无人滑行艇横摇运动模式实验分析
2014-03-09杨旺林徐海通杨松林
杨旺林,徐海通,杨松林,张 胜
(江苏科技大学船舶与海洋工程学院,江苏镇江 212003)
无人滑行艇横摇运动模式实验分析
杨旺林,徐海通,杨松林,张 胜
(江苏科技大学船舶与海洋工程学院,江苏镇江 212003)
以1艘无人滑行艇为模型,在船模不同吃水和倾斜角度的情况下进行横摇衰减试验,得到一系列横摇角速度变化曲线。分别建立线性、非线性横摇衰减运动模式系统辨识的数学模型,以系统辨识原理为基础,确立目标函数。改编基于Visual Basic 6.0的遗传算法系统辨识程序,通过2种系统对无人滑行艇横摇的试验数据分别进行辨识,验证所改编程序的可行性。选取典型的小角度和大角度的辨识结果,对2种数学模型下的辨识结果进行比较。得出对于无人滑行艇,非线性数学模型的辨识结果较好的结论。
无人滑行艇;横摇运动模式;船模试验;系统辨识
0 引言
滑行艇在高速航行时,仅部分艇底接触水面,其重量大部分靠水动力作用产生的升力支承。当滑行艇处于滑行状态时,吃水远小于静浮状态,遇到汹涛时会发生严重的颠簸,有时还会出现在2个波峰间飞跃的现象[1]。目前,对滑行艇的运动预报多集中在阻力和升力方面[2-4]。对于滑行艇水动力分析的方法主要有实验分析和数值模拟2种[5]。
横摇是船舶在波浪中最容易发生的运动形式,而且在各种摇荡运动中幅值最大。因此对于滑行艇横摇运动的预报同样很重要。模型试验是预报横摇运动的有效方法。而基于优化的系统辨识方法在三体船模、五体船模及复合型船模横摇运动[6-9]实验分析中均得到较为理想的应用。
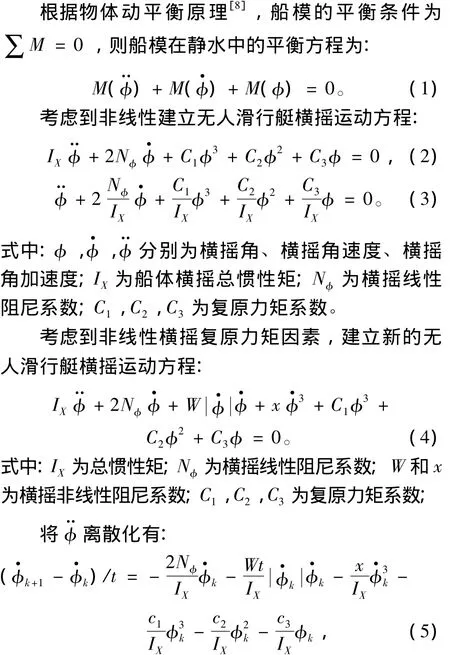
本文对无人滑行艇模型横摇运动模式的实验分析,根据横摇中动平衡原理,建立线性和非线性2种横摇衰减运动模式的数学模型,分别确定相关设计变量及目标函数,改编基于Visual Basic 6.0遗传算法系统辨识程序。通过2种系统对无人滑行艇横摇的试验数据分别进行辨识。根据实验曲线和辨识曲线的较好拟合情况、较小的辨识相对误差,验证所改编程序的可行性。根据所选小角度及大角度情况下,非线性数学模型辨识结果较好,得出非线性数学模型更适合于分析滑行艇静水横摇衰减运动的结论。
1 无人滑行艇实验模型及实验内容
1.1 实验模型
本次实验选用江苏科技大学船模室的1艘无人滑行艇模型,其主尺度见表1,横剖面见图1。

表1 无人滑行艇模型尺度参数Tab.1 Unmanned planing boatmodel scale parameter

图1 无人滑行艇模型横剖面图Fig.1 The Cross-sectional view of the Unmanned planing boatmodel
1.2 实验内容
试验在江苏科技大学波浪水池中进行。其步骤如下:
1)将船模放置于水池中远离池壁,使船模处于正浮状态,待船模稳定后读取船模的初始角度;
2)给船模施加外力,使船模向一侧倾斜角度φ(5°,10°,15°,20°),释放外力的同时利用 Mti- G软件开始采集数据,船模自由横摇直到再次稳定后停止采集数据。读取Mti-G软件读取的横摇角度数据;
3)变化船模排水量 (0.029 56m3,0.049 56m3),重复步骤1和步骤2;
MTi-G是1个集成GPS信号的微型惯性测量系统。通过内部微处理器的处理,输出姿态和航向信息。通过实时卡尔曼滤波提供准确的位置和速度信息。
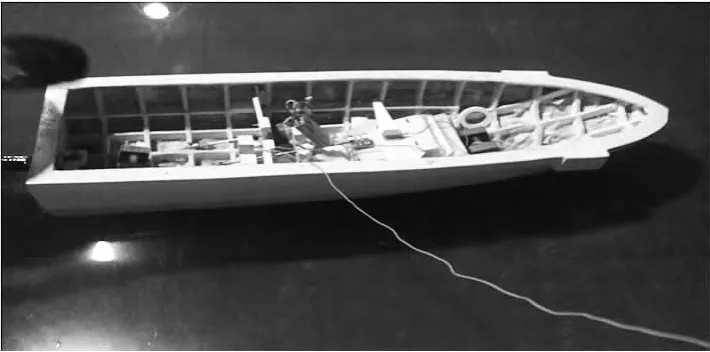
图2 无人滑行艇横摇自由衰减实验Fig.2 The hydrostatic experiment of roll

图3 MTi-G微型AHRS惯性测量系统Fig.3 Mti-GMicro AHRSSystem
2 无人滑行艇横摇运动辨识模型及辨识方法
基于以上数学模型,改编基于Visual Basic 6.0的遗传算法系统辨识程序。遗传参数的设定采用实数编码,每个基因长度为20,初始种群数为300,迭代次数为4 000,交叉率为0.8,变异率为0.10。
3 实验结果分析
3.1 分析方案
以线性、非线性数学模型的辨识系统,分别对初始倾角为5°,10°,15°,20°时所采集数据进行系统辨识,获得辨识数据。将所获辨识数据分别与相应实验数据拟合。
1)选取初始倾角5°,20°,分别作为小角度和大角度横倾的代表。
2)在初始倾角为5°时,对比2个数学模型即线性、非线性的辨识、拟合结果,以拟合曲线和相对误差为对比标准。
3)在初始倾角为20°时,对比2个数学模型即线性、非线性的辨识、拟合结果,以拟合曲线和相对误差为对比标准。
4)分析以上对比得出结论。
5)对结论作初步理论说明。
3.2 分析过程
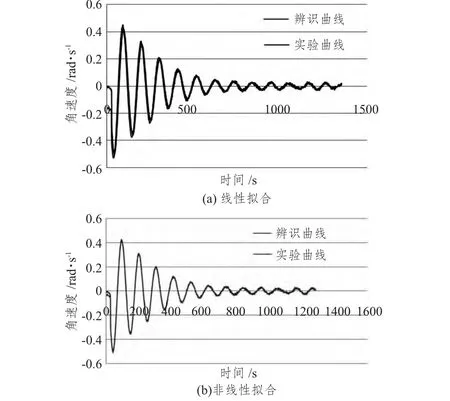
图4 5°自由横摇衰减时对角速度曲线Fig.4 Roll angular velocity decay correspond to angular velocity at5°
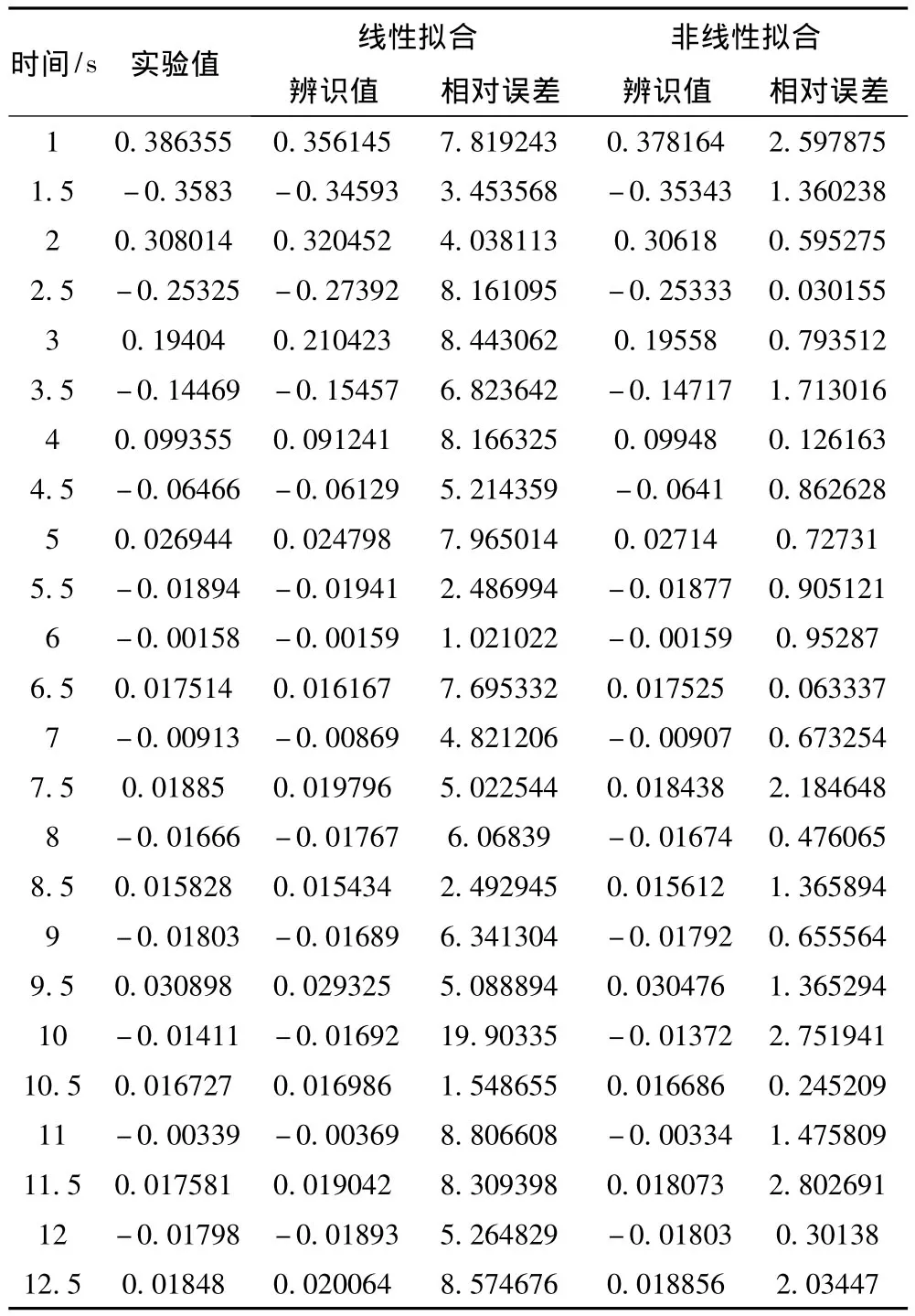
表2 5°自由横摇衰减时线性、非线性误差对比Tab.2 The error comparison of the linear and nolinear fitting curves of roll angular velocity decay correspond to angular velocity at20°
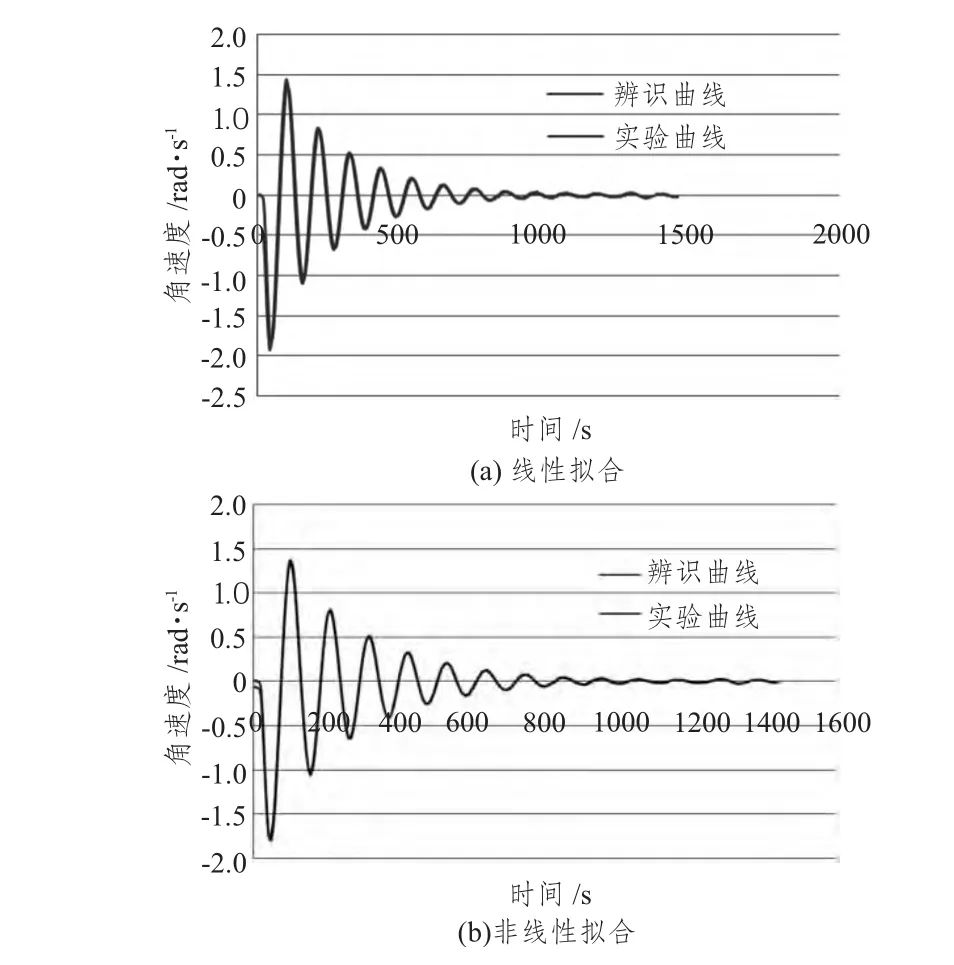
图5 20°自由横摇衰减时对角速度曲线Fig.5 Roll angular velocity decay correspond to angular velocity at20°

表3 20°自由横摇衰减时线性、非线性误差对比Tab.3 The error comparison of the linear and nolinear fitting curves of roll angular velocity decay correspond to angular velocity at20°
当初始倾角为5°时,即小角度;初始倾角为20°时,即大角度。对无人滑行艇模型自由衰减运动的角速度曲线进行研究,比较线性、非线性数学模型下的辨识曲线拟合情况,可明显看到:非线性数学模型下的辨识曲线拟合较好,与实验曲线几乎重合。随机抽取某段时间内的实验值和辨识值求得其相对误差,线性与非线性情况下相比:线性的相对误差较大,在10%以内;而非线性的相对误差很小,均在3%以内。
对于线性、非线性数学模型所得不同结果,初步分析认为:对于无人滑行艇,沿首尾、型深方向曲率变化较常规型船大,且舭部防溅条突出于船体,因此漩涡阻尼等非线性阻尼较大,所以在建立数学模型对无人滑行艇的横摇自由衰减运动进行辨识时,必须考虑非线性阻尼,建立非线性数学模型,此点在发生大角度横摇时尤为必要。
4 结语
本文通过无人滑行艇横摇自由衰减运动实验,获得8组不同初始横摇角度和吃水的横摇角速度变化曲线。基于Visual Basic 6.0的遗传算法系统辨识程序,进行改编,以线性、非线性横摇衰减运动数学模型为变量,分别对所得到角速度变化曲线进行拟合。选取小角度5°为代表,大角度20°为代表,分别对比并分析2种数学模型下的辨识拟合曲线和相对误差,得出以下结论:
1)无人滑行艇静水横摇存在非线性阻尼;
2)对于无人滑行艇静水横摇衰减运动的辨识分析,非线性数学模型比线性数学模型好;
3)基于非线性数学模型改变的辨识程序适用于对无人滑行艇静水横摇衰减的分析。
[1]许蕴蕾.高速无人滑行艇的纵向运动分析与仿真研究[J].船舶,2011,22(1):21 -25.
XU Yun-lei.Longitudinalmotion analysis and simulation for high-speed planing crafts[J].SHIP&BOAT,2011,22(1):21-25.
[2]SU Yu-min,ZHAO Jin-xin,CHEN Qing-tong,et al.Numerical simulation of the planing vessel in regular waves[J].Journal of Ship Mechanics,2013(6):583 -591.
[3]张乔斌,尹成彬,吴开峰.无人滑行艇阻力近似计算方法对比研究[J].中国舰船研究,2012,7(3):25 -29.
ZHANG Qiao-bin, YIN Cheng-bin, WU Kai-feng.Comparison between ЦАГИ method and SIT method for resistance prediction of planing crafts[J].Chinese Journal of Ship Research,2012,7(3):25 -29.
[4]HASSAN G,MAHMOUD G.A combined method for the hydrodynamic charaterristics of planning crafts[J].Ocean Engineering,2008(35):310 -322.
[5]REZA Y,ROUZBEH S,MOSTATA S.Hydrodynamic analysis techniques for high-speed planning hulls[J].Applied Ocean Research,2013(42):105 -113.
[6]LIHui-lei,ZHU Feng,YANG Song-lin.Primary Analysis on Rolling Motion of Trimaran[C].Procedings of 2011Asia -Pacific Youth Conference on Communication(2011APYCC),Hangzhou,2011.
[7]王勇,杨松林,范凯.五体船横摇运动模式分析方法研究[C].2008年船舶水动力学学术会议暨中国船舶学术界进入ITTC 30周年纪念会,杭州,2008.
WANG Yong,YANG Song - lin,FAN Kai.Research on the analysismethod of rolling motion of pentamaran[C].Ship Hydrodynamics in 2008 Academic Conference of Chinese Academia into ITTC30 Anniversary Commemoration of the Ship,Hangzhou,2008.
[8]崔健,文逸彦,杨松林.一种新型复合三体无人冲翼艇的初步研究[C].第十六届中国国际船艇及其技术设备展览会暨高性能船学术报告会,上海,2011.
CUI Jian,WEN Yi- yan,YANG Song - lin.Preliminary research on a new tipe of compoun unmanned trisomy dram wing[C].The 16th China International Boat and its Technology and Equipment Exhibition and High -performance Ship academic Report,Shanghai,2011.
[9]马天宇,崔健,杨松林.三体船操纵与横摇耦合运动试验与分析[J].舰船科学技术,2012,34(11):24 -26,36.
MA Tian - yu,CUI Jian,YANG Song - lin.Maneuvering and rolling coupled motion test and analysis of the trimaran model[J].Ship Science and Technology,2012,34(11):24-26,36.
[10]赵连恩,谢永和.高性能船舶原理与设计[M].北京:国防工业出版社,2009.
ZHAO Lian - en,XIE Yong - he.High performance principle and the design of the ship[M].Beijing:National Defence Industry Press,2009.
Experimental analysis of rollmotion mode of unmanned p laning boat
YANGWang-lin,XU Hai-tong,YANG Song-lin,ZHANG Sheng
(School of Naval Architecture and Ocean Engineering,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In this paper,the author took an unmanned planting boat as a model and conducted a series of roll decay test on condition that the ship model was in different drafts and tilt angle.Finally,The author got a series of roll angular velocity curve and established respectively mathematicalmodel of linear and nonlinear roll decaymotion mode system identification.Based on the principle of system identification,the author established the objective function.Then the author adapted the genetic algorithm of system identification program based on Visual Basic 6.0,and through the two kinds of systems,the author identified respectively the test data of the rollmotion of the unmanned planting boatand confirmed the feasibility of the adapted program.selecting the identification result of typical small angle and large angle and comparing the identification result of the two mathematical models,the author drew a conclusion that for the unmanned planting boat,the identification result of nonlinearmathematicalmodel is better.
unmanned planting boat;rollmotion mode;ship model test;system identification
U674.942
A
1672-7649(2014)04-0027-04
10.3404/j.issn.1672-7649.2014.04.005
2013-07-22;
2013-08-13
杨旺林(1988-),男,硕士研究生,研究方向为船舶与海洋工程结构物设计制造。