Backstepping Adaptive Controller of Electro-Hydraulic Servo System of Continuous Rotary Motor
2014-03-14XiaoJingWangChangFuXianCaoLeiWanJinBaoZhaoLiWeiXiuAnCaiYu
Xiao-Jing Wang,Chang-Fu Xian,Cao-Lei Wan,Jin-Bao Zhao,Li-Wei Xiu,An-Cai Yu
(1.School of Mechanical and Power Engineering,Harbin University of Science and Technology,Harbin 150001,China; 2.School of Mechanical and Electrical Engineering,Harbin Institute of Technology,Harbin 150001,China; 3.Tianjin Research Institute of Construction Machinery,Tianjin 300409,China)
1 Introduction
Because of oil source pulsation,friction and leakage,a strong nonlinearity and external disturbance of electro hydraulic servo system,when the moving speed of continuous rotary electro-hydraulic servo motor is less than a certain value,the moving speed shows pulsation.Traditional control method is used to design controller by the approximate model,and the uncertain factors ignored in the design may cause the deterioration of the quality of control system.Therefore,the uncertainty of the object must be considered,so that the controller can also meet the design requirements when the system quality is damaged most seriously by uncertainties,thus the system performance can be improved.
Backstepping control has been widely used in the hydraulic field,but the hydraulic servo controller was designed withoutconsidering the change ofthe parameters[1],and only the friction problem of hydraulic system was considered[2].In order to solve the problem of the nonlinear uncertain factors,the effect of the change of system main parameters is considered in this paper.Because of the change of temperature,oil viscosity will be changed,and because of the change of load condition,the leakage coefficient of the system will be changed[3].In addition to the reason of servo valve design and manufacture,the gain also will be changed[4-5].According to the above characteristics, the backstepping adaptive control strategy of electro-hydraulic servo system of continuous rotary motor was put forward considering the adaptive law of the changed parameters.Finally,according to Lyapunov stability theorem,it is proved that the system reaches asymptotic stability under the designed controller.The effectiveness and feasibility can be proved according to MATLAB simulation, and backstepping adaptive controller overcomes the effects brought by uncertainty and the change of parameters,and effectively improves the system quality of the transition process.
2 Establishment of Mathematic Model
2.1 Linearization Flow Equation of Servo Valve Port

where QLis hydraulic servo-motor's load flow(m3/s); Kqis valve port's flow gain of servo valve(m2/s);Xvis servo valve spool displacement(m);Kcis servo valve’s flow-pressure coefficient(m3/(s·Pa));PLis load pressure(Pa).
2.2 Load Flow Continuity Equation of Hydraulic Motor
The load flow of hydraulic motor is composed of three parts:the flow that make the motor rotate,the flow of internal and external leakage losses,additional flow generated by the compressed oil,so

where Dmis the displacement of motor(m3/rad);θ is the angle displacement of the hydraulic motor(rad); Ctmis the total leakage coefficient of the hydraulic motor(m3/(s·Pa));Vtis total volume including the hydraulic motor, servo-valve chamber and the connected pipeline(m3);βeis effective volume elastic modulus of the oil(Pa).
2.3 Torque Balance Equation
According to Newton's Second Law,an equation can be drawn

where Jtis the total equivalent rotary inertia caused by the hydraulic motor and its load;Bmis viscous damping coefficient(N·m·s/rad);G is elastic stiffness of the load(N·m/rad);TLis the friction torque(N·m); θ is the actual displacement of continuous rotary motor servo system,as shown in Fig.1.

Fig.1 System block diagram of motor power mechanism with friction torque
2.4 Transfer Function of the Servo Valve
When the dynamics of the electro-hydraulic servo valve cannot be ignored for control system,it can be seen as one order inertial link or the oscillation part[6-7].When the dynamics of the electro-hydraulic servo valve can be ignored for control system,it can be seen as the proportional part:

Ksvis the gain of servo valve(m/A).The transfer function is defined as the proportional part.
2.5 Transfer Function of the Servo Amplifier
As the frequency band of servo amplifier is significantly higher than the hydraulic natural frequency,its dynamic influence on the system can be ignored. Its simplified proportional part is as follows[8].

where Kais the servo amplifier gain(A/V).
2.6 Transfer Function of Continuous Rotary Motor Electro-Hydraulic Position Servo System
The transfer function block diagram of electrohydraulic position servo system can be obtained by Fig.1 and Eqs.(1)to(5),as shown in Fig.2.
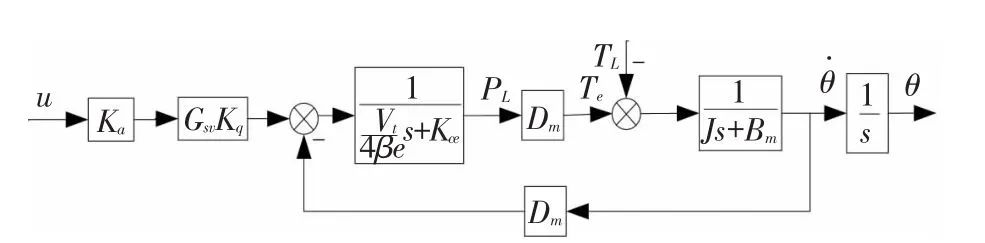
Fig.2 Block diagram of continuous rotary motor electrohydraulic position servo system
3 Backstepping Adaptive Controller Design Based on Adaptive Law of the Changed Parameters
The main idea of backstepping control is that the system is decomposed into several lower order subsystems,and the virtual control signal is designed for each subsystem from the final subsystem to the subsystem with system control input.The final control signal is obtained by a series of virtual signal in a recursive way.Every step of virtual signal recursion only needs to deal with a relatively simple error system which can choose the control signal more flexible,and effectively improve the system quality of transition process[9-13].
3.1 Subsystem Model
The whole system isdecomposed into three subsystems in this paper,and the construction process of each subsystem is as follows.
Output subsystem:θ represents system output which is the final control variable of system,its link regarded as the firstsubsystem ofbackstepping controller is output subsystem,so

The second subsystem:The input item ω of output subsystem is regarded as the input item of the second subsystem,and Eq.(3)can be deformed as follows:

The third subsystem:Load flow throttle formula of electro hydraulic servo valve is shown as Eq.(8)

where cdis flow coefficient;w is area-grads of servo valve(m),Psis oil source pressure(Pa);ρ is liquid density(kg/m3).
The input item PLof the second subsystem is regarded as the output item of the third subsystem,and it can be derived by Eqs.(8)and(2):

The servo valve is regarded as proportional component,and it can be derived by Eqs.(4)and (5):

where ks=KaKsv.
Form Eqs.(9)and(10),Eq.(11)can be obtained as follows:

Afterthe modelconstruction ofeach order subsystem of the electro hydraulic servo motor is completed,the backstepping adaptive controller can be designed.
3.2 Controller Design
Firstly,the output error of system should be designed,e1=θ*-θ,e2=^ω-ω,e3=^PL-PL;where θ*is the given output of system;^ω is the expectation value of velocity;^PLis the expectation value of load pressure.
3.2.1 Design of virtual control variable for output subsystem
θ is the final control variable of system,and ω is regarded as virtual control input,and it is assumed that θ*is third-order differentiable function,then


Virtual control is selected as follows

where f1is adjustment coefficient of the controller for output subsystem.f1>0.
It can be derived by plugging Eq.(14)into Eqs.(12)and(13).

3.2.2 Design of virtual control variable for the second subsystem
ω isregarded asthe outputofthe second subsystem,and PLis regarded as the input of the second subsystem,and the virtual controller can be designed for the second subsystem.The variable of virtual error is selected e2=^ω-ω,then



Controller is assumed as

where f2isadjustmentcoefficientofthe second subsystem controller,f2>0.
When the viscous damping coefficient changes as

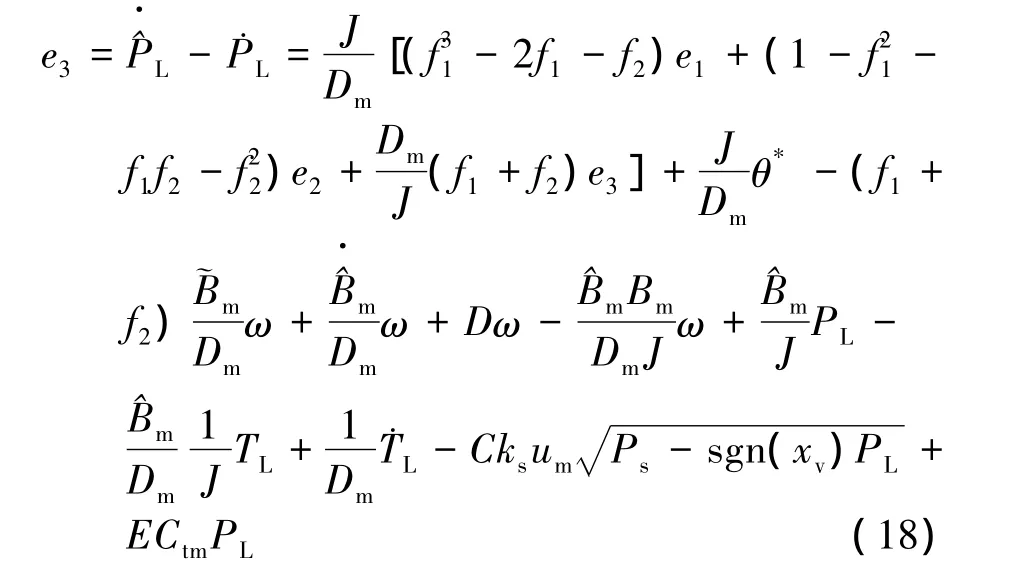
Then,it can be derived by plugging Eq.(17) into Eqs.(15)and(16):

3.2.3 Design of virtue control variable for the input subsystem
PLis regarded as the output of input subsystem,and umis regarded as the input of input subsystem,and the virtual controller can be designed for the third subsystem,The variable of virtual error is selected e3=-PL,then
Lyapunov's Functions is

where λ1,λ2and λ3are positive real numbers which are the adjustment coefficients of adaptive law respectively.Then

The final control variable is as follows:

The adaptive law of the changed parameters:

Eqs.(20)and(21)are the control input of the whole system, which contain margin of error interference of each subsystem within the system and adaptive estimation value of the changed parameters.
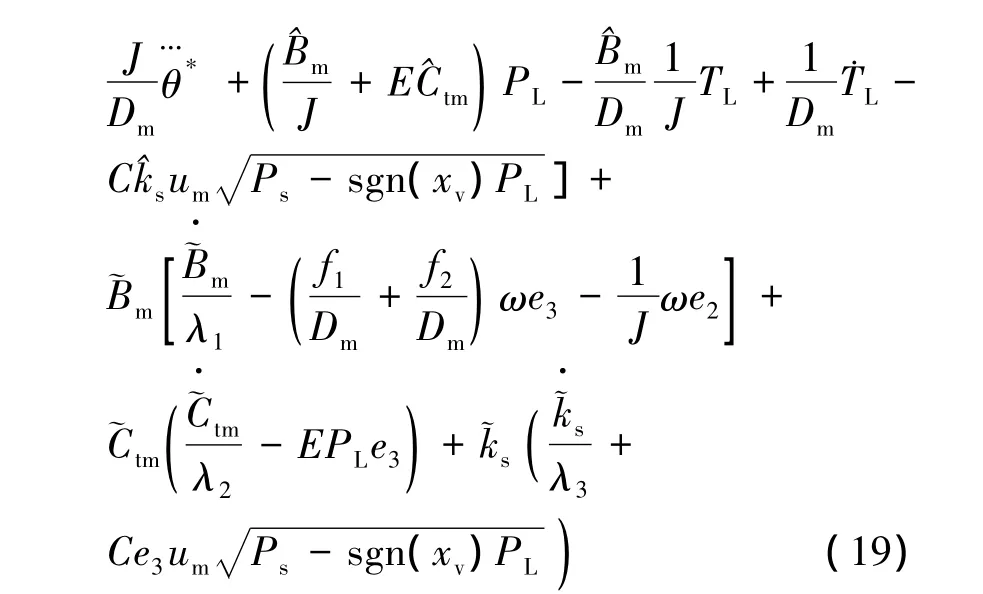
It can be derived by plugging Eqs.(20)and (21)into Eq.(19):

The final control input can be derived by simplifying Eq.(20)


where

In order to design the servo system controller conveniently and reflect the actual friction characteristicsofmotor,the simplified piecewise linearization model of the friction torque is adopted[14],and the expression is as follows:
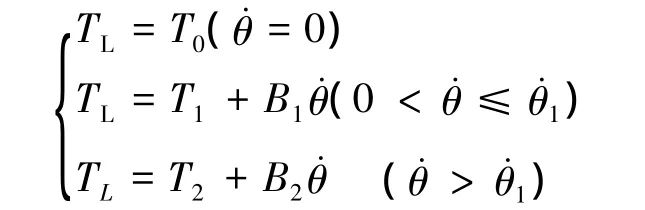
Eq.(23)is namely the designed backstepping adaptive controller of the nonlinear system,and the system block diagram is shown in Fig.3.

Fig.3 Nonlinear backstepping adaptive controller of continuous rotary motor
3.3 Proof of System Stability
Theorem 1 For the position tracking control of the backstepping adaptive control system of continuous rotary electro-hydraulic servo motor,the controller Eqs.(20)and(21)can make the system to reach the global asymptotic stability,at the same time,the system tracking error asymptotically tends to zero.
Proof (1)For the error variables e1,e2and e3,constructing Lyapunov's Functions V3≥ 0,the derivative of Lyapunov's Functions can be obtained by Eq.(22),˙V3≤0 then based on Lyapunov's stability theorem,the system control error is stable on the balance point.
(2)By the Barbalat lemma[15],as t→ ∞,so e1→0,e2→0,e3→0,error asymptotically tends to zero.
4 Simulations
System actuators are continuous rotary electrohydraulic servo motor.Its radian displacement is 1.2× 10-3m3/rad,and the oil pressure is 12 MPa,and the total effective volume of motor,servo valves and connecting pipe is 1.078×10-2m3,and the load inertia is 42.97 kg·m2,and the oil volume modulus is 6.9× 108N/m2,while hydraulic natural frequency is 92.63 rad/s and ξhis 0.1.The type of electro hydraulic servo valve is FF106-100,and ξsvis 0.6.Zero load flow of the servo valve is 1.2599×10-3m3/s,and flow gain is 0.0315 m3/(s·A).The saturated value of output control voltage for servo-amplifier is±10 V,and rated current of servo valve is 40 mA,and the gain of servoamplifier is 0.004 A/V,and flow coefficient is 0.61,and the area-grads of servo valve is 3.14×10-2m.
The simulations are based on the block diagram,as shown in Fig.3,and Fig.4 is the output tracking curve under the condition of sine signal with the amplitude 0.5°and the frequency 12 Hz.It is found that the Curve 1 represents the given signal,and the Curve 2 represents sine response signal of system with PID controller,and the Curve 3 represents sine response signalofsystem with the backstepping adaptive controller.Also,it can be seen that the system combined with backstepping adaptive controller can meet the requirements of dual-ten index and track the reference signal better.Fig.5 is the ramp signal with the system input signal 0.001°/s.The Curve 1 is the given ramp signal,and the Curve 2 is response curve of the backstepping adaptive controller based on the adaptive law of the changed parameters,and the Curve 3 represents system response signal with PID controller,and the Curve 4 and the curve 5 are the permitting position error-band respectively,and the error-band is±0.0005°.It can be seen that from the simulation results,the control method can meet the super low speed performance requirements,and the backstepping adaptive controller based on the adaptive law of the changed parameters has the advantage in the inhibition of friction, and makes the tracking performance of super low speed more perfect.

Fig.4 Sine response curves of system simulation

Fig.5 Ramp response curves of system simulation
5 Conclusions
The backstepping adaptive control strategy is put forward mainly considering the parameters Bc,Ctmand kschange of continuous rotary motor electro-hydraulic servo system,and the corresponding adaptive law is designed for the changed parameters.According to Lyapunov Stability Theorem,it is proved that the system reaches asymptotic stability under the control of the designed controller. Backstepping adaptive controller overcomes the effects brought by uncertainty and the change of parameters,and effectively improves the quality of the transition process.Exact position tracking performance of system can be obtained by the design of backstepping adaptive controller,and the influence of system parameters change on the system performance can be reduced effectively. The effectiveness and feasibility can be proved according to the simulation results with MATLAB.
[1]Ursu I,Ursu F,Popescu F.Backstepping design for controlling electro-hydraulic servos. Journal of the Franklin Institute,2006,343(1):94-110.
[2]Zeng H R,Sepehri N.Adaptive backstepping control of hydraulic manipulators with friction compensation using LuGre model.Proceedings of the 2006 American Control Conference.Piscataway:IEEE,2006.3164-3169.
[3]Cao Jian,Xu Hongguang.Friction characteristics of a new type of continuous rotary electro-hydraulic servomotor applied tosimulator.JournalofHarbin Instituteof Technology(New Series),2008,15(1):86-89.
[4] Wang Xiaojing,Shao Junpeng,Jiang Jihai.System identification and control of the electro-hydraulic servo system of a continuous rotary motor.Journal of Harbin Engineering University,2011,32(8):1045-1051.
[5]Wang Xiaojing,Li Jianying,Li Ping,et al.Electrohydraulic servo system identification of continuous rotary motor based on theintegration algorithm ofgenetic algorithm and ant colony optimization.Journal of Donghua University(English Edition),2012,29(5):428-433.
[6]Wang Chunxing.Hydraulic Servo Control System.Beijing: Mechanical Industry Publishing Company,1993.83-86.
[7]Li Jianying,Wang Yanwei,Wang Xiaojing,et al.Study of electro-hydraulic force servo system based on flow press servo-valve and fussy intelligent control strategy.Journal of Computational and Theoretical Nanoscience,2013,10 (12):2955-2960.
[8]Li Hongren.Hydraulic Control System.Beijing:National Defence Industry Press,1990.77-79.
[9]Dong Wenhan,Sun Xiuxia,Lin Yan.Adaptive backstepping control development and applications.Control and Decision,2006,21(10):1081-1086.
[10]Kanellakopoulos I,Kokotovic P V,Morse A S.Systematic design of adaptive controllers for feedback linearizable systems.IEEE Trans on Automatic Control,1991,36(11): 1241-1253.
[11]Pratap B,Purwar S.Real-time implementation of neuro adaptive observer-based robust backstepping controller for twin rotor control system.Journal of Control,Automation and Electrical Systems,2014,25(2):137-150.
[12]Shi Ye,Liang Bin,Xu Wenfu,et al.Adaptive backstepping trajectory tracking offree-floatingspace robots with prescribed transientperformance.Robot,2013,35(5):607-616.
[13]Chen Ning,Xiong Siqi,Liu Bo,et al.Adaptive backstepping control of permanent magnet synchronous motor chaotic system.Journal of Central South University (Science and Technology),2014,45(1):99-104.
[14]CaoJian.ResearchonContinuousRotaryElectro-Hydraulic Servo Motor and Its Performance Used in Simulator.Harbin:Harbin Institute of Technology,2002.48-49.
[15]Slotine J E,Li W P.Applied Nonlinear Control.London: Prentice Hall,1991.42-61.
杂志排行

Journal of Harbin Institute of Technology(New Series)的其它文章
- Influence of Punch Shape on the Fracture Surface Quality of Hydropiercing Holes
- Research on Cloud Manufacturing Resource-Aware and Access Technology Using RFID
- Simulation Platform of Underwater Quadruped Walking Robot Based on MotionGenesis Kane 5.3 and Central Pattern Generator
- Synchronization of High-order Discrete-time Linear Complex Networks with Time-varying Delays
- Numerical Simulation of High-Speed Water Entry of Cone-Cylinder
- Aerodynamic Characteristics of Projectile with Exotic Wraparound Wings Configuration