EPS系统中PMSM转子位置的测量方法
2014-03-09汪剑鸣袁臣虎
蒋 翔,汪剑鸣,袁臣虎
(1.天津工业大学电子与信息工程学院,天津 300387;2.天津工业大学电气工程与自动化学院,天津 300387)
EPS系统中PMSM转子位置的测量方法
蒋 翔1,汪剑鸣1,袁臣虎2
(1.天津工业大学电子与信息工程学院,天津 300387;2.天津工业大学电气工程与自动化学院,天津 300387)
为获取EPS系统中永磁同步电机的转子位置,设计一种利用磁旋转编码器AS5045测量电机转子位置的方法,并通过对电机转子位置初始定位,实现了永磁同步电机转子位置的绝对角度测量.经实验证明,此方法设计简单,安装方便,获取的转子位置定位准确,测得角度实时性好,满足EPS系统对转子位置信息的要求.
EPS系统;永磁同步电机(PMSM);转子位置检测;AS5045
继电子技术在发动机、变速器、悬挂架和制动器等系统得到广泛应用后,汽车电动助力(EPS)转向已逐步取代传统汽车助力转向系统,成为世界汽车技术发展的热点[1].电动机根据电控单元的指令输出相应的扭矩,是影响EPS系统性能的关键部件之一,所以对电机的选型十分重要.随着近年来用于实时处理的DSP芯片的出现和普及,交流伺服技术中大量复杂的坐标变换、函数计算、参数调节等运算可在极短时间内完成,满足交流伺服系统实时运算的要求,使得交流伺服传动逐渐走向前台,取代了传统的直流电机[2].而永磁同步三相电机(PMSM)以其体积小、功率大、模型简单等优点脱颖而出,成为目前EPS系统的主流电动机.在基于PMSM的EPS系统中,获取实时的转子位置角度是系统工作的必要条件.只有获得精确、及时的转子角度位置信息,才能准确地将电机模型等效为dq坐标系的模型,也才能有效控制电机,从而实现EPS良好的工作性能.另外,人们对EPS系统性能要求越来越高,主动回正、线性助力等概念的相继提出,都需要获取准确的电机转子位置信息.因此,高效、及时、准确的转子位置测量方法研究势在必行.
1 常用转子位置测量方法分析
目前,测量转子位置的方法主要有:旋转变压器法、光电编码器法、磁旋转编码器法等.旋转变压器是电机转子位置测量的有效手段,曾应用在本文所涉及的EPS系统中,并获得了较好的转子位置信息.但在实验过程中仍有一些缺陷.首先,旋转变压器需要外部激励注入,这无疑繁复了系统硬件,不利于控制器小型化;其次,旋变输出信号需要复杂的滤波解调算法才能得到较为准确的转子位置信息,增加了系统软件的运算负担,并可能造成角度信息的延时;最后,旋变价格较高,增加了控制器成本.
光电编码器主要分为绝对式和增量式.绝对式光电编码器通过光盘编码,得到转子位置的绝对角度,但是由于其装置较为复杂,同样不利于EPS的批量生产和小型化;增量式光电编码器结构简单,响应迅速,但缺点是掉电后容易造成数据损失,而且有误差累积现象[3].
磁旋转编码器通过集成在芯片内部的霍尔传感器感应磁铁极性变化,并经芯片内部处理,得到转子转角的绝对角度信息.相比较于旋转变压器和光电编码器,其安装简便,价格低廉,适合工业生产;且通过串行方式向EPS电控单元输入数字化的转子角度信息,满足EPS系统对转子位置角度信息精确、实时的要求;另外得到的角度信息无需滤波解调,节省了CPU资源.
2 磁旋转编码器原理
本文选用AS5045作为磁旋转编码芯片.AS5045是一款无接触式的磁旋转编码器,可精确测量360°范围内轴转角度.芯片内部集成了霍尔器件、DSP、模拟前端和数字处理模块,其中霍尔器件感应外部磁场变化,通过数字处理输出12位精度的数字转角信息,并以SSI的方式传输给EPS的电控单元.在使用时,只需要将一块纽扣形磁铁固定在电机转子轴心上,并将芯片置于磁铁的上方或下方,即可方便地读出转子转过的角度.图1即为AS5045的典型安装方式.
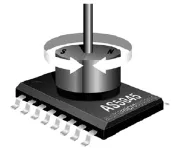
图1 AS5045典型安装示意图Fig.1 Typical install of AS5045
本文采用MC56F8367作为EPS系统的电控单元,该DSP具有串行外设接口(SPI),能够处理AS5045的绝对角度信号.
3 安装位置的初始定位
对AS5045安装位置初始定位的主要目的是获得电机转子实际位置与编码器输出角度之差,据此才能使AS5045输出的绝对角度与电机转子实际角度对准标定[4].
通过AS5045的安装方式可以看出,由于安装时磁铁、芯片和电机转子位置的随机性,导致编码器输出的角度与转子实际位置不一致,其关系如图2所示.
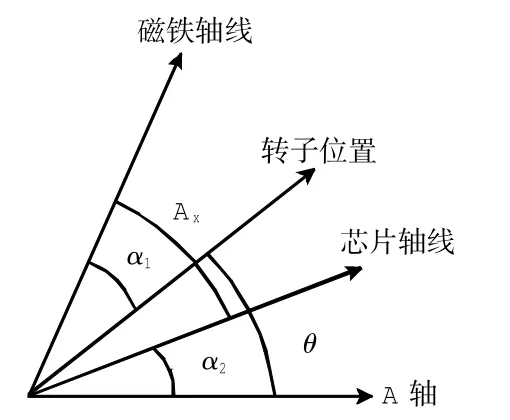
图2 磁铁、芯片和电机的相对位置示意图Fig.2 Diagram of relative position between magnet,encoder and motor
图2中:θ为转子位置角度;Ax为编码器输出角度;α1为磁铁磁极轴线与转子的夹角;α2为芯片轴线与电机定子A轴的夹角.由此可得转子位置角度,如式1所示.

由于AS5045轴线与定子保持相对静止,磁铁轴线与转子保持相对静止,故式(1)中α1-α2为一常数.为求得α1-α2,可令电机转子位置角度θ=0,此时得式(2):

即在电机转子位置角度θ=0时,磁旋转编码器AS5045的读数Ax=θ0=α1-α2,此时的θ0即为电机转子实际位置与编码器输出的差值.
为得到θ0,文献[5]提出了一种基于获取反电动势过零点的方法对电机进行初始定位,但是在电机低速或零速状态下,反电动势较小,对采集模块的精度要求较高,不易实现;文献[6]与文献[7]均使用高频注入法对转子位置进行估算,可获得较为精确的电机转子位置,但是由于该方法的实验过程较为复杂,不适用于实际工业生产.文献[8]提出了一种磁定位法来确定转子的初始位置,通过给定电流矢量观察电机转动方向,同时统计增量编码器的输出脉冲,多次试验后转子位置与设定电流矢量方向基本吻合,此方法可以测量出转子的初始位置,但是需要多次试验才可得出较为精确的角度初始值.在此提出一种简便的方法对永磁同步三相电机转子位置进行初始定位.
由于转子位置与三相定子的输入电流有关,故考虑一种强制给三相定子加电的方式,使转子在三相定子产生的磁场作用下,在预期的位置达到力矩平衡.具体原理如下分析.
永磁同步三相电机dq轴下的电磁转矩方程如式(3)所示:

式中:p为电机极对数;K为电磁转矩系数;Lq与Ld为dq轴上的电感量;id、iq分别为d、q轴上的电流.由式(2)可以看出,电磁转矩的方向与iq同向,于是在电机空载时,当转子处于平衡位置,电磁转矩即为0,如式(4)所示:

易得此时iq=0.设此时id=C为一定值,如式(5)所示:

旋转坐标系与三相坐标系关系可用式(6)表示:
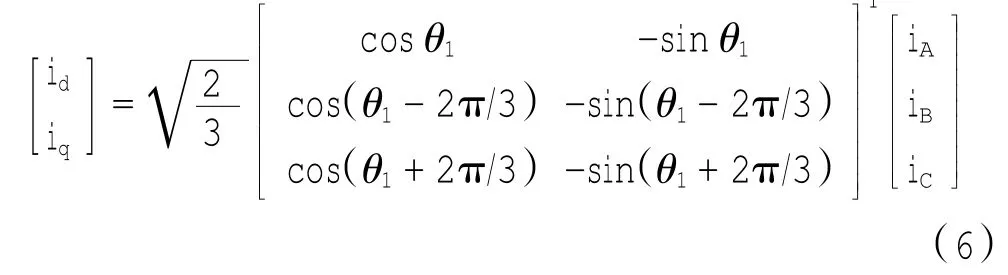
式中:θ1为转子N极与A相正方向的夹角;iA、iB、iC分别为电机的三相定子电流.
欲得到转子在θ1=0达到平衡时三相定子加电方式,可令式(6)坐标变换矩阵中θ1=0,并将式(5)代入式(6),即可得到三相电流间的关系如式(7)所示:

因此若按照式(7)所示的方式对三相定子施加电流,即式(8)所示的方式对三相定子强制注入电流,在电机转子达到平衡位置时,即可认为此时转子位置角度θ=0:

在实验中,需要一台直流电源,将其正极与电机A相相连,负极与B、C相同时相接,如图3所示.
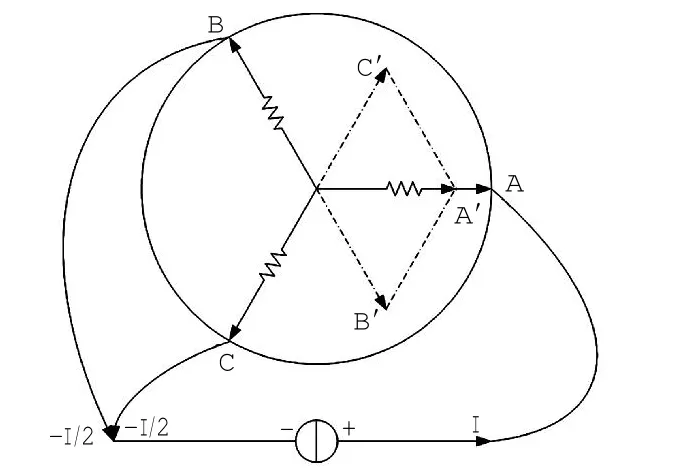
图3 三相定子电流注入示意图Fig.3 Diagram of appling current to 3-Phase
需要注意的是,直接将普通直流电源连接电机会造成过流,从而对实验设备造成极大损害,此处使用MOTECH生产的LPS-305直流电源,此直流电源有限流功能,直接与电机连线其电流不会超过设定上限.实验中设置上限电流0.5 A,故而不会因电流过大而损害实验设备.另外在加电过程中,电机须无负载,这样才能对电机转子零位准确定位.
图3中:A、B、C分别为电机的三相定子;A′、B′、C′分别为三相定子通电后产生的磁场,I则为限流电源的电流上限,通过将电源的正极与A相相连,B、C相与电源的负极相连接.由图3中各相产生的磁场A`、B`、C`经矢量合成易知,电机内部空间磁场的方向指向A相正方向,即可认为此时转子位置处于θ=0处.而此时,编码器AS5045的输出角度即为式(2)中的A0.为使编码器输出的绝对角度与实际转子位置角度一一对应,根据式(3),转子位置角度的表达式如式(9)所示.

由于编码器为12位输出,输出数字范围是0~ 4 095,减去α1-α2后会有溢出现象,故需在小于0的部分加上4 095.
在整个初始定位过程中,无需手工调整编码器和磁铁的相对位置,操作方便可行.
4 电机转子角度测量
磁旋转编码芯片AS5045每次发出18位数字信息,包括12位转子位置信息和6位校验码,与EPS的电控单元通过SSI通信,输出转子绝对位置.在硬件上,只需要将AS5045的Do、SCLK、CSn引脚分别与DSP的3个I/O相连即可;在软件方面,只需要将时钟信号、片选信号发送给编码器,即可从Do口读出编码器输出的转子角度信息.
值得注意的是,通过磁旋编码器测量的转子位置信息为电机转子的机械角度,而EPS系统中电控单元需要的则是电角度,在此需将磁旋编码器输出转化为电角度;至于其关系可用式(10)表示.

式中:p为电机极对数;θm为转子机械角度;θe为电机转子电角度.
从上面的过程可以看到,只需在安装时确定编码器的初始位置,就可以方便读取出电机转子的绝对角度,并将其转化为EPS控制器所需要的电机转子电角度.
5 实验结果
实验采用7对极电机,DSP采用为Freescale生产的MC56F8367,在CodeWarrior环境下编译,并通过上位机来观察转子位置信号波形.注入电流法的实验波形如图4所示.
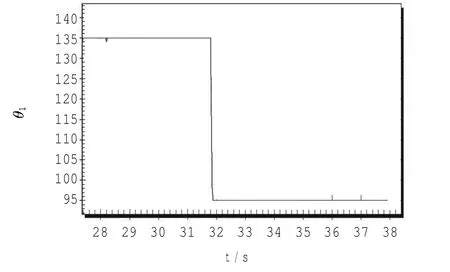
图4 注入电流法确定编码器初始角度Fig.4 Getting initial angle by applied current
实验中,先令转子位置处于任意位置,此时图4中的编码器的输出数值为135.在某一时刻(图中31 s至32 s之间),对电机的三相定子按式(8)所示方式施加电流,转子即转动至电机实际0位置,编码器的输出也随之变化.图4中可以看出初始定位后的编码器输出数值变为95,而该数值即为式(2)中的θ0.
为验证初始定位的效果,本文进行了如下实验。首先设定一匀速变化的信号,并将其作为转子位置信息,使得PMSM控制系统引导电机转子随该设定信号匀速转动;同时,读取即时的磁旋转编码器的输出角度数据,并与设定角度数据相比较.在磁旋转编码器的输出无误、且初始定位准确的情况下,设定角度数据应与编码器的输出角度数据相等.整个实验过程如图5所示.
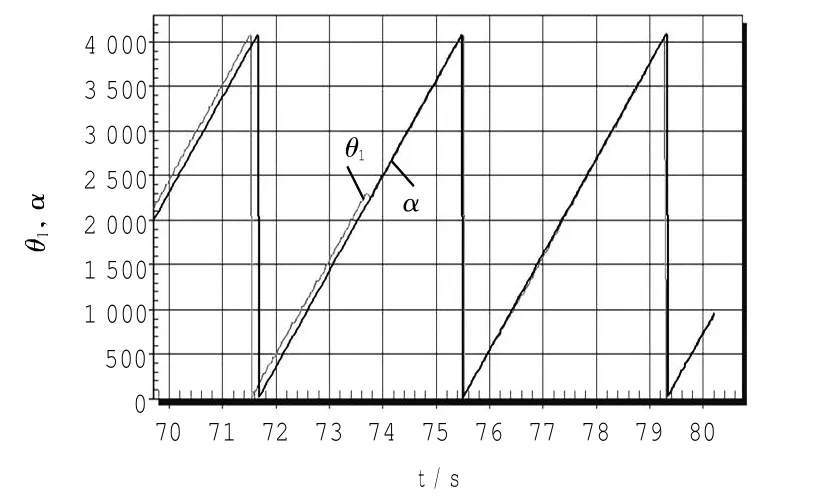
图5 编码器输出定位过程Fig.5 Output initializing progress of encoder
在图5中,θ1表示编码器的输出数值,α表示设定角度数值.电机转子的实际位置随α变化而变化,θ1也随之变化.在未初始定位以前,可以看出α与θ1并不相等;在t=73 s至t=74 s之间,对θ1进行初始定位,可看出定位后的α与θ1的波形基本吻合.
图5的实验说明基于磁旋转编码器的转子位置检测方案能够获得较为准确的转子位置信息,而本文所提出的注入电流初始定位方法也能够得到较为准确的定位效果.
6 结论
本文主要研究了永磁同步电机转子位置的测量方法,并对其安装进行了初始定位,目前已应用在EPS系统中.磁旋编码器法具有如下优势:
(1)获取得角度信号无需软件滤波,保证了角度信号的实时性;
(2)角度信号为数字信号,信号干扰较小,波形较为平滑,保证了信号的准确性;
(3)磁旋编码器在价格上更具优势,并且安装简便,易于工业批量生产.
[1] 林逸,施国标.汽车电动助力转向技术的发展现状与趋势[J].公路交通科技,2001,18(3):79-82,87.
[2] 陈荣,严仰光.永磁电机的转子位置检测与定位[J].中小型电机,2003,30(3):61-65.
[3] 于庆广,刘葵,王冲,等.光电编码器选型及同步电机转速和转子位置测量[J].电气传动,2006,36(4):17-20.
[4] 陈荣.基于增量式光电编码盘的永磁同步电机转子位置初始定位[J].电机与控制应用,2007,34(3):32-34,60.
[5] 季学武,何正义,张雪峰.磁旋转编码器在永磁同步电机位置测量中的应用[J].电气传动,2008,38(2):6-8.
[6] 万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计 [J].中国电机工程学报,2008,28(33):82-86.
[7] 周元钧,蔡名飞.改进的永磁同步电机转子初始位置检测方法[J].电机与控制学报,2010,14(3):68-72.
[8] 黎永华,皮佑国.基于磁定位原理的永磁同步电机转子初始位置定位研究[J].电气传动,2010,40(3):28-31.
[9] 李艳云,汪剑鸣,窦汝振,等.电动汽车电机驱动板旋变解调模块的自动测试方法[J].天津工业大学学报,2011,30(4):69-72,88.
Measurement method of PMSM rotor position in EPS system
JIANG Xiang1,WANG Jian-ming1,YUAN Chen-hu2
(1.School of Electronics and Information Engineering,Tianjin Polytechnic University,Tianjin 300387,China;2.School of Electrical Engineering and Automation,Tianjin Polytechnic University,Tianjin 300387,China)
A kind of method to measure the rotor position of permenent magnet synchronous motor in EPS system is designed by using magnetic rotary encoder AS5045.The system realize the measurement of rotor positon absolute angle after initial positon of rotor position.The experiment proves that the design is simple and easy to install,compared with other method,the output of this system is accurately and without delay,which is satisfied with the environment of entire EPS system.
EPS system;permanent magnet synchronous motor(PMSM);motor rotor′s position measurement;AS5045
TM351;TN712
A
1671-024X(2014)01-0055-04
2013-09-02
天津市科技支撑计划项目(12ZCZDGX04200);天津高等学校科技发展基金计划(Z0100709)
蒋 翔(1987—),男,硕士研究生.
汪剑鸣(1974—),男,博士,教授,硕士生导师.E-mail:wangjianming@tjpu.edu.cn
