乒乓球捡球机器人的设计与实现
2014-03-17许东伟刘建群林淦
许东伟,刘建群,林淦
(广东工业大学机电工程学院,广东广州510006)
随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。在这其中,服务机器人作为一个重要分支,在国内外研究领域已经得到普遍重视。服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作[1]。文中所述的捡球机器人,正是一种应用于乒乓球体育运动的自主式移动的服务机器人。
在乒乓球室里,由于训练或者比赛的时候,地面上将会有很多出界或者无效的乒乓球。如果由人工来捡球,将会造成效率低、工作量大等弊端。因此,如果能有一种捡球机器人应用于乒乓球场馆里,且能迅速找到球的位置并能够实现自动捡球的功能,将可以使人们摆脱一些繁琐的工作、大大减轻人们的劳动强度、提高人们的生活质量。
目前已有的乒乓球捡球机器人种类较少,且捡球动作的实现主要是通过机械手等机械装置来捡球[2]。这些捡球装置多因为机械机构的限制,对于位于墙角处和藏于障碍物之间的乒乓球不能有效捡取,因而只适用于障碍物较少且远离墙壁的乒乓球的捡取。
1 机器人结构设计
1.1 捡球原理设计与实现
乒乓球的直径为40 mm,质量为2.7 g,具有体积小、质量轻的特点,特别适合吸力装置吸取。风扇在转动时,抽风的一端会形成负压;如果将一个管道与风扇的抽风面相连接,则在风扇的作用下,管道内的气压将小于管道外的大气压,管道口附近的物体将在压力差的作用下被吸进管道里。因此,若采用由强力风扇与一个两端开口的管道组成的吸球管,乒乓球就可以顺利被吸取。
同时,为了提高吸球的效率与稳定性,可将吸球管道沿斜面布置,通过斜面减轻乒乓球向上运动所需的力。在风力作用下,若乒乓球在斜面上作瞬时纯滚动,其受力如图1所示,根据理论力学平衡方程:
(Fw-Gsinα)R=Mf
式中:Fw为风作用力,R 为乒乓球半径,Mf为滚动摩阻,则有[3-4]:

其中:CF为风力系数(球体取0.5)[5];ρ 为空气密度,在地球近地面环境,温度为20 ℃,标准大气压下,ρ=1.2 kg/m3;v 为风速;A 为迎风面积,A =πR2;δ 为滚动摩阻系数,取δ=5 mm。
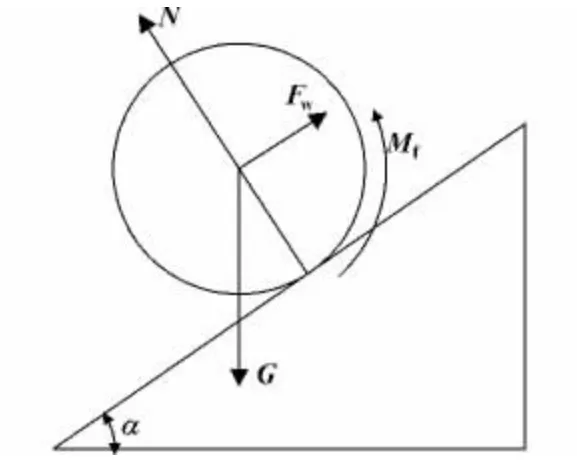
图1 乒乓球在斜面的受力情况
可以解得要使乒乓球顺利在斜面上向上滚动的最小风速为:

设吸球管管口最大面积为Smax,安全系数为k,则选用风扇的排量可以近似为:

1.2 吸球管设计
乒乓球的直径为40 mm,选用风扇的尺寸为50 mm×50 mm×28 mm,吸球管与水平的倾斜角度α =37°。为了提高捡球效率,将吸球口改为敞口设计。同时,考虑到敞口会降低吸球管的负压,增大乒乓球的吸取难度,敞口部分不宜过大。综合考虑各种影响因素,该捡球机器人的敞口尺寸设计为:最大敞口面积Smax=140 mm ×50 mm、敞口锥角45°,其设计效果如图2所示。

图2 吸球管前端敞口设计效果图
为了使被吸起的乒乓球能顺利落到装球腔内,在吸球管的末端设计有一个方形的出球口,并设计长度为20 mm 的轨道确保乒乓球的下落位置。出球口的设置,将不可避免地降低吸球管内的负压程度,增大球的吸取难度。于是,在出球口的末端,设计一个质量很轻的方形挡板(自复位挡板):平时在重力作用下,挡板会自动处于垂直位置,出球口为打开状态;当捡球风扇启动时,由于吸球管内的负压,挡板将在气压差作用下被吸起,覆盖在出球口上,从而提高吸球管内部的负压程度,确保吸球的有效性。吸球风扇关闭时,挡板自动打开,球也顺利落进装球腔。图3是出球口自复位挡板的示意图,图(a)是吸球风扇未启动时挡板位置的示意图,图(b)是吸球风扇启动时挡板位置的示意图。

图3 吸球管道出球口自复位挡板示意图
为了减缓乒乓球被吸起进入吸球管的阻力,在吸球管的前端设计了一个伸出板。伸出板是配合吸球管吸球的部分,对它的设计主要就是计算它距离地面的高度和伸出的长度:如果距离地面太近,可能会因为微小的起伏就导致伸出板与地面接触,不利于机器人的行走;如果距离地面太高,会出现伸出板挡住球运动从而捡不到球的情况,影响捡球的效果。在该设计中,伸出板的最前端距离地面高度为3 mm。
1.3 捡球机器人整体结构设计
乒乓球捡球机器人主要由车体、吸球装置、CMOS 图像传感器、装球腔、电机及其减速箱、系统电路板和锂电池等部分构成,图4 为捡球机器人的总体结构示意图。
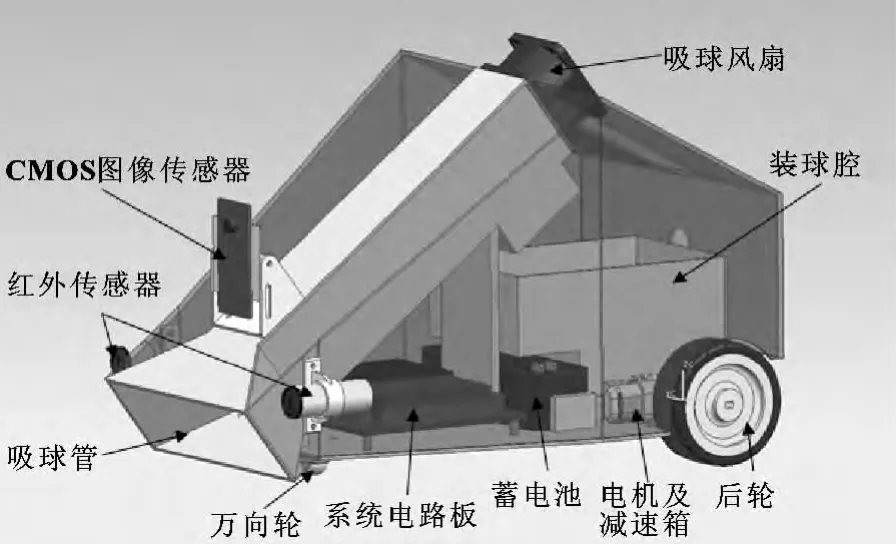
图4 捡球机器人总体结构示意图
捡球机器人的后轮由直流电机配套减速箱带动,通过系统的控制,可方便实现机器人的前进、左转和右转。机器人的吸球功能主要是通过控制连接吸球管的吸球风扇来实现的。当吸球风扇工作时,乒乓球将在负压作用下被吸进吸球管;吸球风扇停止工作时,在重力势能作用下,乒乓球会自动掉进装球腔。CMOS 图像传感器可以实时监测场地上乒乓球的位置,使机器人迅速到达乒乓球附近捡球。红外传感器可以使机器人有效躲避障碍物,增强机器人本身应变环境的能力。
2 机器人控制系统设计
捡球机器人的控制系统硬件框图如图5所示。
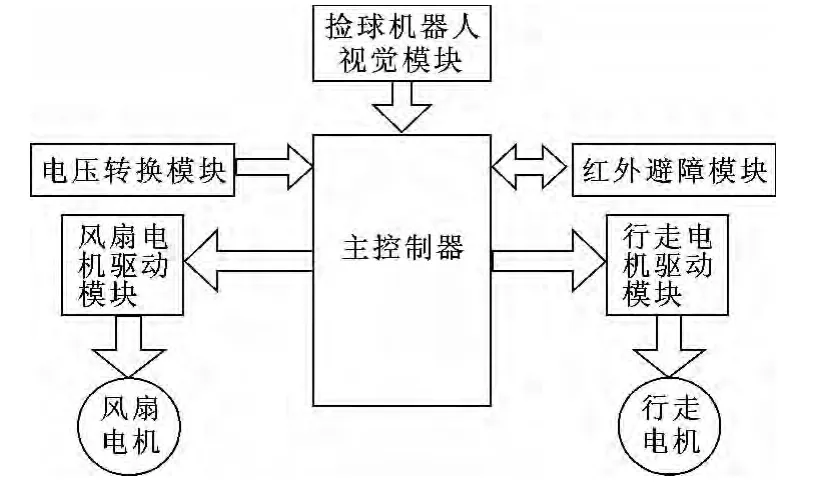
图5 控制系统硬件框图
其中,主控制器采用天嵌科技有限公司型号为TQ2440 的ARM 9 开发板来实现。该开发板采用S3C2440A 芯片作为CPU,具有功能齐全、运算速度快等优点。
2.1 电压转换模块设计
捡球机器人的吸球风扇的额定电压为12 V;机器人主控制器的输入电压为5 V;直流电机的额定电压也为5 V。可将主控制器模块与直流电机共用1 个电源,吸球风扇由于所需功率较大采用独立电源。
由于采用锂电池供电,为了保证主控制器能在额定电压下正常工作,需要外接一个稳压电路。较为常用的稳压电路是利用芯片进行调压[6]。该系统中运用的是三端集成稳压器LM7805 芯片进行调压。电源经LM7805 芯片的稳压后,可达到5 V 的要求,为主控制器和各芯片Vcc 端供电。考虑到锂电池的放电量较大及LM7805 在输出大电流时功耗较大、发热严重[7],采用两个LM7805 稳压芯片并联输出来降低单个芯片的功耗,防止芯片过热稳压失效。
根据吸球风扇的选择设计,吸球风扇的供电可直接采用12 V 锂电池,并通过继电器进行控制。
2.2 基于CMOS 图像传感器的乒乓球位置检测模块
CMOS 图像传感器凭借其高灵敏度、短曝光时间和日渐缩小的像素尺寸获得广泛的应用。所设计的捡球机器人视觉部分采用CMOS 图像传感器来感知周围环境并获取乒乓球的位置。在实际捡球过程中,可能机器人视野中会同时出现多个乒乓球,这时需要对所捕获的乒乓球位置数据进行处理,寻找出距离机器人最近的乒乓球所在位置进行捡球工作。CMOS 图像传感器(摄像头)的工作流程如图6所示。
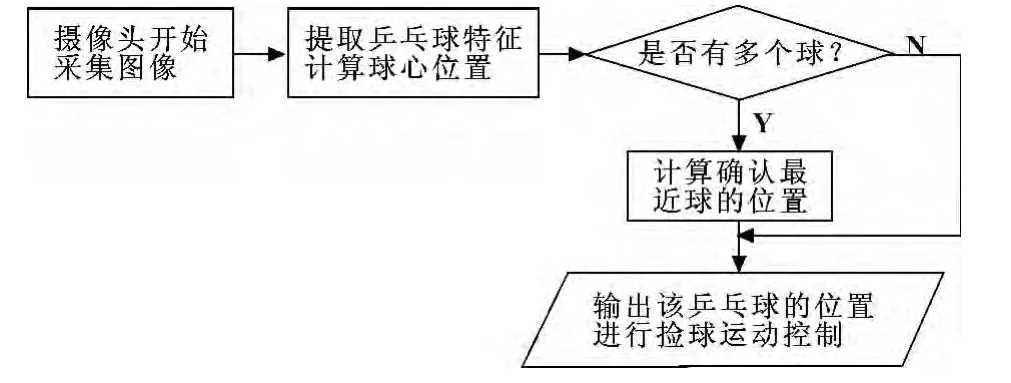
图6 CMOS 图像传感器的工作流程图
2.3 红外线传感器避障模块
红外线传感器抗干扰能力强,可以避免阳光和电灯等光线中红外线成分的干扰,且具有可见光的反射特性,常作为避障传感器使用。红外线传感器有内置的光滤波器,除了光敏二极管发出的红外线外,其它光线均不允许通过,这就保证了探测的准确性[8]。该捡球机器人采用距离可调节的NPN 型光电开关红外避障传感器,可检测距离为3 ~80 cm。捡球机器人的避障控制流程图如图7所示。
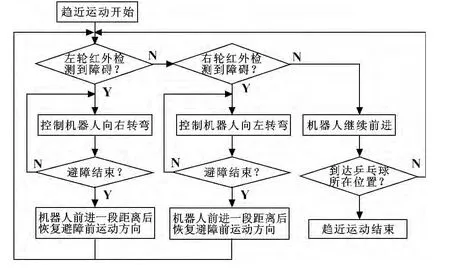
图7 机器人避障控制流程图
3 软件设计
软件设计是在ADS 开发调试环境下采用纯C 语言编程实现的,软件设计包括摄像头图像处理程序设计、外部中断红外避障程序设计、捡球动作程序设计。捡球机器人的软件流程如图8所示。
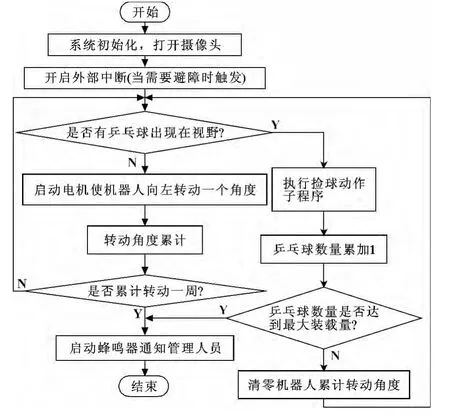
图8 捡球机器人的软件流程图
4 实验
经过捡球原理与机械结构的设计,最终完成的捡球机器人实物模型如图9所示。

图9 捡球机器人实物模型
4.1 捡球机器人的调试
机器人整体装配过程中,需要对摄像头的安装角度进行设定,确定摄像头的有效视觉范围。所设计的捡球机器人摄像头的安装角度为俯角5°,有效视觉范围为一个扇形,最远处可达2.4 m,也即机器人具有2.4 m 的前瞻性。摄像头的调试主要是根据实际安装位置和环境光照强度,对程序中乒乓球的识别阈值进行修正。为了更有效、便捷地调试,设计了以下调试过程:
(1)将摄像头捕捉到的影像传送到一块触摸屏上,并在机器人前方有效视野范围内放置乒乓球。乒乓球的位置需要合理分布,使捕捉到的影像中的乒乓球分为7 组:中间近距离球、中间中距离球、中间远距离球、左下方球、右下方球、左上方球、右上方球。乒乓球的位置如图10所示。

图10 测试过程中乒乓球的放置位置
(2)根据分组状况,在显示屏上各个位置的乒乓球区域上取点读取颜色值,并记录数据。
(3)根据实验数据,调整程序中图像识别部分的乒乓球识别阈值。
4.2 捡球机器人的运行结果
捡球机器人的初步调试工作完成,即可将程序打包烧录到主控制器的FLASH 中,实现机器人的脱机运行。运行时需要对机器人的捡球效果进行测试:分别在机器人近距离处的正前方、左前方、右前方,远距离的左方、右方、中间各放置一个乒乓球,依次检查机器人在不同球分布位置不同条件下的捡球动作执行效果;将机器人周边的球取走,检查机器人在找不到球的情况下的动作执行效果。
完成以上测试后,确认机器人捡球程序各参数设置的合理性后,即可进行机器人实际运行测试:在机器人周边随机放置若干乒乓球,启动机器人,查看捡球动作的执行与捡球的效果。
经过几次实际运行测试结果表明,机器人可以顺利完成捡球动作,基本可以顺利捡取所有的乒乓球。但同时也由于缺乏有效的路径规划机制,某些乒乓球的位置可能成为机器人的视觉死点位置,从而不能被顺利捡取。部分实验效果如图11所示。

图11 实验效果图
5 结论
提出了一种通过风扇产生的吸力来实现捡球的机器人,通过对实物模型的测试表明,该捡球机器人捡球效果良好。并且,在机械设计上,采用出球口自复位挡板及敞口设计,使得捡球效果更加显著。同时,由于采用ARM 9 开发板作为主控制器,控制系统的可拓展性高,系统功能的可优化空间较大。该研究结果对开发捡球机器人具有较好的应用价值。
【1】徐德,邹伟.室内移动式服务机器人的感知、定位与控制[M].北京:科学出版社,2008:1-3.
【2】安丹阳.新型自主式乒乓球捡球机器人的构形及关键技术研究[D].沈阳:东北大学,2008.
【3】徐华舫.空气动力学基础(上)[M].北京:北京航空学院出版社,1987.
【4】崔桂香,张兆顺.流体力学[M].北京:清华大学出版社,1999.
【5】江洁.内外驱动兼备的球形机器人设计及性能分析[D].西安:西安电子科技大学,2010.
【6】张道德.单片机接口技术(C51 版)[M].北京:中国水利水电出版社,2006.
【7】郭天祥.新概念51 单片机C 语言教程:入门、提高、开发、拓展全攻略[M].北京:电子工业出版社,2009:494-500.
【8】雷鹏飞,沈华东,高坎贷,等.红外传感器在智能车避障系统的应用[J].电脑与信息技术,2010,18(4):52-53.
