基于模糊算法的多移动机器人目标跟踪
2014-03-12梁顺健汪俊彬邬依林
梁顺健,汪俊彬,邬依林
(1.华南理工大学 自动化科学与工程学院控制与优化中心,广州 510641;2.第二师范学院 计算机科学系,广州 510310)
目标跟踪控制是机器人学科的一个非常重要的问题,能够按给定的路径到达目标点是机器人必须具备的重要功能。由于存在噪声和干扰,移动机器人将不可避免地偏离期望路径。因此,如何控制移动机器人精确地跟踪路径是当今研究机器人的热点。围绕移动机器人跟踪控制问题,国内外学者进行了深入的研究[1-3],因此对机器人进行路径规划是很有必要的。由于多机器人系统在时间、空间和功能上有不同的分布特点和相互的协作关系,能够使机器人完成一系列复杂的任务。在复杂未知的环境中,不能建立精确数学模型的情况下,模糊控制具有重要的特性。
模糊逻辑控制算法将模糊控制本身所具有的鲁棒性与基于生理学的 “感知-动作”行为结合起来,为移动机器人精确跟踪路径提供了新的思路。该算法改善了传统算法对环境信息依赖性强的不足,对处理复杂环境下机器人路径跟踪控制问题,具有较强的优越性和实时性。
本文根据模糊逻辑控制得到一系列的控制规则,经模糊推理得到相应控制量,由此得到机器人局部路径规划信息,使机器人沿着分段的理想轨迹前进,最终使多机器人成功到达同一目标点,且通过实验验证了该方法的有效性。
1 定点目标跟踪策略
如图 1 所示,A(xo,yo)为移动机器人起始点,T(xr,yr)为终点,P(xk,yk)为机器人 tk(k=1,2,…,n)时刻坐标。
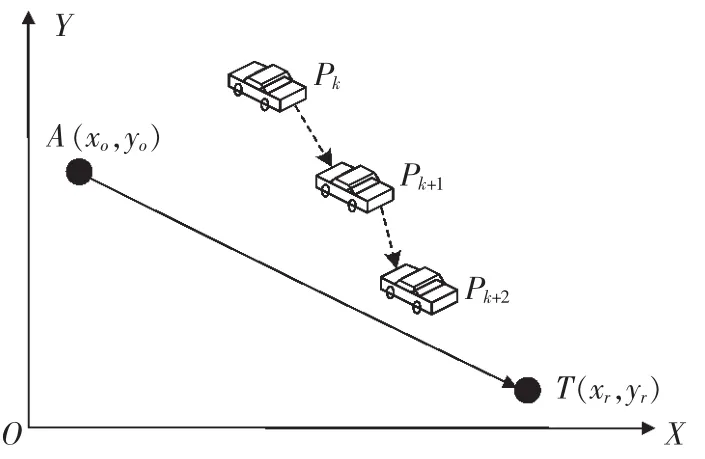
图1 机器人目标跟踪模型Fig.1 Model of robot target tracking
理想轨迹AT可由式(1)表示:

tk时刻机器人与AT的距离dk为


车式移动机器人具有高度非线性,强耦合,存在非完整约束等特点,这使得传统的线性控制方法很难精确控制机器人的跟踪轨迹[4],下面提出的模糊控制器设计能很好地解决以上所述问题。
2 模糊控制器的设计
模糊控制的基本原理可由图2表示,它的核心部分为模糊控制器[5]。
2.1 确立输入量和输出量及模糊语言描述

图2 模糊控制原理图Fig.2 Fuzzy control schematics
本文将误差E和误差的变化率EC作为输入,其中误差E表示车式移动机器人与理想轨迹间的距离,将移动机器人的舵机转角值φ作为输出,建立模糊控制器。采用简单的线性化处理方法,将误差E和误差变化率EC的模糊集定义为{NB,NM,NS,ZO,PS,PM,PB},分别表示{负大,负中,负小,零,正小,正中,正大},模糊论域均为[0,600]。 若把[-a,a]精确量 x 转化为[0,600]的离散量 y,则精确量的模糊化如下:

输出转角值φ的模糊集定义如下:{NBA,NBB,NBC,NB,NM,NS,ZO,PS,PM,PB,PBC,PBB,PBA},表示{左最大,左极大,左微大,左大,左中,左小,零,右小,右中,右大,右微大,右极大,右最大},论域[-60°,60°]。
2.2 确定输入输出量隶属度函数
取各个语言变量的隶属度函数形状为对称的三角形,且模糊分割时对称的误差E,误差变化率EC的隶属度函数如图3(a)所示;转角值φ的隶属度函数如图3(b)所示。
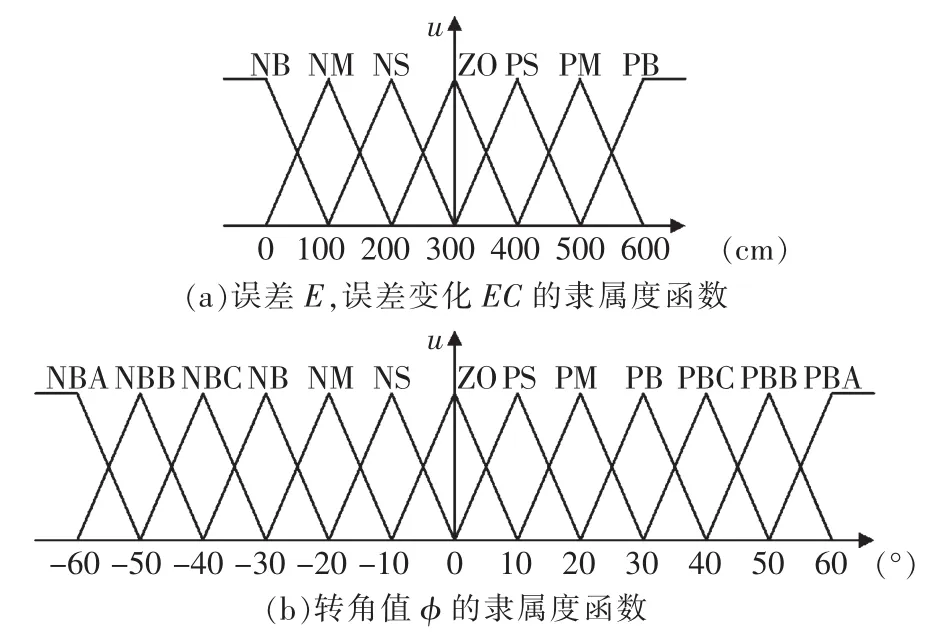
图3 隶属度函数示意图Fig.3 Schematic of membership function
2.3 模糊规则的建立
模糊控制规则的建立是模糊控制的核心问题。模糊控制系统是一系列基于专家知识的语言来描述的,用一系列模糊条件描述的模糊控制规则就构成了模糊控制规则库。根据FuzzySet理论,建立定性推理规则,模糊规则反映了输入输出量之间的关系[6]。
模糊控制规则表见表1所示,其总体制定思想是根据机器人当前位置误差值和航向姿态来确定转角关系,目的是使机器人能快速收敛于理想轨迹,且沿着理想轨迹前进。

表1 模糊控制规则表Tab.1 Table of fuzzy control rule
2.4 模糊推理
模糊推理是模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力,该推理过程是基于模糊逻辑中的蕴含关系及推理规则来进行的。
模糊推理采用Mamdani模糊推理方法,它利用极小运算规则定义模糊蕴含表达的模糊关系。为了说明模糊推理控制器的工作过程,以如下为例:前提是误差E=xo,误差变化率EC=yo,模糊规则为
由上述的前提和模糊规则可以得到输出转角值推理结果 Ci′为

式中:∧表示min,Ci的隶属函数值对应于所量化的等级上取1,其余均取为零值。则最终结果C′由综合推理结果 C1′,C2′,C3′,C4′得到,即:

式中,∨表示max。
2.5 解模糊
通过模糊推理得到的结果是一个模糊量,但在实际控制中,必须要有一个精确量才能直接控制被控对象。把模糊量转化为精确量的过程称为解模糊化。重心法是取隶属函数曲线与横轴围成的面积的重心作为模糊推理的输出值。本文采用重心法解模糊化。如式(7)所示,可得到精确的转向值。

3 多机器人路径规划策略
多机器人对同一定点进行跟踪控制,方法1就是每一台机器人以经过起点和目标点的直线为理想轨迹,机器人根据模糊控制器沿着理想轨迹前进,从而最终到达目标点,如图4所示。这种路径规划的优点是机器人前进的路程是最短的,而且设计简单,缺点是多机器人跟踪目标时不能包围式地到达目标。

图4 单目标路径规划图Fig.4 Path planning map of single-target
方法2就是对每一机器人在起点和目标点之间定义若干子目标,以这若干子目标组成分段理想轨迹,机器人根据模糊控制器沿着每一分段理想轨迹前进。如图5所示,机器人4和机器人1在起点到目标点间设立2个子目标,分别为A1A2和D1D2,同理机器人3和机器人2在起点到目标点间设立2个子目标,分别为B1B2和C1C2,其路径规划的目的是保证多台机器人能以扇形的形式到达同一目标点。本文中就采用方法2的多子目标路径规划。
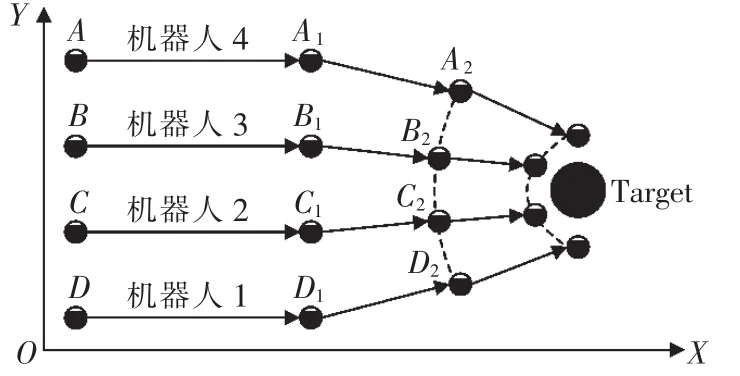
图5 多子目标路径规划图Fig.5 Path planning map of sub-goals
4 仿真实验及结果分析
4.1 实验平台介绍
实验平台(如图6)主要由监控系统和机器人控制系统组成,监控系统包括上位机、摄像头,机器人控制系统包括无线通讯网络、基站和机器人。摄像头由上位机驱动,结合计算机视觉库OpenCV,通过采集图像,实时计算机器人的位置,并将轨迹在上位机上显示出来,实现对机器人的监控;基站通过串口与上位机通讯获取机器人的位置信息,并通过无线通讯模块传输给机器人,机器人根据位置信息的反馈,采用模糊控制算法调整自身的运动状态,完成了对机器人的实时控制。

图6 实验平台结构图Fig.6 Configuration of experimental platform
机器人控制系统中基站和机器人都是采用ST公司的32位控制器STM32系列芯片,机器人可以根据基站发过来的信息独立完成任务,系统便于扩展,保证了系统的稳定性和实时性。
4.2 实验结果
本文以四台机器人跟踪同一个目标为例,根据模糊控制算法和路径规划,控制四个机器人对同一个目标进行跟踪,图7为机器人的轨迹跟踪图。
从图中可以看出,各台机器人能够在各自模糊控制器的作用下,实时调整自身的运动状态,且根据路径规划实现对目标的扇形跟踪。
本实验说明基于模糊控制算法的多机器人能够很好地实现对共同目标的跟踪与控制。
5 结语

图7 机器人轨迹跟踪图Fig.7 Tracing map of robots
本文研究了车式移动机器人在模糊控制算法的作用下,通过路径规划,实现多台机器人对同一个目标进行跟踪的过程,实验结果证明了模糊控制算法的有效性,该文章为后续的机器人编队做了基础的研究以及为军事应用提供了模拟手段,具有深刻的研究意义。
[1] Chwa D.Sliding-mode tracking controlofnonholonomic wheeled mobile robots in polar coordinates[J].IEEE Transactions on Control Systems Technology,2004,12(4):637-644
[2] Lee TL,Lai LC,Wu CJ.A fuzzy algorithm for navigation of mobile robots in unknown environments[C]//Proceedings of the IEEE International Symposium on Circuits and Systems,Piscataway,NJ,USA:IEEE,2005:3039-3042.
[3] Li M,Hong B,Luo R.Mobile robot simultaneous loc-alization and mapping using novel rao-blackwellised particle filter[J].Chinese Jouranal of Electronic,2007,16(1):34-39.
[4] Y Kanayama,Y Kimura,F Miyazaki,et al.A stable tracking control method for an autonomous mobile robot[C]//Proceedings of the 1990 IEEE International Conference on Robotics and Automation,1990,1,Cincinnati,OH:384-389.
[5] 包明,张睿,余成波.基于模糊控制的移动机器人FPGA实现[J].电子技术应用,2008,34(7):29-31.
[6] 陈卫东,朱奇光.基于模糊算法的移动机器人路径规划[J].电子学报,2011,39(4):971-974. ■
