基于DMD的红外场景仿真系统实验分析
2014-03-20何永强唐德帅胡文刚任宏岩
耿 达,何永强,唐德帅,元 雄,胡文刚,任宏岩
(军械工程学院电子与光学工程系,河北石家庄050003)
1 引言
近年来随着仿真技术的不断发展,利用红外场景仿真技术在室内环境下对红外成像系统进行性能测试成为研究热点。目前国内外典型的红外成像技术有以下几种:激光二极管、电阻阵列、液晶光阀、数字微镜阵列(DMD)等[1]。其中,基于DMD的红外成像技术具有灰度等级高、分辨率高、对比度强、能量输出集中、生成图像稳定、均匀性好、几何畸变小、可分辨温差小、寿命长等优点逐渐成为红外成像技术的主要发展方向。
帧频指单位时间内仿真系统转换生成动态图像的数量。实验中,由于DMD采用的是调制反射光,通过控制每个微反射镜反射光的时间长短来实现亮度的调节,只能与凝视面阵红外探测器匹配使用,因此只有在其积分时间内才对外部光能进行探测,其他时间不响应[2]。为了得到理想的仿真场景,探测器的积分时间与DMD显示帧频要同步,否则就会出现假信号、闪烁及图像混淆现象。本文通过分析DMD的工作原理,研究了基于DMD的场景仿真系统中,探测器积分时间与DMD显示时间不同步时,对于静态场景仿真和动态场景仿真的影响。
2 DMD工作原理
DMD器件是由美国德州仪器(TI)公司研制的,是数字光处理(DLP)系统的核心器件。每个DMD是由成千上万个可翻转的铝合金微镜组成,相当于投影图像中的一个像素点,通过快速、独立控制每个微反射镜的偏转角度,控制对光源光线的反射,实现图像信息的动态显示[3]。图1是用电子显微镜拍下的去除窗口的微镜阵列照片,这些微镜面具有不同的偏转角,呈现不同的状态。图2示出了两片DMD微镜片的倾斜状态。

图1 DMD芯片微镜阵列显微照片Fig.1 Micrograph ofmicro lens of DMD

图2 微镜片的工作状态示意图Fig.2Working state of Micro lens
由图2[4]可知,DMD像素单元只要由CMOS存储单元、转动铰链、镜架、反射镜和3个电极等几部分组成。
DMD是一种快速、反射式的数字光开关,通过微镜片的转动实现成像。图3[5]是DMD成像原理示意图。每个微镜片都有3种状态,即“开”、“平”以及“关”态,分别对应 +12°、0°和 -12°。将投影透镜置于微镜片的中垂线上,当微镜片未偏转时,光源发出的入射光被微镜反射,反射角为24°,偏离投影系统。当微镜片偏转+12°时,经微镜片反射的入射光几乎全部通过投影系统,在屏幕上对应的像素点成亮态。当微镜片偏转-12°时,反射光线偏离投影系统,此时对应的像素点成暗态[4]。因此,通过控制微镜片的3种状态,就能控制每个像素点的亮暗,从而生成一幅图像。
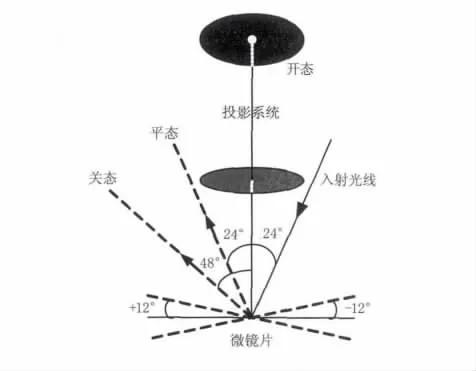
图3 DMD工作原理示意图Fig.3Working principle of DMD
3 DMD的灰度调制技术
为了使DMD投影出的图像含有更丰富的信息且更逼真,就需要进行灰度调制。灰度调制的基本原理是人眼在空间上对分辨率不敏感和在时间上存在“视觉暂留”的特性。灰度调制方法主要有空间灰度调制、帧灰度调制和脉冲宽度调制等[4]。由于空间灰度调制和帧灰度调制在提高灰度等级时都存在一定的局限性,而脉冲宽度调制不存在这种问题。因此,基于DMD的动态场景仿真系统采用脉冲宽度调制。
脉冲宽度调制技术(PWM)是指在探测器积分时间内,DMD根据驱动电路输入的脉宽信号,调节微镜片的3种状态所占图像一帧时间的百分比来实现对应像素的数字控制。图像数据的最高有效位(MSB)对应的位时间最长,最低有效位(LSB)对应的位时间最短。以10进制数的4 bit灰度图像为例,它具有24个灰度等级。把一帧时间分为4个位时间,每个位时间的长短与它的二进制权值成正比,即从 LSB 到 MSB 的位时间依次为 20、21、22、23,且对应的时间间隔为1/15、2/15、4/15、8/15。其二进制数表示为1010,在MSB和MSB-2的位时间上,DMD微镜片处于“开”态,镜片偏转 +12°;在MSB-1和LSB的位时间上,DMD处于“关”态。镜片偏转-12°[6]。图4示出了4 bit图像的二进制脉宽调制示意图。同样,可以实现8 bit,12 bit等更高的灰度等级,主要取决于每帧图像的场时间和镜片转动的响应时间。

图4 4 bit脉冲宽度调制示意图Fig.4 Pulse width modulation of4 bit
4 仿真系统实验分析
由于DMD灰度等级控制采用的是脉宽调制技术,通过调节微镜片在“开”态和“关”态所处的时间来成像的,因此只能与凝视面阵红外探测器匹配使用,且探测器的积分时间等于DMD显示时间,同时二者之间实现严格的帧同步。如果PWM调制与探测器积分时间不同步,则会导致时间混淆现象,这是系统设计中必须解决的问题。传统的解决办法是从探测器外接一路同步信号,连接到DMD驱动电路板,控制PWM显示,实现PWM与探测器积分时间的同步。图5所示加载同步信号后,积分时间与DMD显示时间的同步示意图。图中以数据为1、8、10的4 bit图像为例,当探测器探测到一帧图像时,向DMD驱动板发出一个同步信号,使积分时间和显示时间同步,从而得到完整清晰的图像。

图6 仿真系统实验电路板Fig.6 Circuit board of the simulation experiment

图5 加载同步信号下的脉宽调制示意图Fig.5 Pulse width modulation of loading synchronization signal
4.1 静态场景仿真
目前,根据实验室所具备的条件,仿真系统可以显示静态场景和动态场景。如图6所示,仿真系统实验电路板由上半部分的DMD驱动板和下半部分的视频板组成,来显示动态场景,DMD驱动板也可单独工作,显示静态场景。
在实验过程中发现在显示静态图像时,不外接同步信号且积分时间大于显示时间,调节显示帧频也会得到清晰完整的图像。如图7所示,当探测器积分时间为20 ms时,DMD分别在显示时间为10 ms、20 ms和25 ms图像的显示情况。

图7 积分时间为20 ms时的DMD图像Fig.7 Experiment images of DMD at Tint=20 ms
由图可以看出,图7(a)和图7(b)图像明显比图7(c)图像清晰完整。当探测器积分时间为30 ms时,调节 DMD显示时间,实验结果如图8所示,图8(a)图像明显比图8(b)图像清晰完整。

图8 积分时间为30 ms时的DMD图像Fig.8 Experiment images of DMD at Tint=30 ms
通过上述两个实验初步得出,DMD在显示静态图像时,不外接同步信号,调节DMD显示帧频,满足探测器积分时间是DMD显示时间的整数倍,就可以得到清晰完整的图像。
4.2 动态场景仿真
4.1节得到的结论只在静态场景仿真时适用,在动态场景仿真时,由于相邻两帧图像的信息不同,必须外接同步信号使探测器积分时间与DMD显示时间在同一时刻开始,否则就会出现图像混淆现象。由数据为1、8、10的4 bit连续三帧图像为例,当没有外接同步信号时,积分信号与驱动信号匹配关系如图9所示,在一段积分时间内包含了相邻两帧图像的内容,探测器得到的图像不是一幅包含全部信息的完整图像因此图像出现混淆现象;当外接同步信号时,如图10所示,积分信号与驱动信号在同一时刻触发且在同一时刻结束,探测器在每段积分时间内得到的是完整的一幅图像,消除了图像混淆现象。
为了准确、直观地验证在动态场景仿真时,未加同步信号会出现图像混淆现象,运用Flash软件制作了一段相邻两帧图像信息相差比较明显的视频,便于观察图像混淆现象。选取其中连续的四帧图像,如图11所示。

图9 未加载同步信号的脉宽调制示意图Fig.9 Pulse width modulation of not loading synchronization signal

图10 加载同步信号的脉宽调制示意图Fig.10 Pulse width modulation of loading synchronization signal
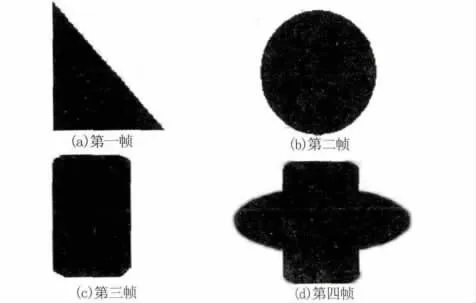
图11 选取视频中连续的四帧图像Fig.11 Select the four frame successive images
首先,不外接同步信号,设定探测器时间与DMD显示时间相同。探测器得到的与图11对应帧数的图像内容如图12所示。

图12 未接同步信号时探测器得到的图像Fig.12 The images ofmissed synchronization signal
观察上述实验结果可知,在未接同步信号的情况下,即使探测器积分时间与DMD显示时间相同,得到的图像不完整且相邻图像之间重叠。当外接同步信号时,得到的图像如图13所示。

图13 外接同步信号时探测器得到的图像Fig.13 The images of external synchronization signal
通过图12与图13对比可知,外接同步信号得到的图像完整且没有图像重叠现象。因此仿真系统进行动态场景仿真时,外接同步信号协调积分信号与驱动信号是非常有必要的。
5 结论
通过上述两个实验,得出系统在静态场景仿真时,不外接同步信号就可以得到清晰完整的图像,避免了外接同步信号改动电路的麻烦,易于工程实现。而动态场景仿真时,只调整探测器积分时间与系统显示时间不能消除图像混淆,只能外接同步信号。为了工程需要,研究一种不外接同步信号就能消除动态场景仿真中图像混淆的方法,成为下一步工作的重点。
[1] ZHANG Kai,SUN Li,YAN Jie.Design and test of infrared scene simulation based on the DMD [J].Infrared and Laser Engineering,2008,37(S2):369 -372.(China)张凯,孙力,闫杰.基于DMD的红外场景仿真器设计及测试[J].红外与激光工程,2008,37(S2):369 -372.
[2] KANGWeimin,LI Yanbin,GAO Weizhi.Dynamic infrared scene projector using a digital micro mirror device[J].Infrared and Laser Engineering,2008,37(5):753 -756.(China)康为民,李延彬,高伟志.数字微镜阵列红外动态景象模拟器的研制[J].红外与激光工程,2008,37(5):753-756.
[3] TANG Deshuai,HE Yongqiang,HUANG Fuyu.Study on dynamic infrared scene simulator technique based on DMD[J].Infrared technology,2012,34(8):476 - 481.(China)唐德帅,何永强,黄富瑜.基于DMD的动态红外场景仿真技术研究[J].红外技术,2012,34(8):476 -481.
[4] CHEN Jianhua,ZHU Ming,HUANG Detian.Dynamic infrared scene projection technology based upon digitalmicromirror device[J].Chinese Journal of Optics and Applied Optics 2010,3(4):325 -336.(China)陈建华,朱明,黄德天.数字微镜器件动态红外场景投影技术[J].中国光学与应用光学.2010,3(4):325-336.
[5] CAI Jianrong,YAN Gaoshi,LIUChangsong.Technology of creating DMD - based dynamic infrared image[J].Laser& Infrared,2008,38(4):338 -341.(China)蔡建荣,严高师,刘昌松.基于DMD的红外动态图像生成技术[J].激光与红外,2008,38(4):338 -341.
[6] ZHANG Jian,LI Mingzhuo,WANG Chunhui.Control method of image gray level of laser imaging radar DMD object simulation[J].Infrared and Laser Engineering,2006,35(S1):363 -367.(China)张健,李明卓,王春晖.激光成像雷达DMD目标模拟器图像灰度级控制方法[J].红外与激光工程,2006,35(S1):363-367.
