小型无人直升机高度测量模块设计
2014-03-08赵松涛裴海龙
赵松涛,裴海龙
(华南理工大学 自主系统与网络控制教育部重点实验室,广州 510640)
在无人直升机的控制系统中,比较常用的是惯导与GPS的组合导航,GPS导航主要提供系统的位置、速度、高度数据,但GPS数据中的高度项数据可靠性一直很低,当前的控制系统采用高度计对GPS高度数据进行补偿,并采用扩展卡尔曼滤波器[1]EKF(extended Kalman filter)进行滤波。在进行高速机动飞行时,系统参数会以相当高的速度变化,这样对高度项的数据精度就提出了更高要求,现有高度计的精度无法满足要求,传感器必须要进行升级;无人直升机是一个高阶的非线性系统,系统本身传感器的误差漂移、载体机动引起的动态误差会给系统数学模型的准确建立造成困难,采用常规的卡尔曼滤波不能保证滤波的最优性。针对控制系统这2个方面的需求,在参阅了当前主流高度传感器的性能参数后,选取了一款测量精度比较高的高度计替换当前的高度计,并根据实验结果验证更新的必要性;在参阅了自适应卡尔曼滤波相关理论[2-4]后,这里选取一种带缩放因子的自适应卡尔曼滤波[5]AKF(adaptive Kalman filter)来改进滤波器。当前气压计的改进已经投入使用,而自适应卡尔曼滤波器也即将投入使用。
1 无人直升机系统简介
本文所用到的无人直升机是由无人机机械平台、飞控电子设备、飞控软件系统这3大部分构成的[6-7]。飞控电子设备是在一块以ARM7为核心的主控板上搭建起来的,外围包括惯性导航传感器、GPS导航接收仪、电子罗盘、气压计等飞机位姿感测模块,这些模块的数据传输到ARM主控板,经数据融合处理,传送给控制器,由控制器进行运算后控制飞机的飞行姿态。飞机既可以手控,也可以自控。手控模式时,机师可直接使用遥控器通过中继站向飞机发送遥控信号;自控模式时,只需通过地面站向飞机发送飞行目标,飞机即可按照预定的路线飞行。如图1所示为飞控系统结构示意图。
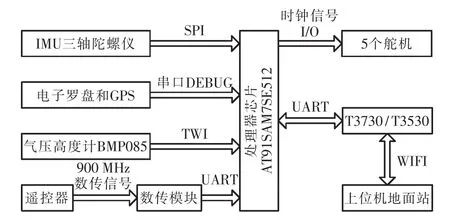
图1 系统结构示意图Fig.1 Structure diagram of system
自控模式下的控制器采用双闭环的控制器,如图2所示为无人机系统的控制框图。控制过程描述如下:在自控模式下,地面站路径规划给出位置和速度的参考值,经过外环PID运算后得到姿态角的参考值,将该值作为内环给定值与惯导系统参数对比,使飞机能够跟随给定的参考姿态角,进而按照路径规划中给定的位置运动。姿态信息采集主要通过三轴陀螺仪IMU和电子罗盘Compass,位置信息则由GPS和气压高度计BMP085获取。
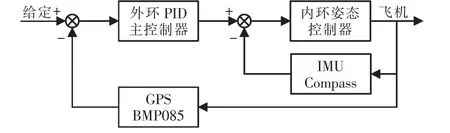
图2 控制器的系统框图Fig.2 Diagram of controller system
2 针对问题所作的改进
2.1 气压计改进
当前使用的气压计BMP085已经无法满足系统需要,需要对气压计升级。
目前应用比较多的气压计有以下几款:VTI公司生产的 SCP1000[8]、飞思卡尔的 MPL115An、博世的BMP085以及美国MEAS公司生产的MS5611。这几款芯片在GPS导航增强、航位测算、室内外导航、休闲、运动和健康监测、天气预报、垂直速度计算等方面都有应用,但是不同的传感器有着各自的特点,这也是选择传感器的依据。表1是这几款芯片在精度、工作温度范围、转换速度、封装方面的对比。
由表中数据可看出SCP1000在这4款气压计中测量精度最高,且较易于做防水,方便在硬件系统中安装,缺点是转换时间比较长;BMP085即原系统所用的传感器在测量精度、体积功耗、转换速度方面整体比较好,缺点是不易做防水;MPL115An的测量精度过低,可直接从选择中排除;MS5611的优点是转换速度很快、体积较小,但精度较差。
由于改进的目标是得到精度尽可能高的数据,所以这里选型以精度作为首要因素。综合其它因素,这里选择SCP1000来替换现有的BMP085,显然前者的精度远高于后者。
2.2 滤波算法改进
现有卡尔曼滤波器存在局限性,其根源在于卡尔曼滤波器使用的是常过程噪声方差阵Q和常观测噪声方差阵R,所以必须找到一种改进算法,能够根据目标运动状态的变化,自适应地调整过程噪声协方差阵Q,进而调整卡尔曼滤波增益。
这里采用一种自适应卡尔曼滤波方法[5],它引入一个缩放因子θ(k),该因子由观测值和先前状态估计值计算得到,因此包含了目标的机动信息。通过缩放因子θ(k)的变化使得过程噪声协方差阵Q(k)自适应地调整,从而使卡尔曼增益K根据目标的变化自动调整。
下面给出这种自适应滤波算法的方程:
无人机的状态方程可以等效为

θk即k时刻及之前的缩放因子构成的向量。
在k+1时刻,获得观测值Zk+1之前,可得状态值Xk+1满足正态分布 Xk+1~N(Xk+1,k,Pk+1,k),其中,

同时由式(2)可得,观测值Zk+1预测分布的均值矢量为

由式(2)及 Xk+1~N(Xk+1,k,Pk+1,k)可得 Zk+1预测分布的协方差为

可求得滤波器这一步的新息为

这样便有:

结合式(3)和式(4)便构成了带渐消因子的自适应卡尔曼滤波算法。
3 设计实现
经过上面讨论,基本确定了改进高度气压计的方案,即通过升级传感器,改进卡尔曼滤波器来提高高度项数据可靠性。
3.1 系统设计
鉴于在现有飞控系统中使用ARM7芯片的I2C口来读取气压计数据,这里仍采用这种接口方式来设计硬件。为了便于在现有系统上直接进行调试,将SCP1000做成一个单独的模块,通过接线与ARM7板相连。根据实际经验,I2C接口的稳定性比较差,所以在配置SCP1000模块的位置时,要使其尽可能地靠近ARM7中的I2C接口。在实验中发现,这样的考虑是非常必要的,所以在项目后期就直接把SCP1000集成在ARM7板上面。
为了比较明显地对比出更换芯片后的效果,要同时接收SCP1000和BMP085两款传感器的数据。此外,采用一款高精度的OEM4-G2差分GPS接收机接收的高度项数据作为基准值,这款GPS接收机工作于差分模式时,其高度的定位精度可以达到厘米级,所以完全可以将其数据作为基准值。
在传输传感器数据时,由ARM7的I2C口分时读取2款气压计数据,可通过定时器中断来实现,读取差分GPS数据时,则选用较为可靠的UART通信方式。
读取得到的数据需要经过滤波器的处理,通过上面分析,可设计相应的滤波器程序。如图3所示为程序流程图。
3.2 飞机试飞实验
在进行外场试飞时,必须要选择合适的天气。本实验分为数据采集和数据处理2个阶段。
在实验中,采集以下3种情况的传感器数据:
1)飞机静态放在地面上,采集此时BMP085、SCP1000、差分GPS数据,设定气压计以及GPS的基准值,并对比SCP1000和BMP085的零点漂移特性;
2)飞机起飞,在空中作纵向飞行,并做一些机动性较大的动作,如急停、加速爬升、迅速下降高度,测试气压传感器在飞机机动时数据的准确性。
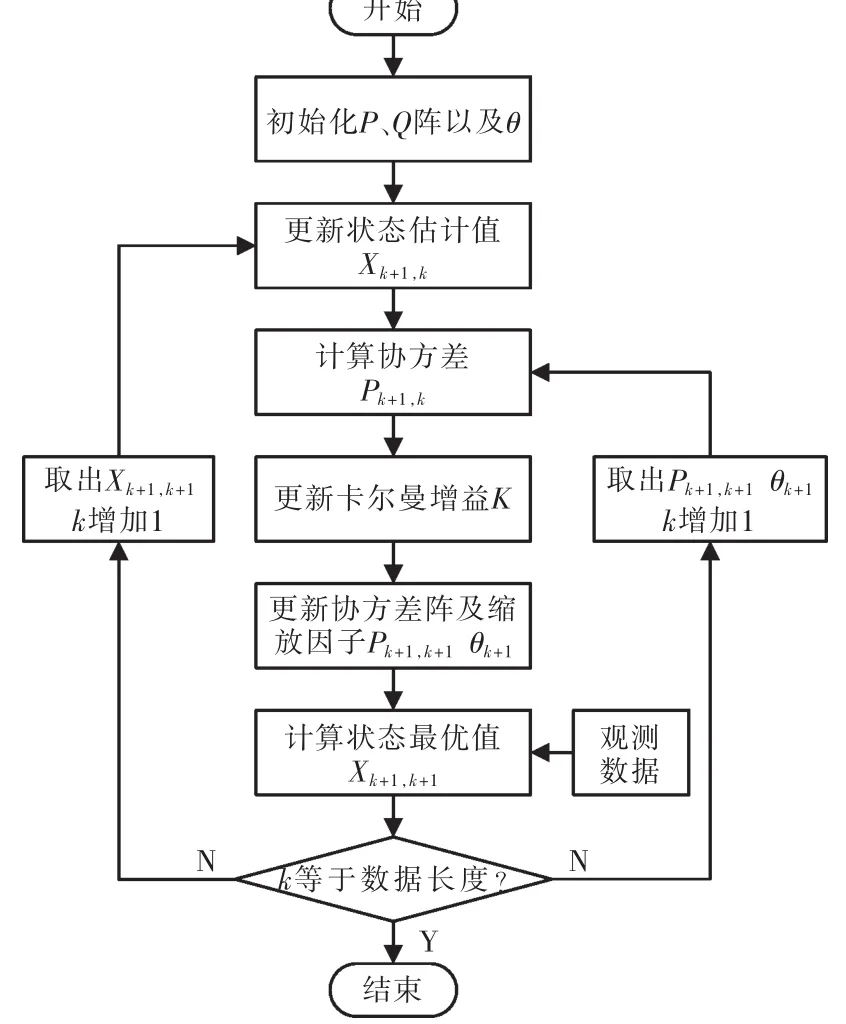
图3 程序流程图Fig.3 Flow chart of program
为使实验结论更有说服力,每个飞行姿态至少要采集3000组数据。
数据采集完毕后,对其进行滤波处理,首先对比2款气压传感器的测试效果,分析静态时二者数据的零点漂移,悬停时数据稳定性,机动时数据的准确性;然后对比滤波器的滤波效果,分别采用改进前后的滤波器对机动时SCP1000的数据进行滤波,以差分GPS高度数据为基准值,对比滤波后数据的可靠性,作出相应的均方根误差对比图,选择性能较好的滤波器。
4 改进效果
按照如上的方法进行实验,采集实验数据进行对比分析。通过对数据的处理发现,Q和R的取值不宜太大,否则会造成滤波器发散。在对比2套滤波器的滤波效果时,Q和R阵必须相同且合适,否则对比结果无意义。
图4所示为2种传感器在静态时的数据对比图,此时的参考高度为0。
图5所示为2种传感器在动态时的数据对比图,此时飞机的高度在动态改变。
从这2个图中可以看出,新的SCP1000传感器相对于原来的BMP085拥有更适合飞控系统的性能,选择其作为改进型高度计是可取的。
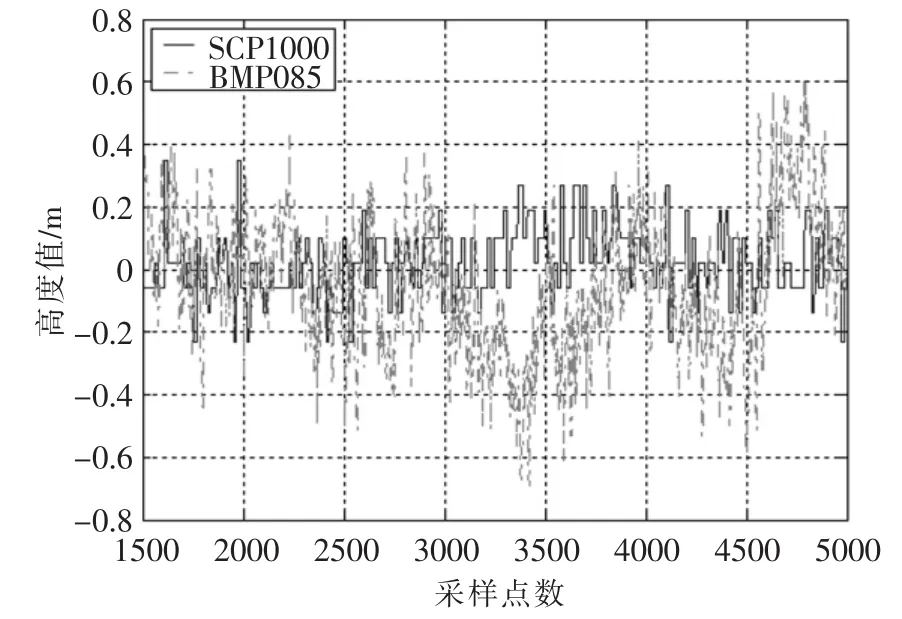
图4 两种传感器在静态时的数据对比图Fig.4 Static data comparison of the two baroceptors
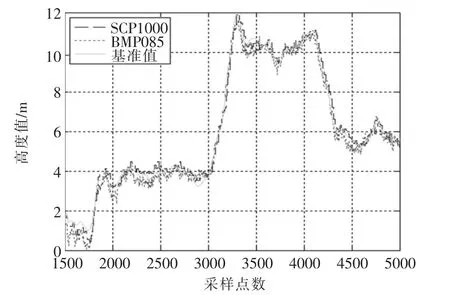
图5 两种传感器在动态时的数据对比图Fig.5 Dynamic data comparison of the two baroceptors
对比2种滤波器的滤波效果,从上面的分析可知,自适应卡尔曼滤波器的性能主要取决于对缩放因子θ2的估计,而θ2又决定于常数C,所以C的取值不能太大,否则小误差会导致较大的θ2值,从而使卡尔曼增益较大,降低了滤波器的性能。经过反复验证,这里C取值0.05。
图6所示为在同一组数据进行处理的效果对比。
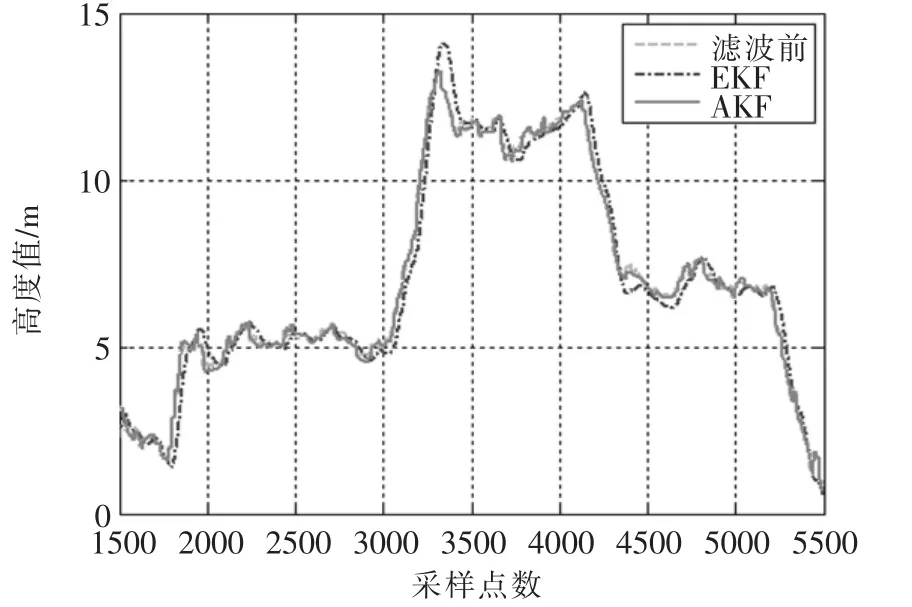
图6 两种滤波方式滤波效果对比图Fig.6 Comparison of the two filters’filtering effect
图7所示为2种滤波器处理后的数据相对于参考值的均方根误差。
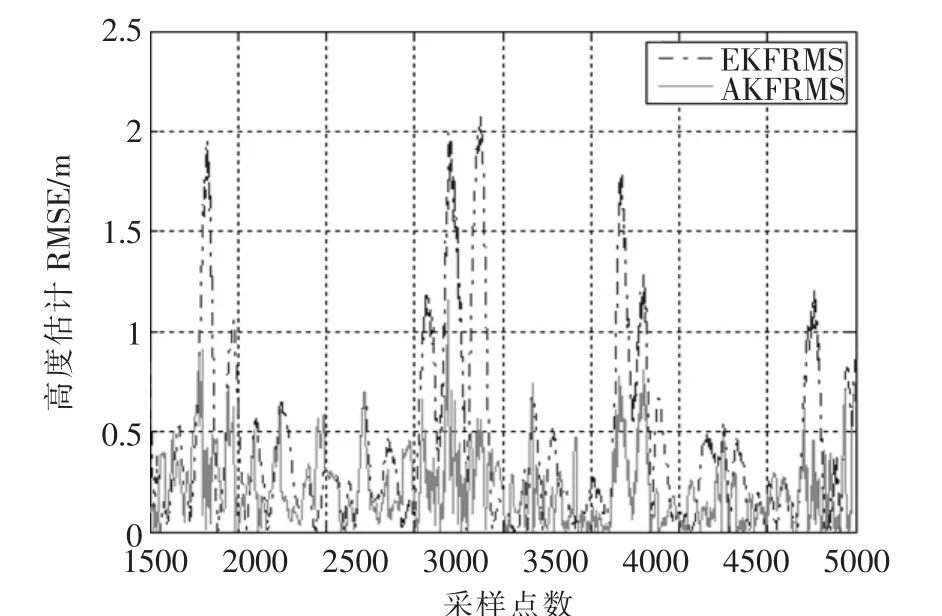
图7 两种滤波方式滤波均方根误差(RMSE)对比图Fig.7 Comparison of the two filters’root mean squared error(RMSE)
由图中可以看出,自适应卡尔曼滤波器在滤波性能上明显好于原有的滤波器,新的高度测量模块的优越性得到验证。
5 结语
新的高度计在精度方面确实要比原有的高度计有了很大的提升,它所测量的数据有更好的稳定性,这对于高速机动中的直升机来说是非常必要的。改进后的滤波器的性能相较之前有提升,引入的缩放因子可以在线调整卡尔曼增益,优化滤波性能。这些改进不仅使得现用的控制器输出更加精确,而且对于今后无人机的自主起降研究、超机动研究有着相当重要的意义。
[1] Greg Welch,Gary Bishop.An Introduction to the Kalman Filter[M/OL].University of North Carolina,2006-6-24.
[2] 范科,赵伟,刘建业.自适应滤波算法在SINS/GPS组合导航系统中的应用研究[J].航空电子技术,2008,39(3):11-15.
[3] 宁火军,潘鸿飞,金巧生.采用渐消卡尔曼滤波器防止捷联惯导系统滤波发散研究[J].战术导弹技术,2007(2):83-87.
[4] 辛英,于静.自适应卡尔曼滤波算法改进与仿真[J].中国科技信息,2011(22):59-60.
[5] 张谦,景占荥.一种过程噪声自适应调节的卡尔曼滤波算法[J].电子测量技术,2007,30(5):18-20.
[6] 刘栋炼.无人机飞控系统硬件设计与数据融合算法研究[D].广州:华南理工大学,2009.
[7] 陈勇,裴海龙.基于ARM小型直升机飞控系统设计与实现[J].计算机测量与控制,2010,18(2):329-334.
[8] VTI Technologies Corp.SCP1000 Series Absolute Pressure Sensor Product Family Specification[M/OL].http://www.vti.fi,2007-10.
“智慧工厂”之云存储(天津)专题产品对接座谈会在天津召开
2014年8月28日,由机械工业信息中心主办,全国离散制造业联盟、滨海新区智能制造联盟、天津市自动化学会承办,希捷科技支持的“智慧工厂”之云存储(天津)专题产品对接座谈会在天津召开。本次会议围绕“智慧工厂”这一主题,各企业行业、主管部门开展深入交流。天津市市委常委老领导杨竞衡同志,中国科学院院士、天津大学教授姚建铨先生,机械工业信息中心副主任、全国离散制造服务联盟秘书长刘功效副主任,天津市科协学会部副部长王婉莹女士等天津市高校、企业,外省离散制造业联盟多位领导和专家莅临现场参加会议,共计100余人。刘功效秘书长为大会致辞。
姚建铨院士为大会发表精彩演讲,从“智慧城市”谈到物联网的应用,生动阐述了传感器技术和大数据的发展趋势,介绍了第三次工业革命与智能制造的关系。演讲最后,姚院士以唐诗“居高声自远,非是藉秋风”鼓励与会各界专业人士为信息技术业发展贡献力量,展望了智慧城市、智能制造业发展的良好前景。
在听取了姚建铨院士的演讲之后,希捷云业务资深经理农天使先生在会上作了以“智慧的存储助力智慧的工厂”为题的报告。突出介绍了希捷智能云存储按需定制、智能选择、智能使用的特点,为“大数据”提出了解决方案。希捷品牌事业部业务发展经理陈玲女士在会上做了以“智慧工厂之私有云存储应用”为题的报告,从产品分类、APP应用、领先技术方面介绍了智能存储的个人解决方案和商用解决方案。
会议最后以专家访谈形式解答了参会专业人员关于存储资源共享、存储传输介质、智慧存储节能方式、私人数据安全性等方面的问题,讨论气氛热烈。通过此次座谈,使与会者对“云存储”、“智慧工厂”等新概念、新技术有了更加深入的了解,相关科技产品推广效果显著。
自动化仪表网应邀全程参与并报道此次会议。