静止轨道碎片清除飞行器概念研究
2014-03-13赵启龙康志宇韩亮亮上海宇航系统工程研究所
赵启龙 康志宇 韩亮亮(上海宇航系统工程研究所)
静止轨道碎片清除飞行器概念研究
赵启龙 康志宇 韩亮亮(上海宇航系统工程研究所)
静止轨道是人类宝贵的空间资源,其间运行着众多通信、中继等高价值卫星,然而静止轨道上的空间碎片日益增多,占用了宝贵的静止轨道资源,严重影响在轨航天器的运行及未来静止轨道任务的实施。于是,一种用于静止轨道碎片清除的飞行器概念应运而生,这种碎片清除飞行器具有较强的自主、机动、承载能力,可实现对多个静止轨道空间碎片的清除。
1 引言
目前,静止轨道上运行着大约450颗卫星,而随着航天技术的不断发展,静止轨道将变得越来越拥挤;另一方面,静止轨道空间碎片有1200多个,主要包括运载火箭末子级或上面级、废弃卫星、卫星分离物及卫星爆炸或碰撞后产生的碎片,这些空间碎片占据了宝贵的轨道资源,不仅造成了资源浪费,而且严重影响在轨卫星的生存,对空间碎片进行在轨清除成为空间技术发展的重要趋势之一。
空间碎片清除技术包括被动清除技术和主动清除技术。被动清除技术主要利用地磁场、气动阻力等自然因素,在空间碎片上安装速度阻尼装置,使其缓慢降轨、离轨,并进入大气层销毁,这种清除技术主要适用于低轨空间碎片的清除;主动清除技术则是利用空间操控平台对空间碎片进行抓捕,并利用该平台的机动能力使其较快地改变轨道,达到清除的目的。为减少空间碎片对运行于静止轨道航天器的影响,需利用主动清除技术将其送入位于静止轨道上方的“坟墓轨道”,执行该任务的飞行器可以称为静止轨道碎片清除飞行器(以下简称碎片清除飞行器),它将是静止轨道空间碎片清除的一项重要技术手段,值得深入研究和发展。
2 国外相关飞行器发展概况
对碎片清除飞行器技术的研究,可以从在轨服务飞行器技术中汲取经验。美国开展了“轨道万能维修航天器”(SUMO)项目,目的是验证自主交会对接技术和不同卫星接口抓捕服务技术,该飞行器由机动能力强的推进模块、自主交会对接模块、抓捕载荷模块和平台模块组成。日本于2004年提出了“轨道维护系统”(OMS),用于卫星在轨监视、维护、营救及碎片的清理等任务。该系统主要用于研究空间机器人技术、观测监视系统的图像处理技术和自主交会技术。以德国为主,联合加拿大、俄罗斯等国共同开发的“用于验证空间系统的技术卫星”(TECSAS)项目,主要目的在于验证自主空间交会技术和自主在轨捕获技术,并希望将取得的技术成果应用到未来空间碎片清理的任务当中。
2001年,欧洲轨道复活公司发展的“轨道寿命延长飞行器”(OLEV)是用于静止轨道卫星救援的空间平台,带有离子推进系统。该飞行器发射质量1400kg,携带260kg氙气。其带有霍尔效应推进系统(HET),用于地球同步轨道变轨及自身和目标轨道保持,还可以将废弃卫星从静止轨道转移至“坟墓轨道”。
欧洲航天局(ESA)于2002年开始进行的“地球同步转移轨道重置机器人”(ROGER)计划,用于研究如何在静止轨道捕获非合作目标以及将其拖拽到“坟墓轨道”。该航天器在地球同步转移轨道向静止轨道转移过程中采用电推进的方式,预计速度增量约为2.25km/s,转移时间为190天,发射质量1450kg,入轨质量1250kg(干质量920kg)。
欧洲航天局、德国航空航天研究院(DLR)以及Kosmas Georing服务公司正在合作开展“赫尔墨斯”(Hermes)计划,包括一个“实用代理”飞行器,可为静止轨道通信卫星补给燃料,或为目标航天器安装一个火箭发动机实现再次推进入轨。
通过对国外在轨服务航天器技术发展的综合分析,对碎片清除飞行器提出如下技术要求:作为一种具有空间运输能力的飞行器,它具有一定的自主性、机动性和承载能力;为实现对目标的操控,该飞行器需要安装飞网、飞爪、机械臂及吸附机构等抓捕装置;为实现在高轨运行并对多个碎片进行清除,该飞行器需要提供较大的速度增量,携带较多推进剂。此外,电推进技术将会在碎片清除任务中得到采用,相对于传统化学推进系统,电推进系统可以提供更大的比冲,系统质量轻,但推力小,在干扰情况下的姿态控制能力弱,可以用于没有时间约束的变轨任务或轨道保持,但不适用于对非合作目标的捕获清除。

“通用轨道修正航天器”外观图
3 任务分析
经济性分析
碎片清除飞行器的目标为静止轨道废弃卫星,这类卫星多为大型空间平台,采用三轴稳定控制方式,失效后姿态和轨道变化很小,仍运行于原定点位置。由于碎片清除任务时间约束不强,飞行器从地球同步转移轨道转移定点于静止轨道后与目标位于同一轨道面内,采用自然调相共面交会捕获清除的方式可以有效地节省燃料。假设废弃卫星和碎片清除飞行器质量均为3000kg,则碎片清除飞行器平均每次任务的速度增量约80m/s,耗费燃料约160kg。考虑工程余量,携带1500kg常规化学推进剂能够实现对6颗静止轨道废弃卫星的清除。俄罗斯能源火箭航天公司总裁维塔利·洛波预计,每清理静止轨道一颗废弃卫星可以赚2000万~5000万美元,清除6颗静止轨道废弃卫星可以赚1亿~3亿美元。
清除模式分析

“轨道寿命延长飞行器”外观图

“实用代理”飞行器外观图
主动清除技术中,碎片清除飞行器捕获目标后,可与目标形成两种连接模式:刚性连接和柔性连接。刚性连接模式要求抓捕机构牢固稳定地与目标连接,对抓捕方式、抓捕机构和目标的抓捕位置均提出了较高要求,适用于对合作目标的操作,其主要抓捕机构为机械臂。刚性连接后,碎片清除飞行器与非合作目标形成组合体,由于抓捕位置随机性较强,组合体进行轨道机动时其姿态和轨道很难控制。为能够稳定地控制目标,抓捕前需对目标进行绕飞,选取抓捕位置;在近距离操控捕获目标后,碎片清除飞行器需对组合体进行质量特性测量,再选择合适的姿态和轨道控制方式,发动机喷气过程中还需避免目标对羽流的遮挡问题。因此,对非合作目标清除采用刚性连接模式,目标适应性不强,且难度巨大,不建议采用。
柔性连接模式是指碎片清除飞行器将抓捕机构发射出去,并通过绳索与其连接。由于绳索具有信息传输功能,飞行器可以通过绳索对抓捕机构进行导引控制,并接收其测量信息,主要抓捕机构为飞网、飞爪或吸附装置等。此类抓捕机构对目标的适应性强,飞行器捕获目标后通过绳索将其拖拽至“坟墓轨道”,再断开绳索返回静止轨道,携带多个抓捕机构能够实现对多个目标的清除。该模式对碎片清除飞行器的姿态和轨道控制影响相对较小,适合应用于非合作废弃卫星的清除任务。
功能需求
除了传统静止轨道卫星平台必备的功能(温控、抗辐射加固、测控及电源等)外,碎片清除飞行器还需具有以下功能:
1)轨道机动能力。碎片清除飞行器需要在静止轨道机动飞行,需要具有高轨机动能力,推力器布局复杂。
2)自主运行管理能力。为使碎片清除飞行器能够清除静止轨道上全区域的废弃卫星,降低地面操作成本,提升碎片清除的经济效益,飞行器需要具有自主运行管理能力,主要包括自主任务规划与管理和自主导航与控制能力,能够实现地面对任务指令的一次注入,飞行器自主完成对指定区域多个目标的清除工作。
3)携带组合式推进系统。由于时间约束性不强,为减轻质量,提升碎片清除能力,提高任务经济效益,碎片清除飞行器携带“电推进+液体双组元推进”组合式推进系统。在地球同步转移轨道段由电推进系统完成;静止轨道碎片清除任务由液体双组元推进系统完成,以提升清除过程中的姿态和轨道控制能力,并缩短碎片清除时间,尽快为后续卫星提供轨位。
4)承载能力。碎片清除飞行器需要完成地球同步轨道转移、静止轨道碎片清除等机动,携带推进剂量大,同时需要完成对大型卫星的拖拽控制,并安装多个抓捕装置,需要具有较强的承载能力。
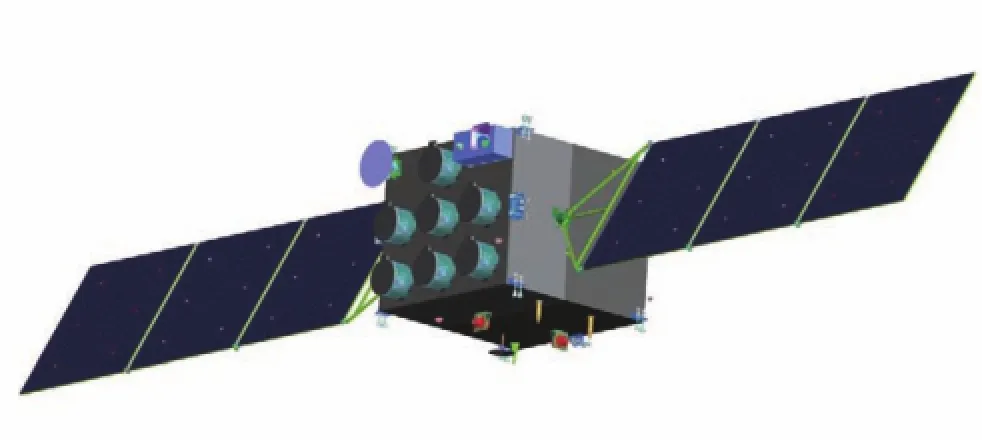
碎片清除飞行器构型方案
5)防撞能力。在对废弃卫星交会、抓捕和拖拽过程中,碎片清除飞行器需要避免与目标发生碰撞,始终监测与目标之间的距离,必要时采取规避措施。
4 飞行器总体方案
方案概述
碎片清除飞行器总质量3000kg,发射时尺寸3350mm×3000mm,采用“中心承力筒+箱板”式六面体构型,由结构与机构分系统,热控分系统,制导、导航与控制分系统,电源分系统,推进分系统,通信分系统,综合电子分系统,捕获分系统组成,飞行器将独立完成地球同步转移轨道变轨。

碎片清除飞行器布局方案
碎片清除飞行器在静止轨道的自主绝对导航采用惯导/GPS/天文组合导航方式,以天文导航为主。对地定向姿态确定采用陀螺和星敏感器联合定姿方式。对废弃卫星相对导航,采用相对导航设备的测量信息结合星敏感器、陀螺进行组合定姿。
碎片清除飞行器推进分系统采用“电推进+液体双组元推进”组合式推进系统,电推进系统200kg,化学推进剂1500kg,外部安装32台姿控发动机和1台大推力轨控发动机。
碎片清除飞行器综合电子分系统是其控制中心,对各系统运行状态进行检测和管控,协调分配任务。采用基于1553B总线的分布式网络结构,具有自主任务管理规划能力,由综合电子计算机,制导、导航与控制分系统下位机,电源下位机,热控下位机等部分组成。
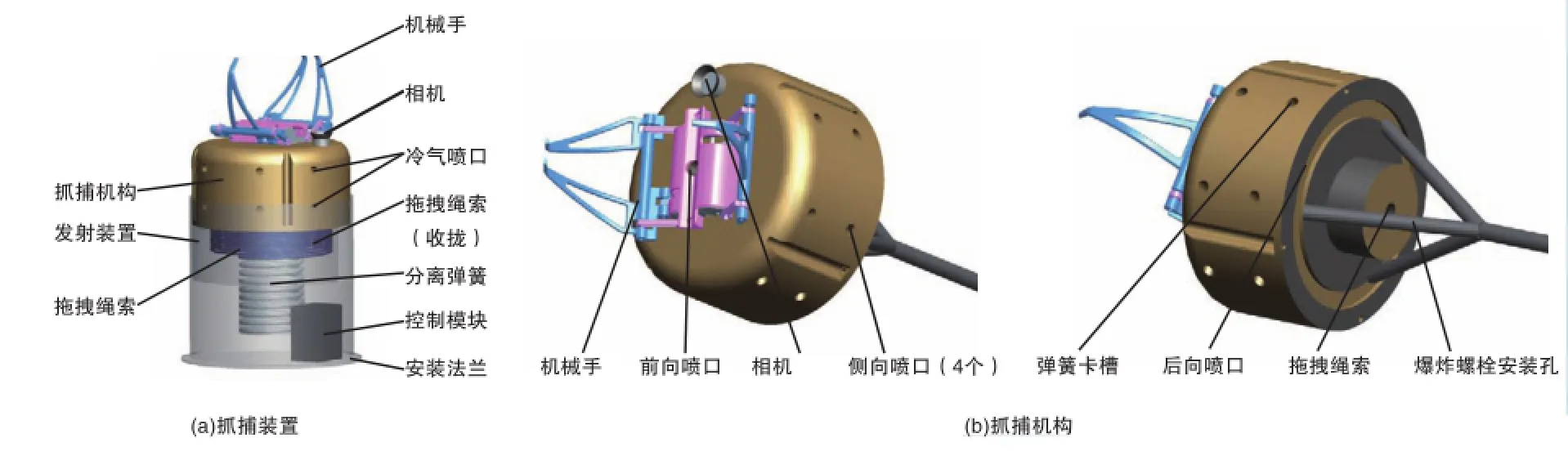
飞爪抓捕装置组成

机械手抓捕流程
碎片清除飞行器捕获分系统由4个飞爪抓捕装置和3个吸附抓捕装置构成,每个抓捕装置内部安装有控制模块和绳索系统,可以完成对多种目标的抓捕。
构型方案
碎片清除飞行器由抓捕载荷模块、平台模块和推进模块三部分组成。抓捕载荷模块位于飞行器前端,安装有7个抓捕装置发射器,每个发射器内部安装一个抓捕装置,通过冷分离方式将抓捕机构弹射出飞行器;平台模块集中安装飞行器各系统单机设备,为各系统提供支撑;推进模块包括常规推进模块和电推进模块,常规推进模块包括2个氧化剂贮箱、2个燃烧剂贮箱和2个气瓶,贮箱并联布局于平台四周,气瓶和电推进模块位于中心承力内部。
抓捕装置方案
碎片清除飞行器采用飞爪或吸附的方式实现对非合作废弃卫星的捕获连接,以下分别介绍飞爪抓捕方案和吸附抓捕方案。
(1)飞爪抓捕装置方案
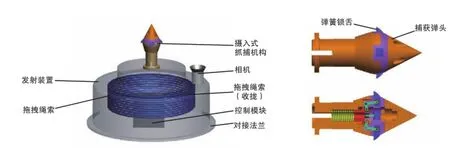
吸附抓捕装置组成
飞爪抓捕装置由抓捕机构、发射装置和拖拽绳索组成。抓捕机构总质量5kg,执行任务时从发射装置内弹出,内部安装冷气推进系统,装载0.5kg氦气,能够提供150m/s的速度增量,可实现姿态和轨道控制。前端安装可见光相机,用于发射前捕获目标和近程逼近时搜索目标上的抓捕位置。外部安装靶标,用于飞行器对其进行精确跟踪与测量。后端通过4个爆炸螺栓与发射装置连接。拖拽绳索用于连接抓捕机构和发射装置,在拖拽目标的同时,作为抓捕机构和飞行器之间的供电线路和信息链路为抓捕机构供电并传递遥测、遥控信息,其内部安装电缆,外层选用质量轻、柔韧性好、强度大的材料,并确保收拢时不产生静电,不容易缠绕。
飞爪抓捕机构前端的机械手由驱动机构、连杆机构和左右机械手等组成。抓捕开始时,机械手完全张开;当与目标小于一定距离、满足抓捕初始条件时,发出开始抓捕指令;机械手接到指令后,快速合拢,完成初始捕获;然后机械手缓慢回收,实现对目标的钩挂。
(2)吸附抓捕装置方案
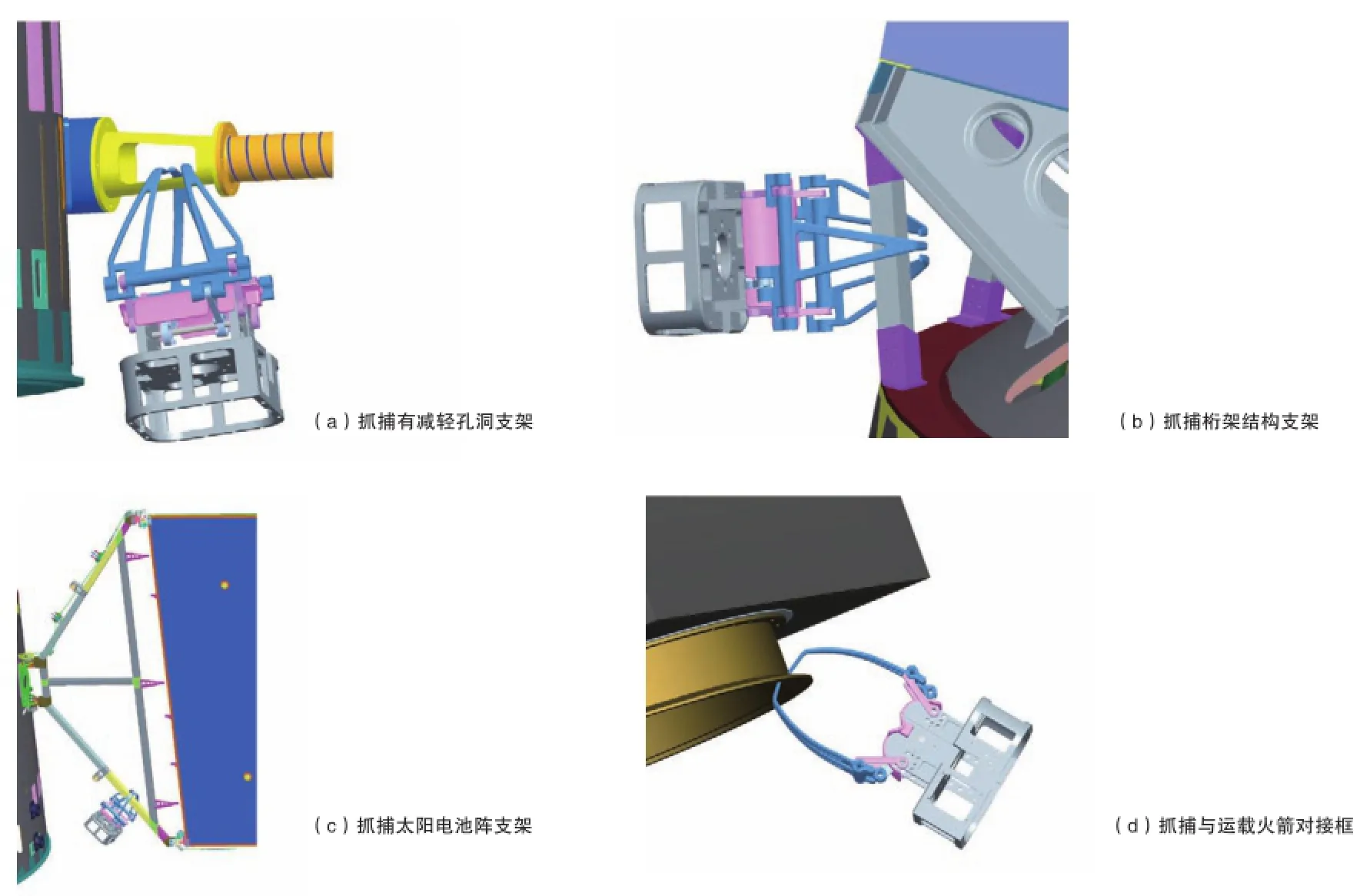
飞爪抓捕装置抓捕位置示意图
吸附抓捕装置由射入式抓捕机构、发射装置和拖拽绳索组成。射入式抓捕机构由捕获弹头、弹簧锁舌和壳体等组成,总质量不大于0.6kg,无姿态和轨道控制能力。每个捕获锁的头部采用高硬度和高强度的材料制成。整个抓捕过程如下:初始入射时弹簧锁舌张开,抓捕机构以一定速度飞向废弃卫星壁板并撞击射入;射入壁板过程中,弹簧锁舌被动压入壳体内;穿透壁板后,弹簧锁舌弹起到初始位置,此时可以实现对目标拖拽操作。
抓捕目标
(1)飞爪抓捕装置抓捕目标
对废弃卫星进行拖拽清除操作,无需机械手与目标刚性连接,只需确保在绳索拖拽方向上实现牢固地钩挂目标特定部位即可,根据机械手的结构形式,可以用于抓取废弃卫星上有减轻孔洞的支架、桁架结构支架、太阳电池支架或卫星上与运载火箭连接的对接框,这些部位一旦抓取即可拉动目标实现拖拽清除。
(2)吸附抓捕装置抓捕目标
箱板式构型是大多数卫星普遍采用的构型方案,射入式吸附抓捕机构的抓捕目标为箱板式废弃卫星的壁板,这类结构多为铝蜂窝芯夹层结构。地面试验表明,射入式吸附抓捕机构以10°入射角(入射方向与吸附面法向夹角)、2m/s相对速度碰撞铝蜂窝芯夹层结构时,可以穿透壁板,实现对目标的拉动清除。
5 结束语
静止轨道空间碎片对在轨卫星及未来空间任务构成了严重威胁,因此对其进行清除意义重大。通过对静止轨道废弃卫星清除任务的分析表明,空间机动操控平台技术是解决此问题的重要手段。碎片清除飞行器有望实现对多个废弃卫星的拖拽清除,且具有较强的目标适用性和一定的工程指导意义,为空间碎片主动清除技术深入研究提供支撑。
