Control system design of automatic down-filling machine based on ARM7TDMI*
2014-03-09QiaoQIAOLiangzhiFAN
Qiao QIAO,Liang-zhi FAN
School of Mechanics and Electronics Engineering,Wuhan Textile University,Wuhan 430073,China
Control system design of automatic down-filling machine based on ARM7TDMI*
Qiao QIAO†,Liang-zhi FAN
School of Mechanics and Electronics Engineering,Wuhan Textile University,Wuhan 430073,China
The Down-filling machine is an automatic,intelligent,mechanical and electrical device with low-cost,convenient,great efficiency that can reduce labor intensity and improve labor conditions.It can fill down to duvet or down jacket from the container according to weight data exactly.This paper elaborated on several aspects:working principle of automatic Down-filling machine,realization of control system,realization of control strategy based on fuzzy inference,and research of serial communication feedback.The hardware system of Down-filling machine based on ARM7TDMI has been finished.And the system makes software and hardware logical in system frame,and achieves high complex controlling with low cost.In control field,closed-loop control is also implemented in this system.At the same time,the function modules of industry Downfilling machine has been studied,such as man-machine interface,motor control,the use of the FLASH memory AT29C020,the use of weighing sensor,etc.Results show that the system hardware has high stability and fast speed in fuzzy inference.
Down-filling,Fuzzy inference,ARM7TDMI,Flash,Closed-loop
*Project supported by National Natural Science Foundation of China(Number:50805109)
†Qiao QIAO,E-mail:qq526680@163.com
1.Introduction
With the improvement of living standards,people increase the demand for down products.With the appearance of domestic and foreign enterprises,a great deal of the mechanical products in down industry obtain the rapid development.The down filling machine is an automatic intelligent,mechanism and electric device that can reduce labor intensity and improve labor conditions.We has chosen ARM7TDMI as the CPU of the automatic down-filling system.At the same time,this article introduces the realization of a fuzzy logical controller in the system.
1.1.Work process of automatic down-filling machine
The model of the feather filling machine is shown in Figure 1.
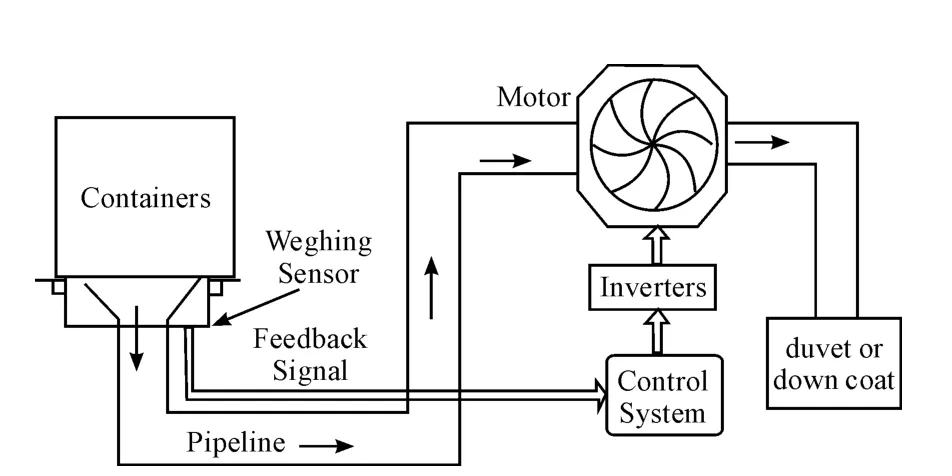
Figure 1.The model of the down-filling machine
Down-filling machine will divert down from the cont-ainer to duvet or down jacket by blower fan.At the same time,by the use of sensor feed-back performance,feather weight will be monitored at any time to get precise filling results.
1.2.The main work flow of automatic down-filling machine
The main work flow of automatic down-filling machine is shown in Figure 2.
For the realization of automatic control,the system has taken the closed-loop feedback control methods[1].Since the control object-the work motor can not determine the load disturbance,the system uses a fuzzy control algorithm.The control algorithm can avoid the accurate modeling of system,combine experimental and control motor speed.
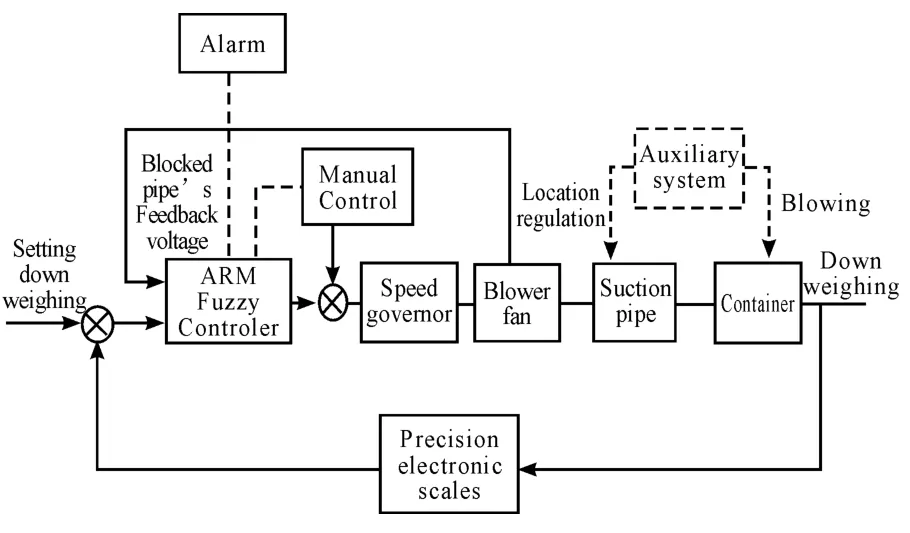
Figure 2.Diagram of down-filling control system
1.3.Composition of the system hardware modules
The system has the following function modules:①Human-Computer Interaction Interface:the system has used LCD-6 inches touch screen and keyboard interface.② Motor Control:in automatic down–filling machine,motor speed can be adjusted by transducer.Universal transducer’s remote control is in two ways:control of terminal and communications.③ Electromagneticvalvecontrol:electromagnetic valve is controlled by electromagnetic relays,including blowing valve,stopping valve,heating valve in the system.④The system has three sensors:down density sensor,channel state feedback sensor,weighing sensor.⑤Detection of down content:The system has chosen PTM-1 sensor that would export TTL signal through serial communication.⑥Internet Remote Monitoring:it needs the support of the network,the system should supply the LAN interface or interface of MODEM.Through this analysis[2].Downfilling control system’s hardware functional block is shown in Figure 3.
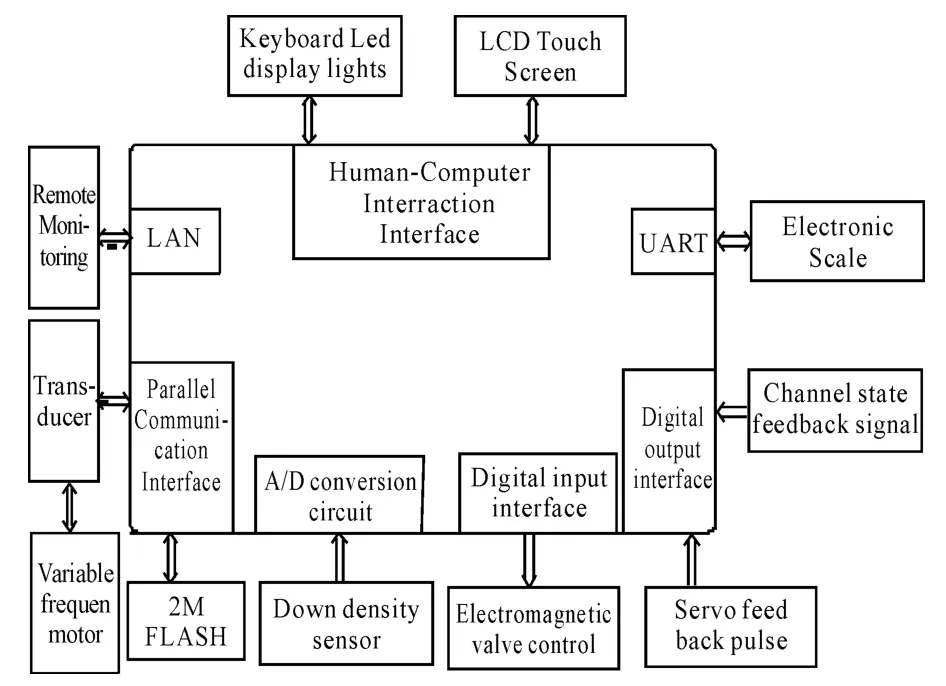
Figure 3.Hardware functional block of down-filling control system
2.Introduction of the system’s hardware
2.1.Weighing sensor introduction
1)Electronic scale’s communication protocol
Communication protocol is the agreement that should start up prior to the beginning of communication device’s work.Communication between electronic weighing scale and CPU should also be carried out under the certain communication protocol[3].
In this system,electronic weighing scale has three optional serial communication ways.The first one is a continuous sending way,and its format is shown in Figure 4.

Figure 4.The format of the communication agreement
Description:
<STX>:it is the format’s head information that will be replaced by ASCII code 02 H;
<ETX>:it is the format’s Tail information that will be replaced by ASCII code 03 H;
N(Capital):Weight marker;
P(Capital):Amount marker;
The second way is that the electronic weighing scale will send the data after display stability.Its format can refer to Figure 4.
After CPU has detected the right data,it will store the useful data into 2 M flash,and compare with the corresponding data to realize the feedback.
2)Hardware connection
ARM7TDMI has two UART that comply with TTL voltage logic.The electronic weighing scale and CPU should be connected by ASIC-MAX232.The hardware connection is shown in Figure 5.
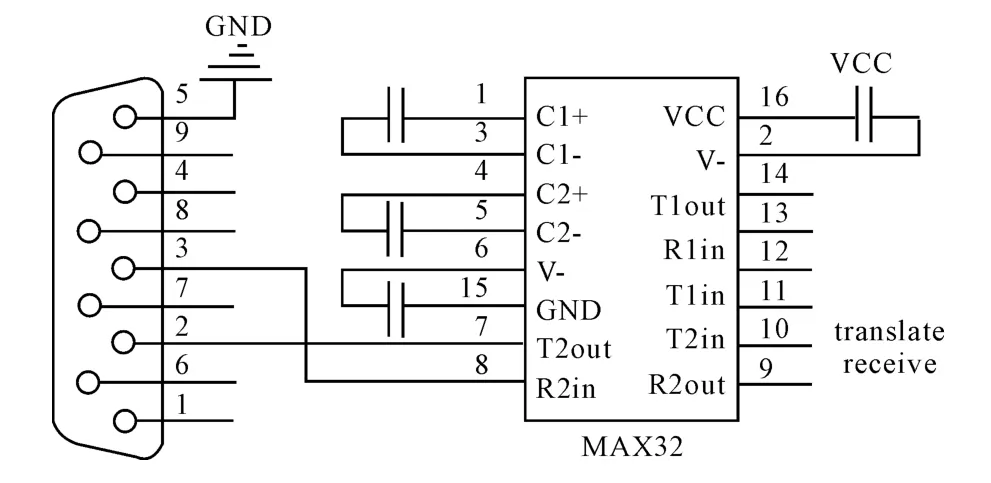
Figure 5.The circuit diagram of the MAX232 serial communication
2.2.The use of the FLASH memory AT29C020
1)Reading and writing Time Sequence of the FLASH memory AT29C020
This system uses 2M FLASH ASIC-AT29C020 to store information.
We adopt extended mode of ARM Parallel Port whose connection is very simple.Address lines and data lines will not occupy the same port,which facilitates the control and expansion.Our key task is to read and write AT29C020 by the right Time Sequence[4].Itsreading Time Sequence isshown in Figure 6.
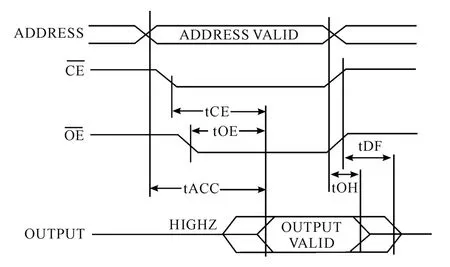
Figure 6.Wave forms of reading Time Sequence
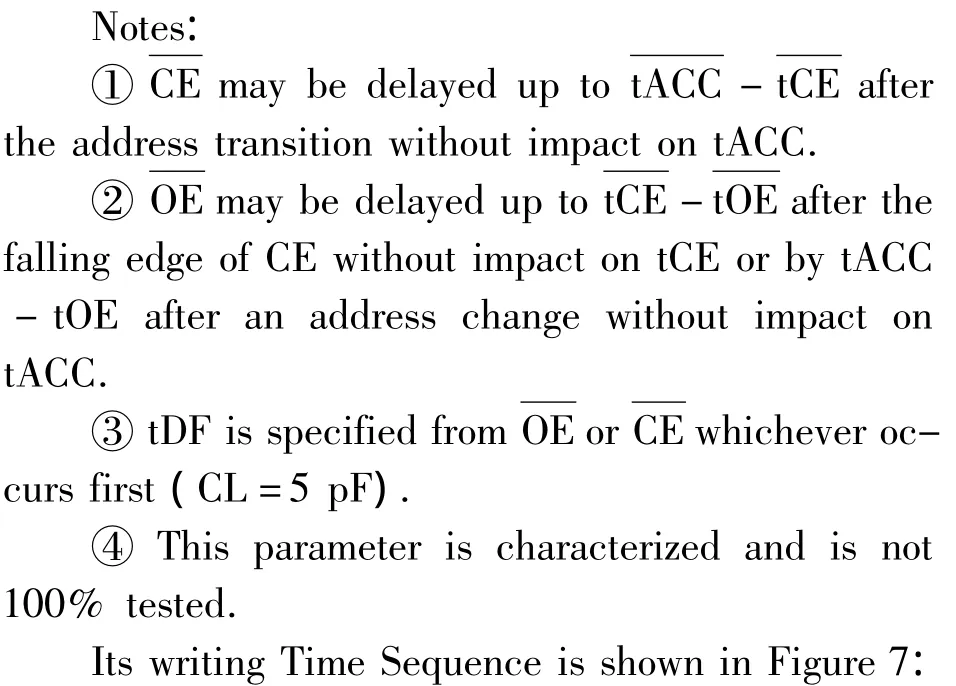
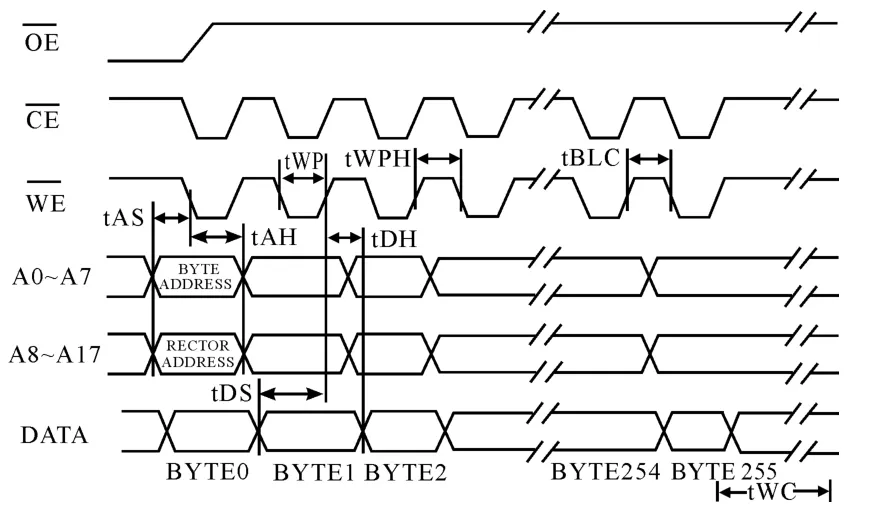
Figure 7.Wave forms of writing Time Sequence

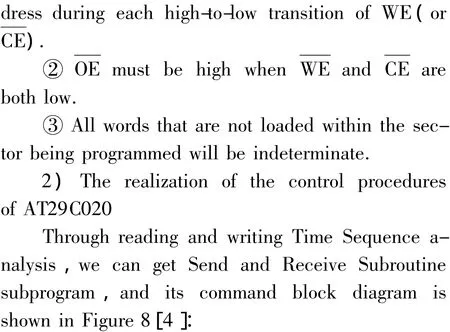
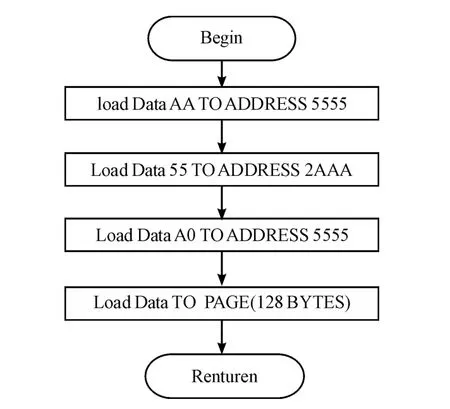
Figure 8.Command block diagram of AT29C020
2.3.Other hardware circuit design
1)Human-computer interaction interface
The system uses SHARP company’s TFT display module-LQ64D141 that adopts 18 RGB input and has 6.4 in visual area.
2)Down density sensor circuit design
The system uses a Motorola's down density sensor-MPX10DP.First of all,down density signal will be converted into pressure signal through the sensitive components,then MPX10DP will transform pressure signal into voltage signal[4].Circuit design drawing is shown in Figure 9:
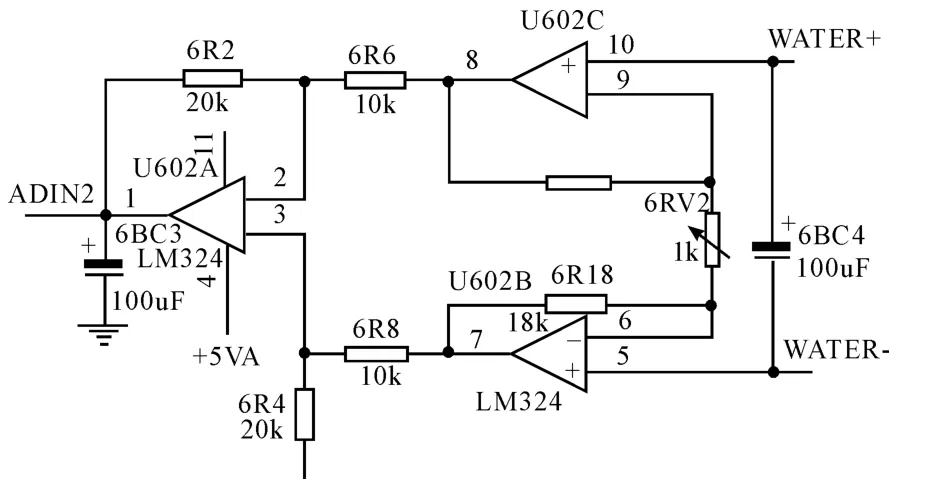
Figure 9.Design drawings of down density sensor circuit
3)The realization of frequency control system
According to the demand for electric motors,the system has chosen the 1.5 kW transducer with external braking resistor.Wiring diagram of frequency control system is shown in Figure 10:
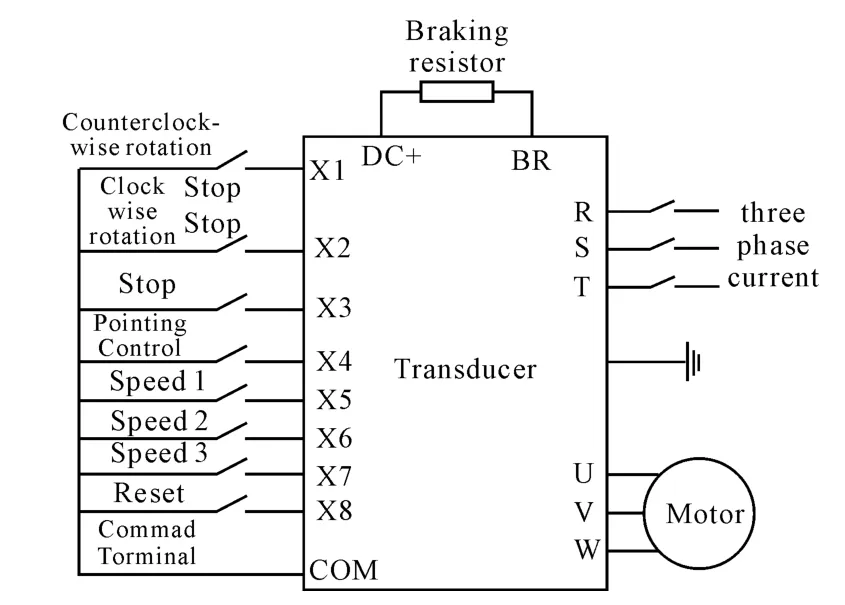
Figure 10.Wiring diagram of frequency control system
Input part:Three-phase current;
Input part:Motor;
Breaking part:Breaking resistor;
Control part:Parallel interface.
3.The realization of fuzzy inference and control strategy
Down weight is the input data of fuzzy algorithm,and the motor’s frequency control and downfilling time are the output data.The basic experience data from experiment will be made into knowledge database and control strategy will be made into rule database.The algorithm is shown in Figure 11.
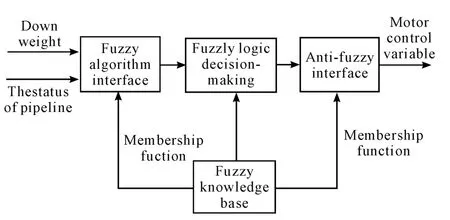
Figure 11.Block diagram of fuzzy algorithm
Table 1 represents the experimental tracking data of filling-process of 200 g down
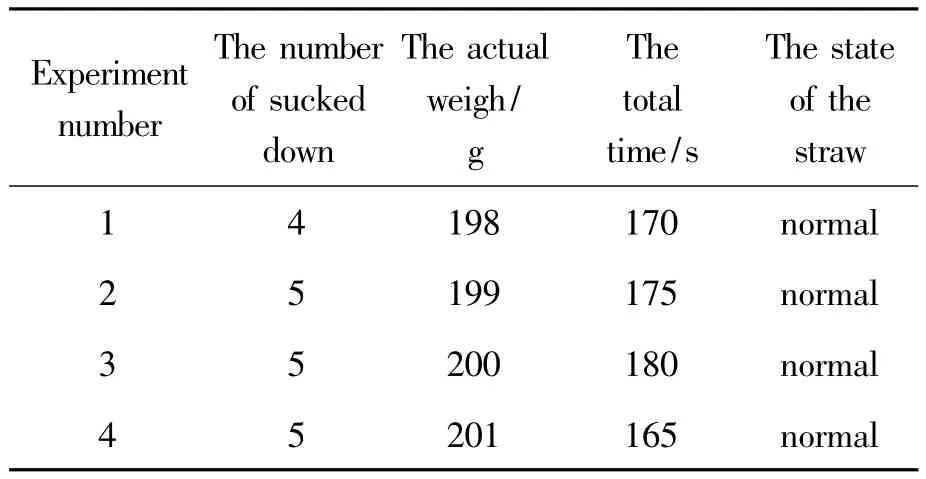
Table 1.Test Data
4.Conclusion
This article has designed the control system of an automatic Down-Filling machine based on ARM7TDMI core.At the same time,the function modules of industry down-Filling machine has been researched,such as man-machine interface,motor control,the use of the FLASH memory AT29C020,the use of weighing sensor,realization of control strategy based on fuzzy inference,etc.
The results show that the system adapts to the needs of industrial production.
[1] Huang K N,Huang C F,Li Y C,et al.Temperature measurement system based on ultrasonic phase-shift method[J].Biomedical Engineering,2007:294-295.
[2] Matsuse K,Taniguchi S,Yoshizumi T.A speed-sensorless vector control of induction motor operating at high efficiency taking core loss into account.Trans.on Ind.2007,37(3):548-557.
[3] McLean R P.Approximation theory for stochastic variational and Ky Fan inequalities in finite dimensions[J].Annals of Operations Research,2006,44(1):43-61.
[4] Garg V K,Raymond J.Magneto-thermal coupled analysis of canned induction motor,Energy Conversion[J].Transactions on Magnetics,2007,5(1).
[5] Dong Jiechao,Han Feng,Yun Yan-ren.SCM control stepper motor S-shaped curve according to the frequency design of lifting[J].Missiles and Guidance Journal,2006,26(2):157-169.
基于ARM7TDMI的羽绒充灌设备控制系统设计*
乔 桥†,范良志
武汉纺织大学机电学院,长沙 430073
充绒机是将羽绒按照要求的重量精确地从容器充灌到被服中的一种具有自动化、智能化的机械电气设备。对自动变频充绒机的工作原理、充绒过程控制系统实现、基于模糊算法的充绒机控制策略的自动控制系统的实现、变频调速技术的应用、串口通信反馈实现闭环控制等方面进行了具体而深入的研究,在此基础上完成了基于ARM7TDMI核的系统硬件设计。实践证明:系统硬件运行稳定,在进行模糊推理学习时具有更快的速度。
羽绒充灌;模糊算法;ARM7TDMI;Flash;闭环系统
TU96+3
10.3969/j.issn.1001-3881.2014.06.015
2013-10-28
猜你喜欢
杂志排行

机床与液压的其它文章
- Flow field CFD analysis of axial flow blood pump*
- Cam profile optimization design of variable cycle reciprocating piston engine*
- Analysis of the characteristics and frequency for the annular water-air self-excited oscillation jet pump*
- Patrol inspection system of underground cable joint fault based on wireless communication*