不同道路线形下驾驶人认知分散状态监测
2014-03-14金立生牛清宁刘景华秦彦光吕欢欢
金立生,牛清宁,刘景华,秦彦光,吕欢欢
注意力分散是引起道路交通事故的重要因素,研究表明,10%~20%的交通事故与注意力分散状态有关[1]。随着车载信息系统(In-vehicle infor mation systems,IVISs)的不断增加,这一现象日趋严重[2]。因此,对驾驶人认知分散状态进行实时、有效的监测对避免交通事故的发生有重大意义。本文在分析注意力分散类型和监测方法的基础上,采用支持向量机进行了不同道路线形(直道、弯道)下的驾驶人认知分散状态监测研究。
1 注意力分散
视觉分散(Looking away from the road way)和认知分散(Being lost in thought)是两种主要的注意力分散类型[3]。
1.1 注意力分散监测方法
视觉分散是指驾驶人视线偏离前方道路,可以利用驾驶人注视前方道路的时间和频率进行监测,目前基于驾驶人生理反应特征监测方法最为常用,主要特征参数包括:头部位置、面部朝向、眼部运动特征(扫视、注视等)。Kircher等研究发现,驾驶人1分钟时间内注视道路中心比例少于58%,则表示驾驶人出现视觉分散状态[4]。采用此类监测方法可对驾驶人视觉分散进行有效识别。
认知分散是指驾驶人将注意力转移至与正常驾驶无关的其他任务(例如脑中进行路线规划、较深度思考问题等)上,相对于视觉分散,认知分散对驾驶行为影响复杂,Strayer等研究发现驾驶处于认知分散状态时,正常驾驶行为就会受到影响[5]。而Blanco等研究结果表明,只有当驾驶人同时进行两个以上的决策任务时,正常驾驶行为才受到影响[6]。由于认知分散无固定的外在表现形式,对驾驶行为影响复杂多变,致使监测难度增大[7-8]。监测驾驶人眼部运动特征(扫视、注视等)也是目前常用的认知分散监测方法,基于该监测方法,不同学者得出了不同的结论。Recarte等研究发现,随着认知分散程度的增加,驾驶人注视范围越来越窄[9],而Reyes等却得出了相反的结果,即注视范围越来越宽[10]。基于驾驶人眼部运动特征的方法不能准确监测驾驶人认知分散状态。同时,驾驶人眼部运动特征主要依靠机器视觉提取,存在易受遮挡,和受光照条件、汽车振动的影响,鲁棒性较差。基于驾驶行为特征的检测方法,特征参数(车速、方向盘转角等)容易提取,不受光线、天气等外部环境影响,数据处理算法简单,实用性高,不影响驾驶人的正常驾驶[11]。因此,本文提出利用驾驶行为特征进行驾驶人认知分散状态监测。
1.2 注意力状态监测影响因素
注意力分散状态监测受个人驾驶习惯影响程度如图1所示。图1(a)表明不同驾驶人在视觉分散状态下表现出类似的驾驶行为特征,且与正常驾驶行为特征存在明显差异。因此,可以利用驾驶行为特征之间差异性监测驾驶人的视觉分散状态,同一监测模型可适用于不同驾驶人。图1(b)表明同一驾驶人在认知分散与正常驾驶状态之间存在一定差异,但不同的驾驶人在认知分散状态下驾驶行为特征没有一致规律性。因此,虽然可以利用驾驶行为特征之间差异性对驾驶人的认知分散状态进行监测,但该监测模型仅适用于同一驾驶人,不同的驾驶人需要建立相对应的认知分散状态监测模型[8]。
Liu等研究了复杂城市道路和简单乡村道路及道路场景变化对驾驶行为的影响[12],研究表明道路环境因素(高速公路、城市道路、乡村道路)同样是影响注意力状态监测的主要因素之一[12-13]。本文重点研究不同道路线形对认知分散状态监测的影响。

图1 个人驾驶习惯对注意力分散状态监测的影响Fig.1 The detection result affected by different driving style
2 模拟驾驶实验
模拟驾驶实验是目前进行注意力状态监测的主要方式[10-11]。招募12名驾驶人,在驾驶模拟器上采集正常驾驶和认知分散状态下的实验参数,实验场景选择高速公路场景。
2.1 驾驶模拟器
采用自行开发的奔腾B50驾驶模拟实验平台进行驾驶模拟实验,驾驶行为参数直接从模拟器的CAN-Bus中读取,采样频率选择10 Hz。图2所示为驾驶模拟器。

图2 驾驶模拟器Fig.2 Driving si mulator
2.2 实验驾驶人和实验场景
招募12名具有合法驾照的驾驶人(女:5名,男:7名),年龄21~30岁。针对实验要求,运用Multigen Creator和Vage自行设计的高等级公路场景,该场景由直路和多种曲率逐渐变化的弯道交替连接而成,双向4车道,单车道宽3.75 m,中间隔离带宽3 m,车速限制80~120 k m/h。
2.3 实验过程
整个实验过程分为三个阶段进行:①模拟器适应阶段;②正常驾驶阶段;③认知分散阶段;每个阶段耗时35~45 min,每个阶段结束之后休息5 min。模拟器适应阶段主要是让实验驾驶人熟悉驾驶模拟器和对应的高速公路场景。在正常驾驶阶段和认知分散阶段采集所需的实验数据。
2.3.1 正常驾驶阶段
驾驶人按照个人驾驶习惯正常驾驶模拟器,在该阶段,尽量避免驾驶次任务的影响。同时,对不同道路线形(直道和弯道)驾驶行为参数分别进行采集,数据记录人员随机选择10个弯道和直道进行驾驶行为数据采集。每次记录1 min,不同道路线形(直道和弯道)各采集6000组数据作为正常驾驶行为的原始参数。
2.3.2 认知分散阶段
该阶段,驾驶人在驾驶模拟器的同时被要求回答实验人员的提问,主要是智力测试问题,包括:逻辑推理题、数字记忆题等。数据记录人员主观判断,当驾驶人思考并回答实验人员的提问时即认为出现认知分散状态,开始采集认知分散状态下的驾驶行为参数。此过程中对直道和弯道分别进行采集,每次采集的时间间隔根据驾驶人的精神状态而定,直到对不同道路线形(直道和弯道)各采集足够的(>6000组)驾驶人认知分散状态下的驾驶行为原始参数,该阶段耗时较长。
2.4 驾驶行为原始参数
采集的驾驶行为原始参数包括:车速、加速度、方向盘转角、方向盘转动角速度、油门踏板位置和车身横摆角速度。
2.5 参数分析
图3所示为直线型道路条件下,驾驶人在清醒状态和认知分散状态时的驾驶行为及车辆特征参数曲线图。
由图3可知,驾驶人处于认知分散状态时,驾驶行为及车辆特征参数与正常状态下存在显著差异。弯道条件下也得出了同样的结论。
3 认知分散状态监测模型
3.1 支持向量机
认知分散与驾驶行为参数之间存在复杂的非线性关系,可以采用支持向量机建立认知分散状态分类监测模型。支持向量机现已成为机器学习和数据挖掘的标准工具之一,被广泛应用于模式识别等领域,图4所示为二维可分情况下支持向量机的分类结果。
3.2 特征参数组
为了充分反映不同注意力状态下驾驶行为的变化,对采集的6维驾驶行为参数进行统计分析,包括均值及方差,得到一组12维特征向量,作为支持向量机模型的输入。
3.3 时间窗
时间窗是进行特征参数组统计分析的时间间隔,为了提高监测系统的实时性,选择时间间隔为1 s。每位驾驶人在不同注意力状态(正常驾驶和认知分散),以及不同道路线形(直道和弯道)条件下分别有600组训练集进行模型的训练和测试。
3.4 模型训练
在支持向量机中,采用不同的核函数将形成不同的算法。目前常用的核函数主要有线性函数、多项式函数、径向基函数和多层感知机等。其中径向基函数是最常用的核函数:式中:xi、xj为特征向量。

径向基函数中存在两个待定参数:参数γ、惩罚参数C。采用网格寻优的方式选择 (C,γ)。其中,(C,γ)按公式(2)计算,根据所交叉检验的结果确定函数表达式。
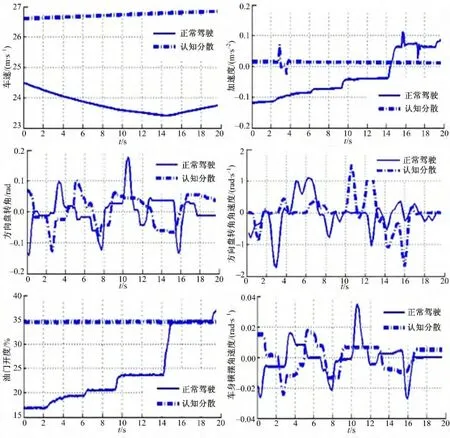
图3 正常驾驶与认知分散状态下驾驶行为参数变化Fig.3 Change of driving perfor mance in different driving state
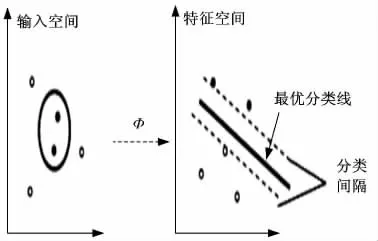
图4 二维可分情况下的最优分类结果Fig.4 Classification result in 2-D space using SVM

3.5 模型评价函数
经常使用的三个模型评价函数为:准确度Accuracy、灵敏度Sensitivity、特异度Specificity,计算公式为:
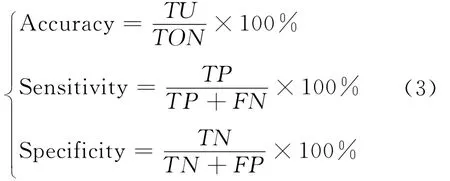
式中:TU 为正确检测样本数;TON 为总样本数;TP,FP,TN,FN 的定义见表1。

表1 灵敏度、特异度相关定义Table 1 Definition of Sensitivity and Specificity
4 结果分析
针对每一驾驶人,分别建立不同道路线形(直道和弯道)下的驾驶人认知分散状态监测模型,并随机选择100组测试集对建立的监测模型进行评价分析,其结果如表2所示。从表2中可以看到不同驾驶人之间存在一定差异。
不同道路线形下所有驾驶人监测模型的平均结果如图5所示,其中直道检测准确度为88.58%,灵敏度为93%,特异度为84.17%;弯道检测准确度为81.25%,灵敏度为84.08%,特异度为78.42%;在不区分道路线形情况下检测的平均准确度为74.17%,灵敏度为70.67%,特异度为77.67%。

表2 认知分散模型监测结果Table 2 Predict result of the cognitive detection model %
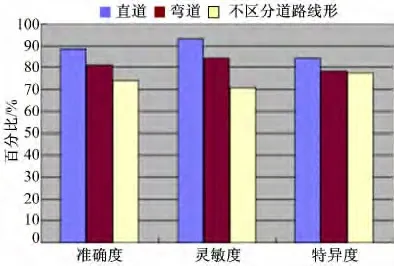
图5 不同道路线形下的平均监测结果Fig.5 Mean predict result in different road lines
由监测结果可见,采用驾驶行为特征的监测方法可以实时、有效地监测驾驶人认知分散状态的准确度、灵敏度、特殊度,其监测结果受道路线形条件影响。在不同道路线形下分别进行监测,准确度为:直道88.58%,弯道81.25%,该结果高于采用同一模型不区分道路线形直接进行监测的准确度74.17%。同时不同驾驶人驾驶风格之间也存在一定差异。
5 结束语
在系统分析不同注意力状态和监测方法的基础上,以驾驶模拟器为实验平台,针对不同道路线形(直道、弯道),分别采集了正常驾驶和认知分散状态下驾驶的行为参数;采用支持向量机建立了不同驾驶人、不同道路线形条件下的认知分散状态监测模型;得出了认知分散状态监测的影响因素。为进一步开展驾驶人认知分散状态监测研究和未来系统应用奠定了基础。
相对于直道,当处于弯道时,驾驶人驾驶更加谨慎,驾驶行为变化不明显,因此识别准确率较低。建立完善多特征参数组,并依据不同驾驶习惯和道路环境因素等进行选择调整,从而建立适应多驾驶人、不同道路线形的驾驶人认知分散状态在线自学习监测模型是下一步的研究重点。
[1]Bergasa L,Nuevo J,Sotelo M,et al.Real-ti me system for monitoring driver vigilance[J].IEEE Transactions on Intelligent Transportation Systems,2006,7(1):63-77.
[2]Woll mer M,Blaschke C,Schindl T,et al.Online driver distraction detection using long short-ter m memory[J].IEEE Transactions on Intelligent Transportation Systems,2011,12(2):574-582.
[3]Jin L S,Niu Q N,Hou H J,et al.Driver cognitive distraction detection using driving perfor mance Measures[J].Discrete Dynamics in Nature and Society,2012,2012:1-12.
[4]Kircher K,Ahlstr om C,Kircher A.Co mparison of t wo eye-gaze based real-ti me driver distraction detection algorith ms in a s mall-scale field operational test[C]∥Proc 5th Int Driving Sy mp Human Factors Driver Assess ment,Train Veh Des,2009:16-23.
[5]Strayer D L,Drews F A,Johnston W A.Cell phone-induced failures of visual attention during si mulated driving[J].Jour nal of Experi mental Psychology:Applied,2003,9(1):23-32.
[6]Blanco M,Biever W J,Gallagher J P,et al.The i mpact of secondary task cognitive processing demand on driving perfor mance[J].Accident Analysis and Prevention,2006,38:895-906.
[7]Haigney D,Wester man S J.Mobile(cellular)phone use and driving:A critical review of research methodology[J].Ergonom,2001,44(2):132-143.
[8]Liang Yu-lan.Detecting driver distraction[D].Lowa:College of Industrial Engineering,University of Lowa,2009.
[9]Recarte M A,Nunes L M.Mental workload while driving:Effects on visual search,discri mination,and decision making[J].Jour nal of Experi mental Psychology:Applied,2003,9(2):119-137.
[10]Reyes M L,Lee J D.Effects of cognitive load presence and duration on driver eye movements and event detection perfor mance[J].Transportation Research Part F:Traffic Psychology and Behavior,2008,11(6):391-402.
[11]李伟,何其昌,范秀敏.基于汽车操纵信号的驾驶员疲劳状态检测[J].上海交通大学学报,2010,44(2):292-296.Li Wei,He Qi-chang,Fan Xiu-min.Detection of driver's fatigue based on vehicle perfor mance output[J].Jour nal of Shanghai Jiaotong University,2010,44(2):292-296.
[12]Liu Yung-ching,Wu tsun-ju.Fatigued driver's driving behavior and cognitive task perfor mance:Effects of road environ ments and r oad envir on ment changes[J].Safety Science,2009,47:1083-1089.
[13]Horberry Tim,Anderson Janet,Regan Michael A,et al.Driver distraction:The effects of concurrent in-vehicle tasks,road environment complexity and age on driving perfor mance[J].Accident Analysis and Prevention,2006,38:185-191.
