面向消防、救援、治安的无盲区定位系统的研究
2014-03-09丁承君苑光明
丁承君,李 根,苑光明,申 敏,崔 超
(河北工业大学 机械工程学院,天津 300130)
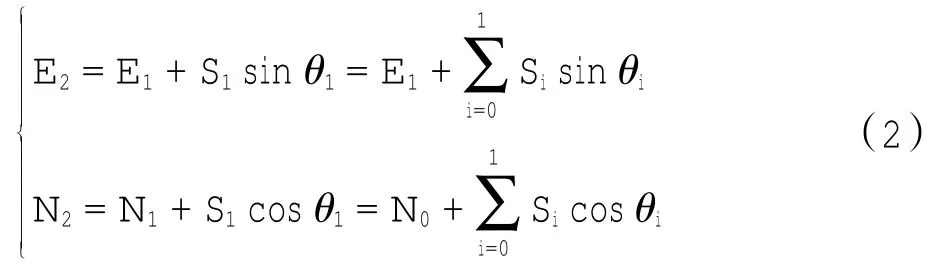
同理,行人在t2时刻的位置(E2,N2)可表示为:
面向消防、救援、治安的无盲区定位系统的研究
丁承君,李 根,苑光明,申 敏,崔 超
(河北工业大学 机械工程学院,天津 300130)
基于MEMS、GPS、3G、Virtual Reality以及智能控制等技术,基于航迹推算和特征提取等算法,使用动作分类的方法,再结合GPS定位与盲区推估这样组合导航形式来实现消防、救援人员在广域危险室外环境和复杂非结构化室内环境的全地域无盲区定位和状态监测(正常、跌倒、受困等),从而实现对救援消防作业人员的远程监控、调度和安全保障.
无盲区定位;加速度传感器;GPS;行人导航
随着社会和科技的进步,各种危险作业移动机器人的研究日趋深入,但在未来相当长的阶段,消防、地震、矿难等突发事故的处置还将主要依赖作业人员深入事故现场进行处置和救援,保证作业人员的生命安全及保持战斗力是首要任务.因此在作业人员深入事故现场、全力以赴进行事故处置的过程中,对其所处位置、作业状态进行远程监控和指挥非常必要.目前该领域存在诸多技术问题需要攻克.对于定位系统,世界上发展最为成熟与精确的是全球卫星定位系统(GPS,global positioning system)和我国研发的北斗导航系统.以上2种系统的原理都是利用多颗卫星联合对持有接收器的节点协作定位,可以达到较高的精度,但在某些特定的场景下,如在有遮挡的场合(建筑物内,茂密的森林等情况)无法使用,这就需要利用盲区自定位的方法进行节点的自定位.本文研究面向消防、救授、治安的无能为力盲区定位系统.
1 定位系统的设计
由于GPS及其他定位技术各有缺陷,使得在盲区等特殊场合无法实现对人员的定位[1].因此,本文提出利用已获得的GPS位置信息作为基准定位信息,基于三维加速度传感器的定位技术,实现在盲区,尤其在室内的定位.它是一种自主式导航定位技术.该技术的基本原理是以GPS为初始基准位置,利用多种传感器获取人员方向和速度等位置信息,不需要事先布设相关的设备,根据获得的人员位置信息进行定位航位推算DR,从而获得当前的定位信息.将加速度传感器与GPS构成的组合定位系统是将两者的优点结合起来,当GPS系统受到干扰或遮挡无法定位时,自动切换至加速度传感器定位,构成独立的DR系统.DR系统自主对目标进行定位,保证了人员定位信息的完整性和可靠性.同时,利用GPS提供的高精度位置和速度信息为人员定位推算提供初始参数,不断对定位推算系统的误差进行校正和补偿,从而实现无盲区(全区域)的定位.方案示意图如图1所示.
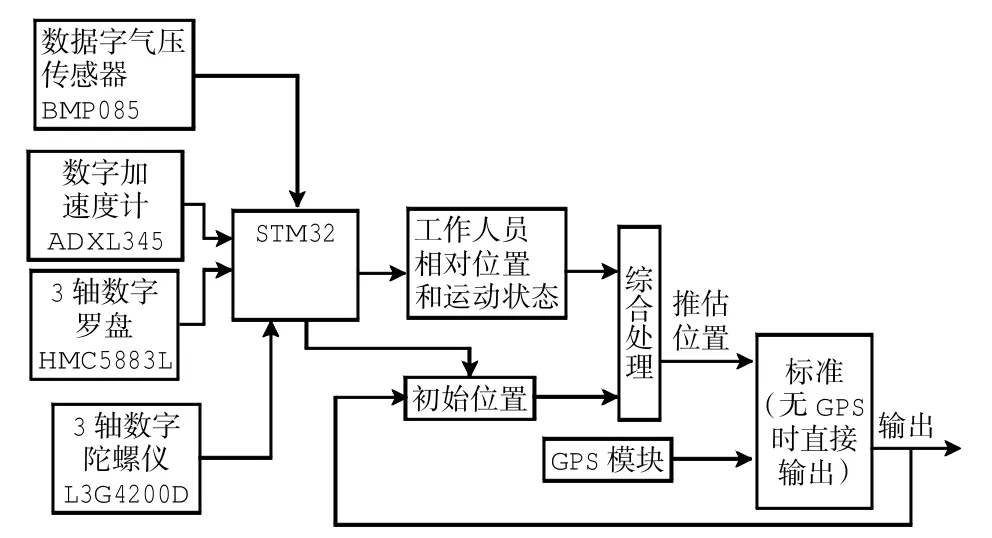
图1 系统功能框图Fig.1 System function diagram
2 核心技术
2.1 硬件设计
核心技术涉及2个方面:定位算法和核心电路控制.核心电路板为整个定位终端的开发和应用提供了基本的计算平台和信息平台.核心电路板的制作要求功能强、功耗低、体积小,其是整个定位终端的核心.
由于定位终端需要与多种传感器进行连接,并且为了保证位置信息的准确性,所以采集到各种数据都需要在定位终端上进行处理,得出位置信息后再发送到上位机,而且这个过程还需要很高的实时性,所以对主控芯片有一定要求.另外,为了定位终端可以长时间连续定位,必须保证有充足的电能,所以要求低功耗.
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计ARM Cortex-M3内核.增强型系列时钟频率达到72 MHz,是同类产品中性能最高的产品;基本型时钟频率为36 MHz,以16位产品的价格得到比16位产品大幅提升的性能,是16位产品用户的最佳选择.2个系列都内置32 kB到128 kB的闪存,不同的是SRAM的最大容量和外设接口的组合.时钟频率为72 MHz时,从闪存执行代码,STM32功耗36 mA,是32位市场上功耗最低的产品,相当于0.5 mA/MHz,所以能完全满足系统要求.
传感器主要由3轴数字加速度计ADXL345、3轴数字罗盘HMC5883、3轴数字陀螺仪L3G4200D和BMP085气压传感器组成.这4种传感器组成一个模块,通过I2C串行总线与STM32主芯片连接,模块原理图如图2所示,图3为模块与主芯片的连接图.
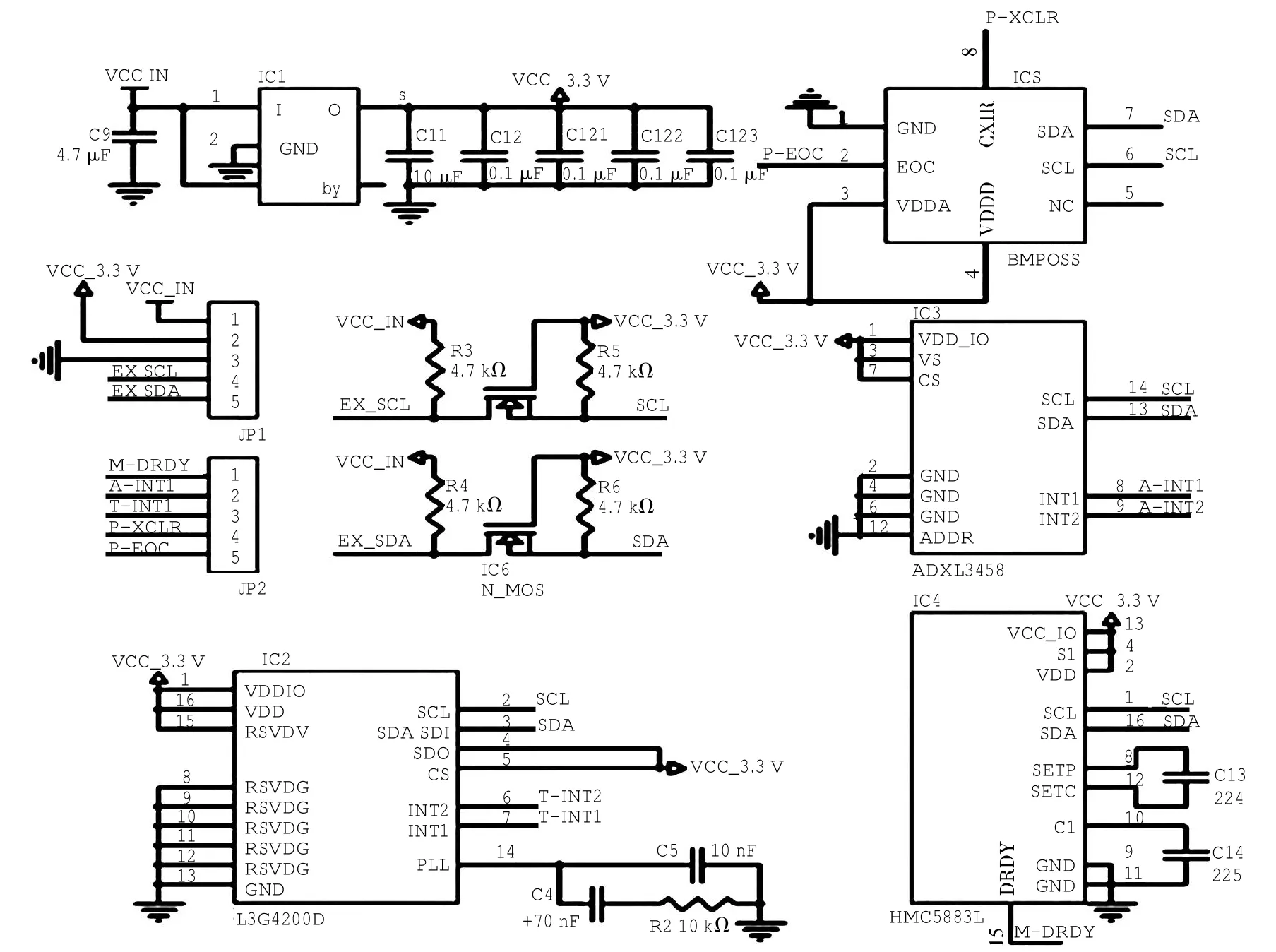
图2 传感器模块原理图Fig.2 Sensor module principle diagram
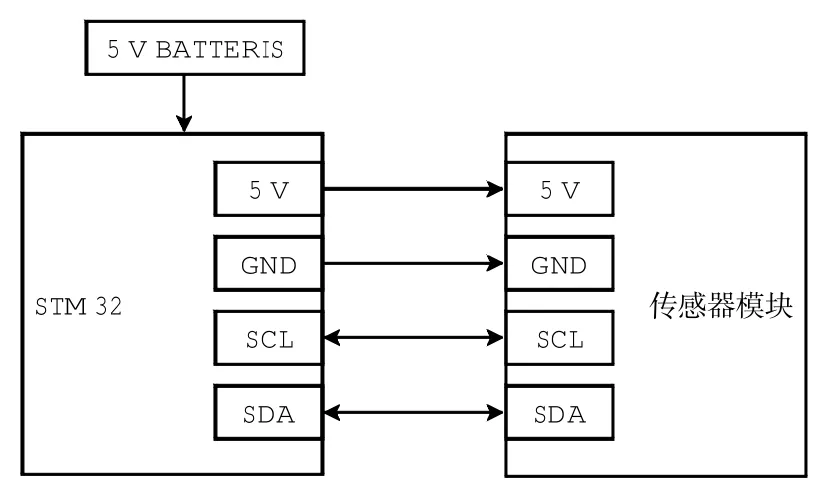
图3 传感器模块连接图Fig.3 Sensor module connection diagram
2.2 定位算法设计
本系统主要是辅助GPS定位,所以在GPS信号有效时,利用GPS模块直接得到经纬度,当GPS信号无效时,以GPS无效点为原点,进行盲区相对位置的定位.为了实现这个功能,就需要将GPS定位与盲区定位分成2部分,本研究为充分利用CPU,减少开发时间,所以引用了操作系统.
软件系统采用uc/os-Ⅱ实时操作系统,uc/os-Ⅱ是一个开源的实时嵌入式操作体系,是一个占先式、多使命处置的内核.源代码为C言语,有很强的移植性.由于简略,源代码量少,对CPU及外围电路的要求不高,能独自在一个CPU上运行,定位方面主要有2个任务.任务1负责GPS数据的读取,当数据有效时直接输出,当数据无效时,任务1挂起,低于它优先级的任务2开始执行,图4为任务1的流程图.
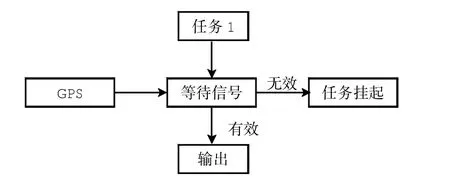
图4 任务1流程图Fig.4 Task 1 flow chart
任务2即盲区推估功能,这是本系统的核心部分,采取行走航迹推算算法PDR,其基本原理如图5所示,即从一个已知坐标开始,通过传感器获取人在该位置的方向,速度等数据来推算行人在下一时刻出现未知的过程[2-6].E、N分别表示东向、北向位置分量,(E0,N0)是行人在t0时刻的初始位置,S0和θ0分别表示行人从t0时刻到t1时刻、从位置(E0,N0)行走到位置(E1,N1)的移动距离和绝对航向,则行人在t1时刻的位置可表示为:

同理,行人在t2时刻的位置(E2,N2)可表示为:
根据上述原理,可获得行人在tk时刻位置的航位推算公式为:
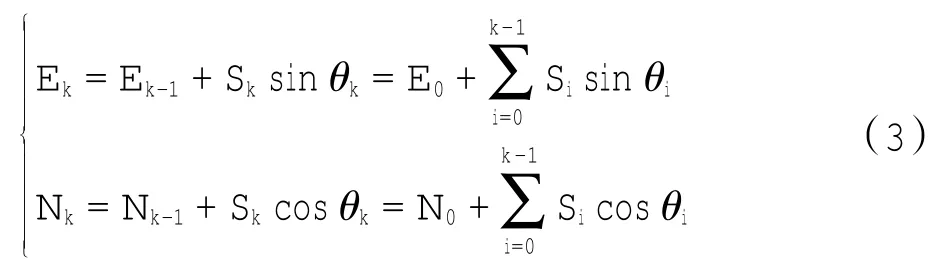
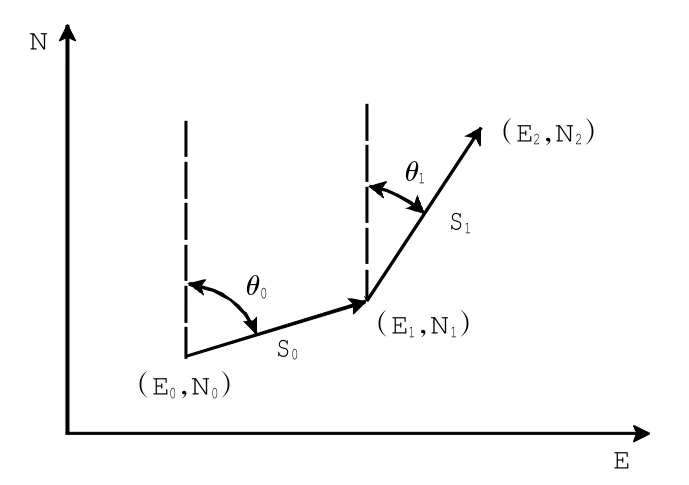
图5 航位推算算法原理Fig.5 Dead reckoning diagram algorithm
2.3 人体动作分类的研究
由于步行行为多样并且多变,使得PDR应用在行人导航体系时,其具体方式有所变化.依据步行特点和导航系统易佩戴、低成本的要求,行人的行走距离很难直接通过传感器测量,也不容易依据加速度积分的方式进行计算.因此,行人导航系统中主要采用步长获得相对位移量,那么位移S=n×p,n为步数,p为步长,此为行走航迹推算算法PDR,图6为行人航迹推算PDR机制,人体动作比较复杂,不同动作的步长也是不同的,根据其每个动作的行走距离不同赋予不同的值,再根据其行走的方向求出位移,其4个关键技术问题为动作分类、步长估计、航向确定和位置计算.
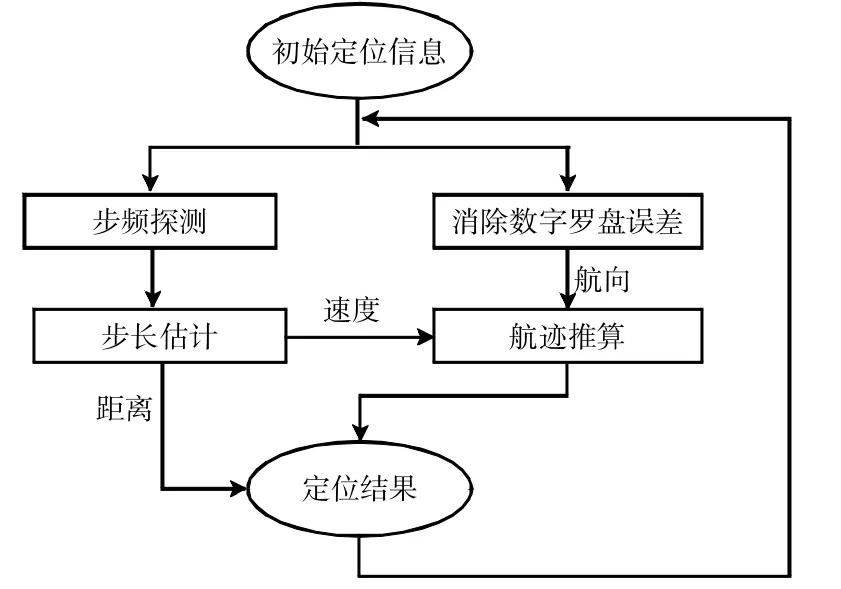
图6 行人航迹推算PDR机制Fig.6 Pedestrian dead reckoning PDR mechanism
消防员动作大体分为走,跑,匍匐,躺倒,卧倒,上楼,下楼等几种动作如图7所示.
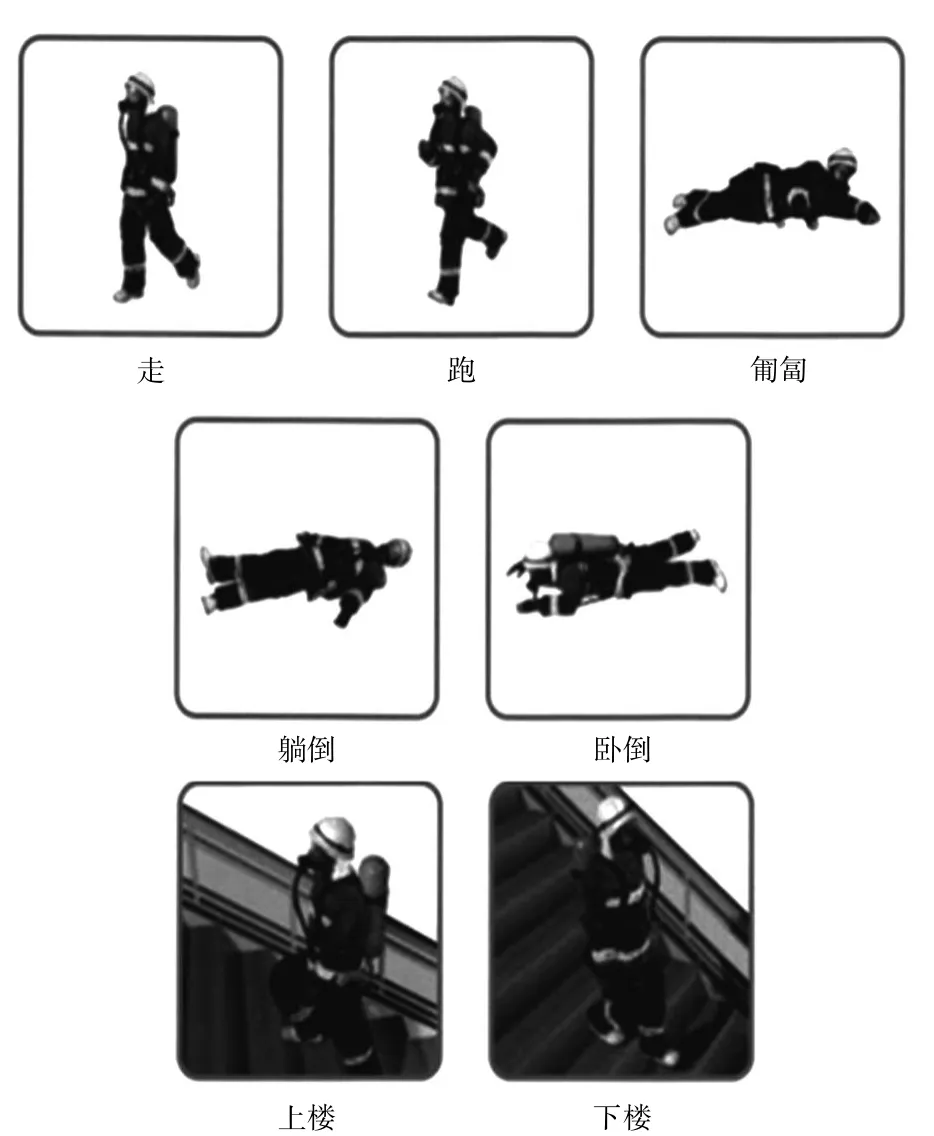
图7 消防员动作状态Fig.7 Firemen action state
通常,选择系统的分类识别率取决于特征的描述,用于对象识别的识别模型和学习方面的分类以及特征提取与选择是解决分类的关键技术[7-9].通过信号的特点,利用人体运动模式识别系统的统计分析、近年来,加速度信号的特征提取方法分为3类:时域分析法、频域分析法、时频分析法.直接提取时域加速度信号的时域分析方法是相对简单的,其计算复杂度是最小的.时域常用的有:均值,方差,相关系数,能量,许多时间域的特征具有明确的物理意义,如均值表示加速度信号的直流分量,标准偏差可以描绘加速度信号的稳定程度,而相关系数反映了2个坐标轴的信号之间的相关性.
频域分析法对采集的加速度信号先做快速傅里叶变换(fast fourier transform,FFT),然后从频域提取特征矢量.频域特征主要有FFT系数、频域熵(frequence-domain etropy,FDE)、能谱密度(power spectral density,PSD).还有一种时频分析法,主要是基于小波分析方法的.由于传统的傅里叶分析只能较好地刻画信号的频率特征,而几乎不提供信号的任何时域信息,而小波分析却能把时域信息和频域信息两者结合起来,因而最近许多研究工作使用这种方法提取特征.
本研究主要从时域和频域方面进行分析,频域分析主要采用快速傅里叶变换的方法,首先在数据分析前应确定传感器佩戴位置,因为当位置是不确定的,所获得的数据是没有意义的.在行走过程中的人,身体各部分如脚、腿、腰部等部位也会产生相应的运动,引起加速度变化.显然,脚或腿运动越激烈,改变运动参数更为明显,提取有用的信息很容易,腰部的运动要轻松许多,但传感器容易损坏,因此,根据参数变化对较平稳的腰部运动进行分析与研究,为了克服重力扰动与不同的传感器放置带来的加速度干扰,采用净加速度分析.
还需要对采集到的数据进行滤波处理,对原始数据的滤波处理的目的有2个:①去除噪声的干扰;②使得加速度数据更适于被计算机所识别.
这2个目标是使原始数据可以更容易和更准确地被计算机所识别,由于噪声干扰,使加速度曲线的峰值突发意外.对原始数据进行预处理,原则是尽量消除各种噪声,尽量保持原始数据的更多特征点,或放大到一定程度.
平滑滤波是低频增强的空间域滤波技术[10].它的目的有两类:一类是模糊;另一类是消除噪音.空间域的平滑滤波一般采用简单平均法进行,就是求邻近像元点的平均值.邻域的大小与平滑的效果直接相关,邻域越大平滑的效果越好,但邻域过大,平滑会使边缘信息损失的越大,从而使输出的图像变得模糊,因此需合理选择邻域的大小.在这个项目中,主要目的是消除噪声,所以采用的方法是简单的平均法滤波.其公式为:
利用这个公式的好处是:①可以使曲线更加平滑,这也是用这个公式的目的;②由于公式采用的都是之前的节点值,所以没有时间上的延迟;③总体上看公式比较简单,不会太过耗费资源.
经过平滑处理波形不仅保持了原有的基本波形特征,而且原来充满噪声的波形在很大程度上变得更加平滑了,很好地起到了去噪和平滑的作用.
图8所示为直走、下楼、上楼和跑这4种运动的加速度曲线图,采样频率为100 Hz,y轴坐标单位为mg,x轴为采样点数.由图8可以明显看出上楼、直走、下楼、跑在时域上波峰和波谷有很大差别,但是上楼和直走、下楼和跑不能明确地区分开来,那么对加速度曲线进行频域分析,采用快速傅里叶变化对加速度曲线进行转化,如图9所示.

图8 加速度曲线图Fig.8 Acceleration curves
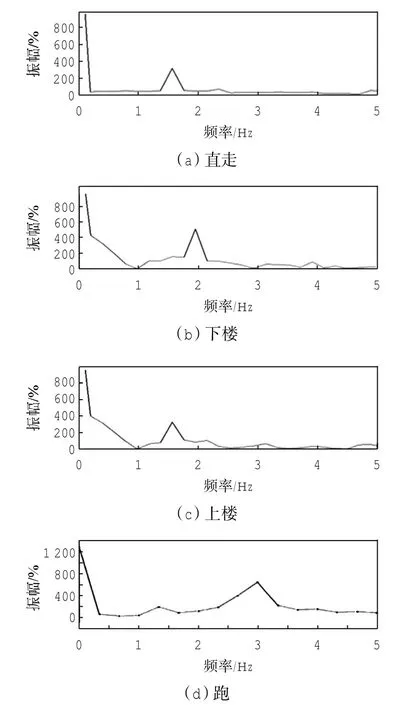
图9 傅里叶变换Fig.9 Fourier transform
Y轴为振幅,X轴为频率,由于静止时加速度值为1 g,所以傅里叶变化后直流分量为1 g,跑步的频率在3 Hz左右,比其他类型动作要快的多,但是直走和上楼在频率方面没显著特征,难点就在于如何将这2种状态区分开来.
既然这2种状态无论从频域还是时域方面都没有显著特征,那么就设置一种中间状态,包含所有上楼状态和部分直走,当有上楼的明显特征出现时,判断为上楼,中间态的值全归为上楼,否则等待直走来临时,则归为直走.为了检测这些特征值,引入一个滑动窗口,滑动窗口中保留加速度采集到的最近80次采样值.动作分类流程图如图10所示.
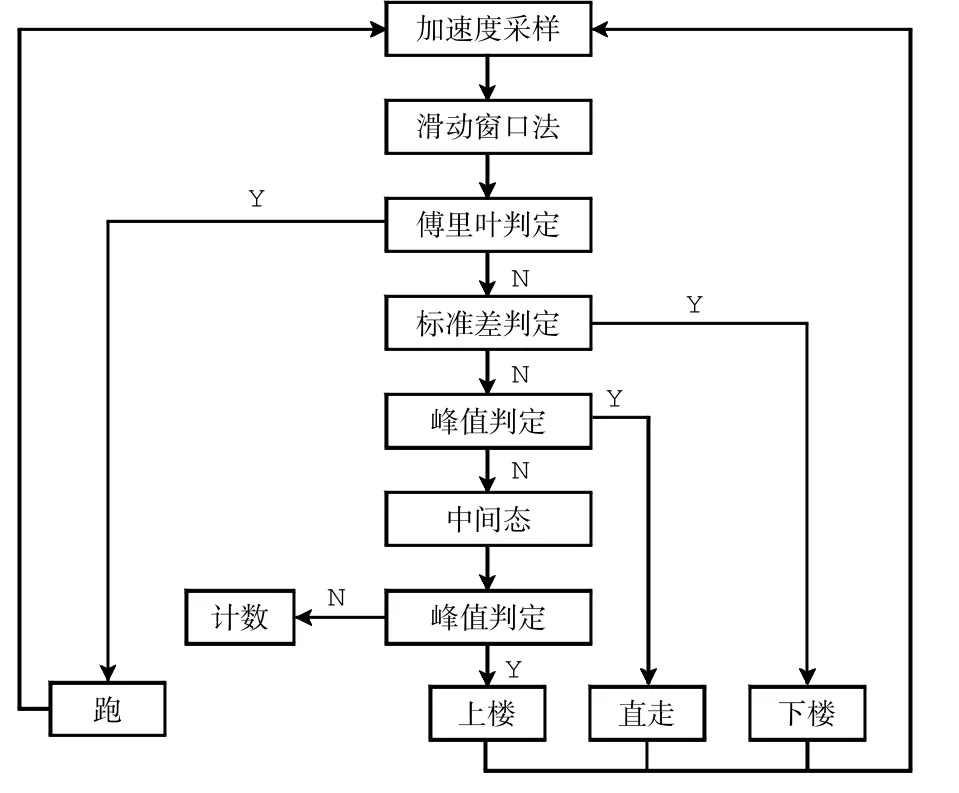
图10 动作分类流程图Fig.10 Classification of motion flow chart
下楼和上楼采取时域中标准差的方法进行判定,上楼和直走以波峰和波谷的差值作为阈值,而跑就根据傅里叶变换后的频率进行区分了.这样就将人体的行走模式简单的分为了4种.至于人体的卧倒等状态也是通过加速度传感器进行检测的,因为本研究使用的是3轴加速度传感器,并且佩戴位置是固定的,当人员静止时,加速度传感器是1 g,所以不同静止状态只要检测3个轴的加速度数值就可以确定了.
2.4 电子罗盘的校正
航向由电子罗盘HMC5883L传感器进行测量,但是传感器在校准之后,不能有任何倾斜,否则将会造成较大数值偏差,这在行人定位中是不可能实现的,为克服这一缺点,采用卡尔曼滤波的方法进行修正,具体措施如下:
(1)构建方位角的状态方程:使用3轴数字陀螺仪L3G4200D,获得航向角方向的角加速度ax,那么状态方程为X(k)=X(k-1)+axkt+W(k).
式中:X(k)为k时刻的航向角;X(k-1)为k-1时刻的航向角;axk为k时刻的角加速度;t为陀螺仪每次读取数据的时间;W(k)和下面所说的V(k)分别为过程和测量的噪声,假定其恒定不变都为4°.
(2)方位角的测量值由电子罗盘进行观测,Z(k)系统的观测量,V(k)为测量噪声.首先预计k时刻的航向角X(k|k-1)=X(k-1|k-1)+axkt,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,Kg为卡尔曼增益,X(k-1|k-1)的协方差为P(k-1|k-1),X(k|k-1)的协方差为P(k|k-1),P(k|k-1)=(P(k-1|k-1)2+42)1/2,Kg(k)=(P(k| k-1)2/(P(k|k-1)2+42))1/2,X(k|k)=X(k|k-1)+Kg(k)(Z(k)-X(k|k-1)),P(k|k)=((1-Kg(k))P(k|k-1)2)1/2.这样就可以修正因倾斜引起的偏差.
经过动作分类得到不同状态下的步长,再用经过校正的电子罗盘提供准确的航向,就可以得到较为精确的位置信息.因为GPS提供的定位信息为经纬度坐标,而盲区推估得到的是相对坐标,为了位置信息的统一,盲区推估算法得到的位置信息需通过大地主题正算进行坐标转化,具体流程图如图11所示.
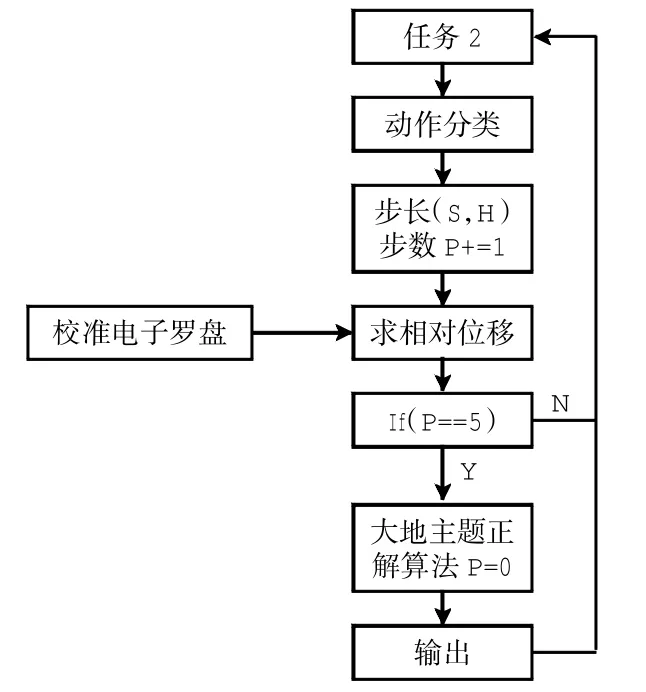
图11 盲区推估流程图Fig.11 Blind estimation flow chart
3 结束语
本系统避免对加速度观测值积分,而是基于行人步行的运动生理学特性,利用行走时加速度波形的周期性特征和统计值与行走速度相关的特点,直接估计行走步长,使其可以使低成本传感器也获得高精度的位置信息,并加入了对电子罗盘的修正方法使其输出方向更为准确.同时,本系统采用GPS和盲区定位相结合的方式,使其可以长时间准确的输出定位信息,精度误差为总路程的7%.因为人体动作较为复杂,虽然本文介绍的分类方法能基本识别这4种动作,但显然要提高行人导航定位精度,就要对人体的动作进行更细致的划分,所以动作分类是行人导航PDR算法研究的重点内容,这也是以后需要考虑发展的方面,而且本系统盲区推估功能能检测的状态还较少,精度有限,这些方面有待后续研究.
[1] 刘晶璟.采用加速度传感器技术实现盲区定位的研究和开发[D].上海:上海交通大学,2012.
[2]陈伟.基于GPS和自包含传感器的行人室内外无缝定位算法研究[D].合肥:中国科学技术大学,2010.
[3] 许睿.行人导航系统算法研究与应用实现[D].南京:南京航空航天大学,2008.
[4]郑炜,王卫星,梁顺龙.面向行人导航的RMLTDR算法研究与实现[J].计算机科学,2011,38(5):240-244.
[5]田小芳,熊超,陆起涌.基于加速度传感器的GPS盲区内定位方案研究[J].微电子学与计算机,2006,23(5):187-192.
[6] 黄岳嵘,赵毅,孟侃良.GPS盲区三维定位技术的研究[J].计算机应用与软件,2012,29(5):289-294.
[7] 薛洋.基于单个加速度传感器的人体运动模式识别[D].广州:华南理工大学,2011.
[8] 李月香.基于加速度信号的走路模式多级分类算法[D].太原:山西大学,2009.
[9]宋浩然,廖文帅,赵一鸣.基于加速度传感器ADXL330的高精度计步器[J].传感技术学报,2006,19(4):1005-1008.
[10]李昊.基于三轴加速度传感器的动作分类和步数检测[D].天津:天津大学,2010.
Research of no blind area positioning system of fire,rescue and security
DING Cheng-jun,LI Gen,YUAN Guang-ming,SHEN Min,CUI Chao
(School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China)
Based on MEMS,GPS,3G,Virtual Reality and intelligent control technology,through the methods such as dead reckoning and feature extraction algorithm based on the use of action classification,combined with GPS positioning and dead reckoning navigation to realize the whole region without blind area location and status monitoring of the fire,rescue workers in the area of dangerous outdoorenvironment and complicated unstructured indoor environment(normal,fall,trapped etc.),in order to realize remote monitoring,scheduling and security forfire rescue personnel.
no blind positioning;acceleration transducer;GPS;pedestrian navigation
TP212.9
A
1671-024X(2014)01-0059-06
2013-07-04
河北省自然科学基金资助项目(F2013202220)
丁承君(1973—),男,教授,博士生导师.E-mail:190532210@qq.com
