究的重点。众所周知,采用不同的开关触发结构可以带来不同的触发效果[4-8],同时缩小开关的加工尺寸也可以改善开关的稳定性及其动态特性[9-11]。因此学者们花费了大量的时间和精力来研究更先进的触发结构;并且微机电加工系统(MEMS)也被用于器件尺寸的缩小。Andojo Ongkodjojo等[4]报道了一种不需要触点的微加速度开关,其优点是可以降低检测功耗。丁桂甫等[5]研究了一种基于柔性电极的加速度开关,其优点是可以延长触点与质量块的接触时间。Guo等[6-7]研究了一种带有自锁功能的加速度开关,这样可以增加接触的可靠性和稳定性。徐媛等[8]设计了一种水银加速度开关,其优点是大大降低了触点的接触电阻。以上介绍的加速度开关,虽然其触发和保持的结构不同,但是其弹性单元都属于线性弹性机制。
与线性弹性机制不同,双稳态机制具有突变弹跳阈值和稳态保持的特性,因此,可以被用于加速度开关中的弹性梁单元,进而提高检测灵敏度并且增加响应速度。同时,双稳态机制可以保持“开启”和“闭合”状态,这样可以在没有辅助的条件下,延长接触时间。目前,许多基于双稳态机制的加速度开关被研究和报道。赵剑等[12-14]设计并制作了宏观尺寸的双稳态加速度开关,此开关具有精确的响应阈值和良好的保持特性。文献[15]介绍了两种使用平行双稳态机制,并且具有高灵敏性的小尺寸加速度开关。但是,较大的几何尺寸限制了响应时间和稳定性的进一步提升。
文中设计了一种基于双稳态柔性机制的低g值加速度开关,并采用了MEMS中的多层微电铸技术进行加工。此微加速度开关具有体积小,响应阈值精确,响应速度快,具有闭合保持功能等优点。微加速度开关的结构包括双稳态柔性悬臂梁、可移动质量块和固定触点,其中双稳态柔性悬臂梁的宽度、厚度和长度分别是28.0 μm、25.0 μm和5 150.0 μm.
1 设计与分析
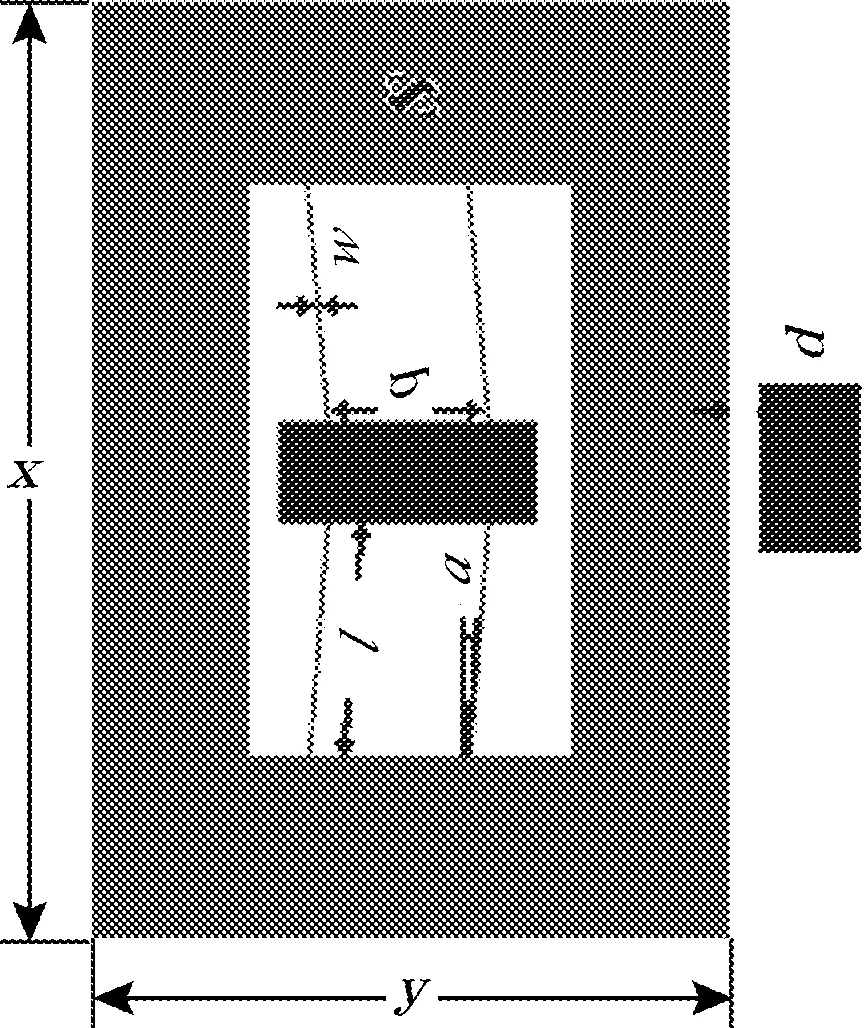
根据静态工作原理,双稳态加速度开关的开启和闭合状态,是在非线性弹性力和惯性力的共同作用下完成的。微加速度开关的结构示意图如图1所示,其中,MEMS加速度开关使用超长的双稳态弹性悬臂梁作为弹性单元,此外器件还包括一个触点和一个质量块。质量块和梁是悬空的,而触点和中间的部分被固定在衬底上。图2展示了器件设计的几何尺寸,其中,d是质量块和触点间的距离,h表示质量块和悬臂梁的厚度,S表示质量块的面积。
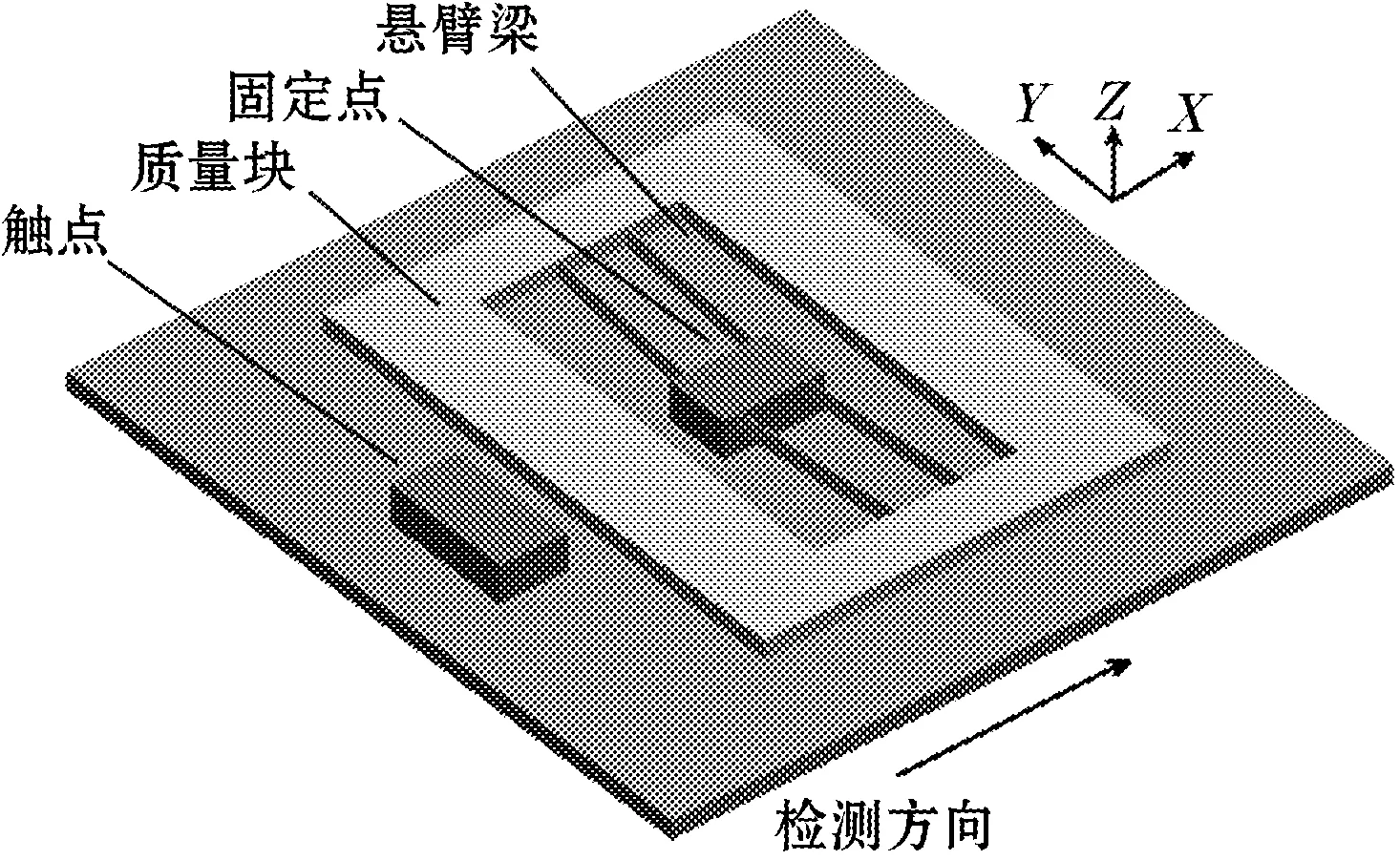
图1 微加速度开关的设计示意图
(a)初始开启状态

(b)闭合状态
微加速度开关的动作过程如图2所示。在初始状态,质量块和触点没有接触,悬臂梁也是初始的V字形,如图2(a)所示;在有外部加速度作用的情况下,质量块向触点快速移动,并且与触点接触,开关闭合,悬臂梁的形状也发生改变,如图2(b)所示。
微加速度开关的各个参数设计如下:首先可以根据加速度阈值与柔性结构力的关系得到:
m·a≥Fjump-max
(1)
式中:a为是加速度阈值;m为是质量块的质量;Fjump-max为悬臂梁的最大柔性力。
假设质量块只有水平方向上的移动,结构参数和加速度阈值之间的详细关系式可表示为:
S·h·ρ·a≥Fjump-max
(2)
式中:S,h和ρ分别表示质量块的面积,厚度和密度。
在式(2)中,h,ρ,a是给定的设计参数,S和Fjump-max是需要调整的参数。特别地,Fjump-max是由梁的长度参数l,宽度参数w,和初始角度参数θ共同决定,根据这些参数可以计算出柔性梁跳转力跳转位移之间的关系[16]。计算曲线如图3所示,在θ,w被进一步确定的前提下,可以根据曲线图获得Fjump-max与l的关系。最后,质量块面积S和梁长l的最佳尺寸匹配可以通过线性搜索的方法得到。
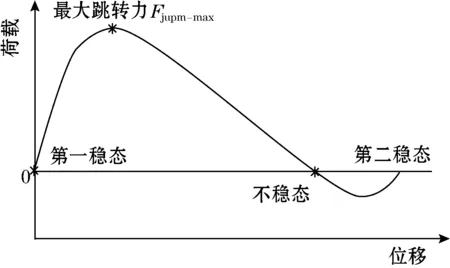
图3 加速度荷载与位移的关系
当设计加速度阈值为35.0g时,微加速度开关的计算参数如表1所示。
为了进一步验证计算结果,将非线性双稳态弹性梁的数值带入ANSYS中进行仿真,仿真结果如图4所示。其中,图4(a)展示了柔性梁的形变效果和质量块的移动情况,图4(b)为质量块位移与弹性力之间的关系曲线。在位移-弹性力曲线中,其受力最高点的峰值是8.29 mN.将这个数值带入式(2)中,可以计算出对应的加速度值为35.0g,这与之间的理论计算结果非常吻合。
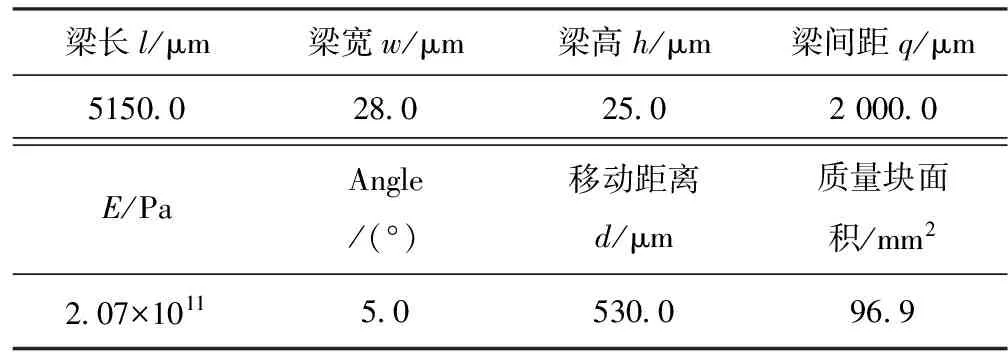
表1 微加速度开关的计算参数表

(a)双稳态梁变形过程

(b)双稳态梁的位移-弹性
2 微加速度开关的制作工艺
由于悬臂梁的长宽比较大,并且是悬空结构,因此采用多层电铸技术来加工微加速度开关。其中,SU-8胶被用作模具层,正胶被用来当做悬空牺牲层。镍由于其良好的机械特性,不会在强烈的冲击中被折断,因此被用来当做电铸的主体金属。质量块和梁的电铸厚度由电铸时间精确控制。
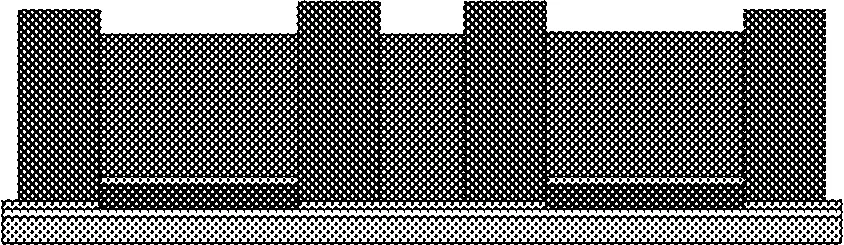
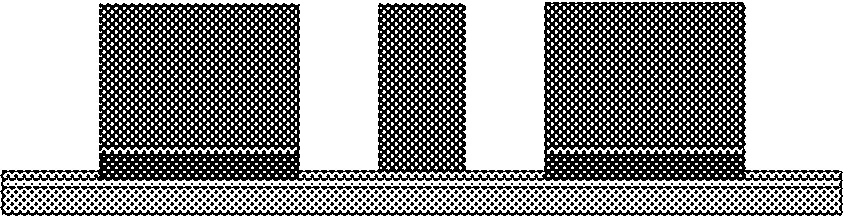
微加速度开关的主要加工步骤如图5所示。
(1)硅片的清洗和氧化,见图5(a);
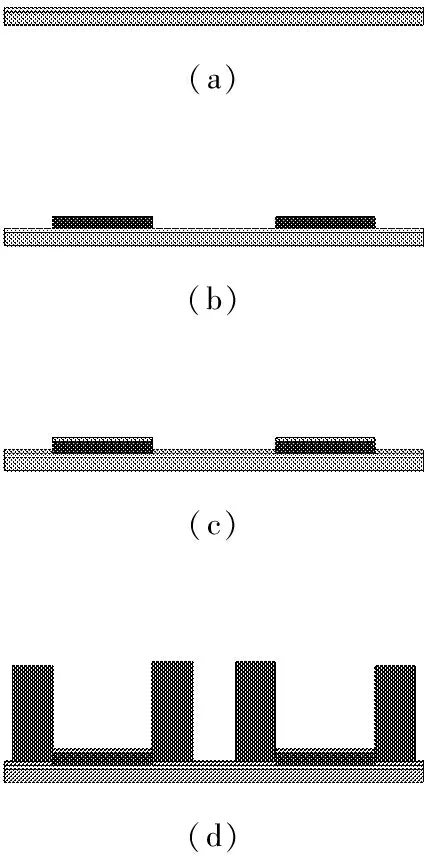
(e)
(f)

图5微加速度开关的加工步骤
(2)第一层作为牺牲层的正胶被旋涂在硅片表面,见图5(b);
(3)溅射Cu作为电铸的种子层,见图5(c);
(4)作为模具层的 SU-8胶被旋涂在种子层上,并光刻出图形,见图5(d);
(5)电铸生长25 μm厚的质量块,悬臂梁和触点,见图5(e);
(6)使用SU-8胶去胶液去除SU-8胶,见图5(f);
(7)去除种子层和牺牲层,在氮气氛围中悬空释放结构,见图5(g)。
加工好的微加速度开关如图6所示,其中图6(a)所展示的是微加速度开关的初始状态,插图内容是悬臂梁在显微镜下的照片;图6(b)是微加速度开关在加速度作用下,闭合后的照片,从照片可以看出开关在闭合后具有良好的稳态保持特性。

(a)微加速度开关制作完成后的照片
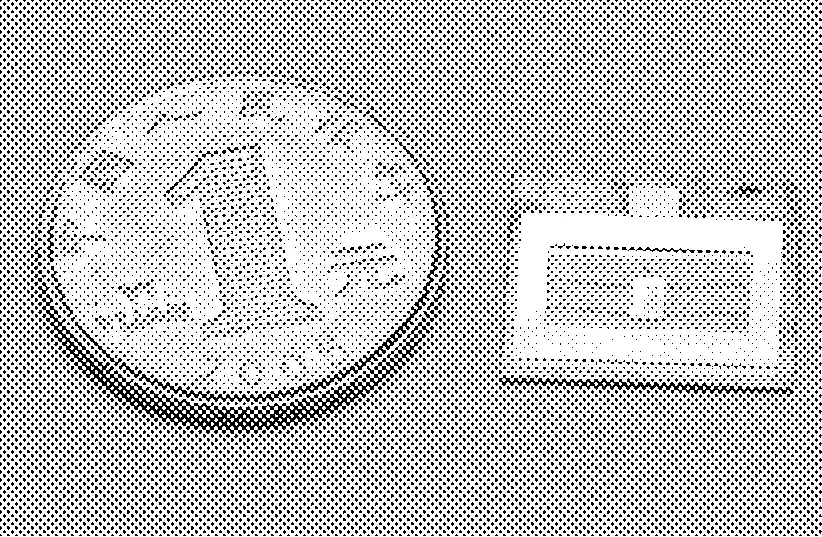
(b)微加速度开关闭合后的照片
3 试验结果
为了能在开关闭合后输出响应信号,在微加速度开关上连接了一个电池和蜂鸣器。当外部施加的加速度达到闭合阈值时,开关闭合,蜂鸣器发出迅响,外部加速度的施加由旋转平台来提供。旋转平台测试系统如图7所示,其旋转臂是由伺服电机带动,伺服电机的转速由电机控制器进行精确控制。平台的旋转臂长12.3 cm,其最大转速为2 000 rad/min,可以提供0~550g的测试加速度。平台旋转速度与所提供加速度的关系如式(3)所示:
(3)
式中:G为由旋转提供的加速度值;R为是旋转平台有效力臂;ω为是旋转角速度。

图7 微加速度开关的测试系统
在实际测试时,微加速度开关距离旋转平台的中心距离为12.0 cm,当旋转平台的转速调整到485 rad/min时,开关闭合,蜂鸣器发出迅响。在此平台上连续进行7次测试,连续的试验结果如图8所示。试验结果表明微加速度开关具有可重复的精确响应阈值,其阈值为(32.6±0.2)g,并且在开关闭合后,具有良好的保持功能。
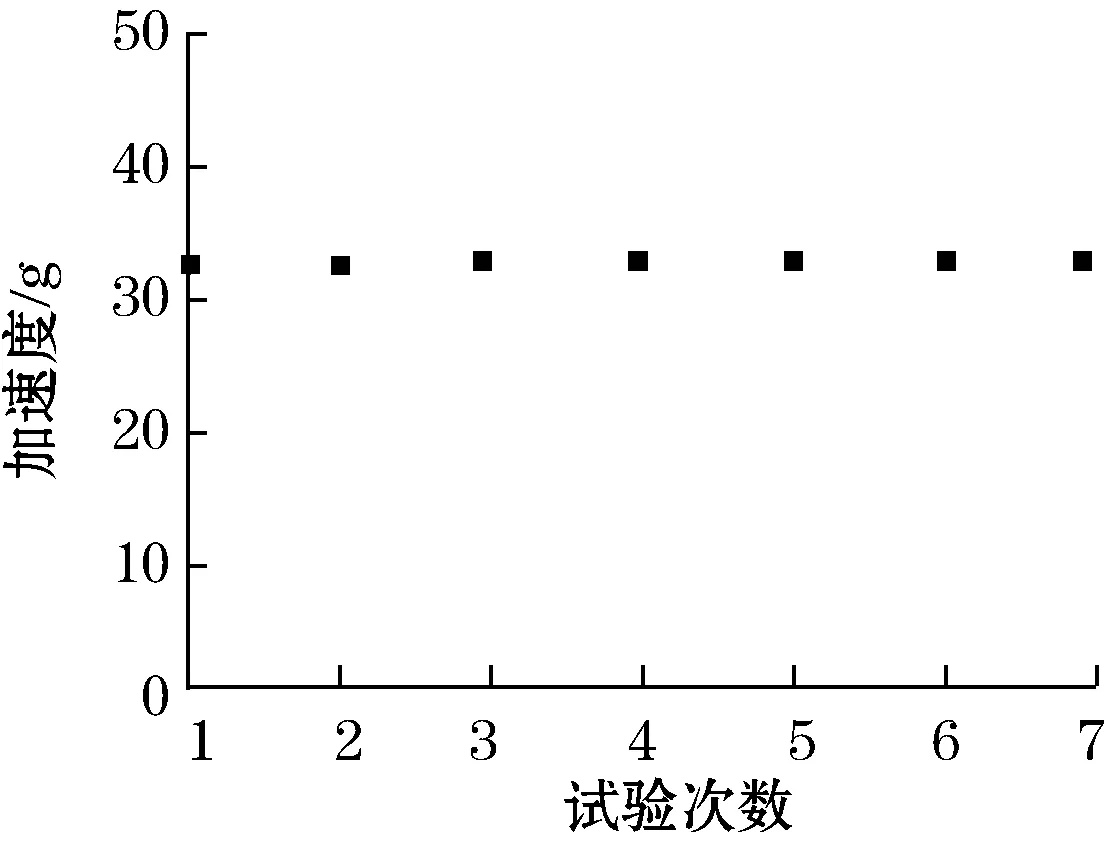
图8 阈值响应的试验结果
4 结论
设计了一种包含双稳态柔性机制的低g值加速度开关,并且使用ANSYS软件对计算结果进行仿真,仿真结果和计算数值非常吻合。确定参数后,采用了MEMS中的多层微电铸技术进行加工,制作了微型化的加速度开关。经过多次试验表明,器件的触发的加速度阈值是(32.6±0.2)g,可移动质量块的行程距离是530 μm,并且开关在闭合后具有保持功能。此加速度开关成功地缩减了双稳态加速度开关的几何尺寸,并且进一步改善了其稳定性。
参考文献:
[1]SUN C M,TSAI M H,LIU Y C,et al.Implementation of a monolithic single proof-mass Tri-Axis accelerometer using CMOS-MEMS technique.IEEE Transactions on Electron devices,2010 ,57(7),1670-1679.
[2]AMINI B V,ABDOLVAND R,AYAZI F.A 4.5-mW Closed-Loop ΣΔ Micro-Gravity CMOS SO)Accelerometer.IEEE Journal of Solid-state Circuits,2006,41:2983-2991.
[3]QU H W,FANG D Y,XIE H K.A Monolithic CMOS-MEMS 3-Axis accelerome ter with a low-noise,low-power dual-chopper amplifier,IEEE Sensors Journal,2008 (8):1511-1518.
[4]ONGKODJOJO A,TAY F E H.Optimized design of a micromachined G-switch based on contactless configuration for health care applications.International MEMS Conference 2006,34 :1044-1052.
[5]CAI H G,YANG Z Q,DING G F,et al.Development of a novel mEMS inertial switch with a compliant stationary electrode.IEEE Sensors Journal,2004,112:175-183.
[6]GUO Z Y,YANG Z C,LIN L T,et al.Design,fabrication and characterization of a latching acceleration switch with multi-contacts independent to the proof-mass.Sensors and Actuators A,2011,166:
[7]CURRANO L J,YU M.Balakumar balachandran,latching in a MEMS shock sensor:Modeling and experiments.Sensors and Actuators A,2010,159:
[8]徐媛,杨涛,蔺怡,等.水银微流体惯性开关的研制,纳米技术与精密工程,2013 (11):424-429.
[9]MATSUNAGA T,ESASHI M.Acceleration switch with extended holding time using squeeze film effect for side airbag systems.Sensors and Actuators A,2002,100:10-17.
[10]GO J S,CHO Y H,KW'AK B M.Acceleration Microswitches with adjustable snapping threshold.The 8th International Conference on Solid-state Sensors and Actuators,and Eurosensors IX.Stockholm,Sweden,1995:411-413.
[11]MCNAMARA S,GIANCHANDANI Y B.LIGA fabricated 19-element threshold accelerometer array.Sensors and Actuators A,2004,112:175-183.
[12]王洪喜,赵剑.具有双稳态特性的永磁惯性开关,纳米技术与精密工程,2009(7):137-141.
[13]赵剑,贾建援,王洪喜,等.一种V形梁结构的双稳态惯性开关,航空学报,2008,29:1157-1162.
[14]ZHAO J,YANG Y T,FAN K F,et al.A bistable threshold accelerometer with fully compliant clamped-clamped mechanism,IEEE Sensors Journal,2010,10(5),1019-1024.
[15]HANSEN B J,CARRON C J,JENSEN B D,et al.Plastic latching accelerometer based on bistable compliant mechanisms.Smart Mmaterials andsS Ttuctures,2007,16:1967-1972.
[16]ZHAO J,JIA J Y,WANG H X.A novel threshold accelerometer with postbuckling structures for airbag restraint systems.IEEE Sensors Journal,2007,7(8):1102-1109.
