光电自准直仪关键技术研究
2014-03-02
(1.东北大学信息科学与工程学院,辽宁 沈阳 110004;2北京航空航天大学自动化科学与电气工程学院,北京 100191)
光电自准直仪关键技术研究
凌东尧1沈东凯2
(1.东北大学信息科学与工程学院,辽宁 沈阳 110004;2北京航空航天大学自动化科学与电气工程学院,北京 100191)
自准直仪是利用光学自准直的原理,实现小角度测量的精密测量仪器,是一种应用广泛的瞄准及测量仪器。本文针对光电自准直仪的光路结构、硬件电路设计和数据处理算法三部分进行研究,,其中重点研究了四种光点位移检测算法,降低示值误差、实现宽量程、高分辨率的高精度光电自准直仪提供了关键技术支持和保障。
光电自准直仪;CCD;重心法;抛物线法
1 概述
自准直仪[1]是利用光学自准直原理实现的小角度测量的重要仪器,是角度测量最重要的仪器之一,应用非常广泛,在精密、超精密测量方面有极为重大的作用。尤其是在实现小角度的多维测量、非接触测量中具有显著的优点,被广泛应用于导轨平台的直线度、精密平台的平面度等精密测量领域,是机械、计量、科学研究、工业生产等部门必备的常规测量仪器之一,各级计量的定标都是需要通过自准直仪作为参考标准之一,还经常被用作各种零部件生产控制和质量检测的计量工具[2]。
目前,国内自主研制的光电自准直仪还尚未有成熟的产品上市,各研究所使用的多为国外进口产品。国外的自准直仪虽然精度高、性能好,但是价格昂贵且维护不便。本文基于工程实践自主研发了一种宽量程、高分辨率的双线阵光电自准直仪,其分辨率可达0.8″量程±0.6°,有着非常重大的实际工程应用价值。
2 整体结构设计
双线阵光电自准直系统利用了自准直原理,将测量反射镜反射光束分光分别照射在两个不同的线阵CCD器件上,使反射镜的二维角度变化转化为对应于两个线阵CCD器件上的线量变化,通过对CCD器件输出信号的采集,经过数据处理计算出线量变化量,利用自准直原理公式计算角度变化,从而实现高精度二维角度变化的测量。系统主要由光学部分,硬件电路部分和计算机软件部分组成。整个系统结构如图1所示。
系统的测量原理是:光源发出的光束经光学透镜组后形成平行光射向反射镜(反射镜位于被测物体上),反射镜将入射光束反射回光学透镜组,并照射在CCD器件上,在驱动电路的作用下,CCD器件将内部像素信号顺序输出,数据采集电路对CCD器件输出信号进行调理和采集,实现模拟信号数字化,最后将采集数据传入计算机,在计算机内进行数据处理和显示(或通过DSP处理核心对数据进行处理然后将最终结果通过液晶屏显示)。
3 光路结构设计
光源是光电自准直系统的重要组成部分,光源的发光强度、光强稳定性及光源的发热量等特性对于仪器的测量距离和测量精度都有很大的影响。光电自准直仪的光路原理如图2所示:
当光源发出光线照明位于物镜焦平面上的分划板,o点在物镜光轴上,那么由它发出的光线通过物镜后,成一束与光轴平行的平行光束射向反射镜,当反射镜面垂直于光轴时,光线仍然按原路返回,经物镜后仍成像在分划板上o处,与原目标重合。如图3所示。
当反射镜面与光束不垂直,而是有小偏转角度α,当平行光轴的光线射向反射镜时,光线按反射定律与原光线成2α返回,通过物镜后成像在分划板上的o′处,与原目标不重合而有X的位移量。根据三角关系可推算出: X=2f*tanα (1)
式中,α为反射镜偏转角,X为光斑回像位移,f为物镜焦距。
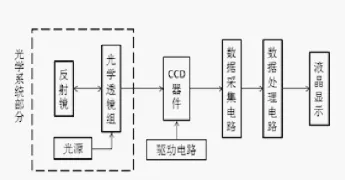
图1 光电自准直仪组成

图2 光路结构组成
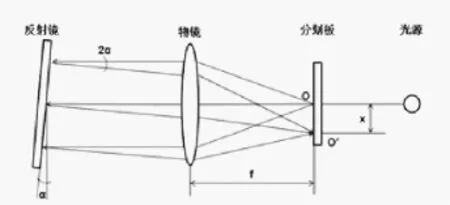
图3 光路倾斜图例

图4 改进型光路结构组成

图5 灰度分布图

图6 高斯分布图
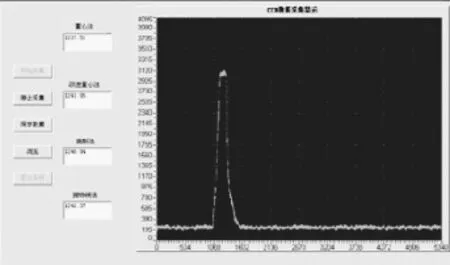
图7 CCD光电自准直仪实时测量软件

图8 光电自准直仪综合电路原理图

表1 TCD1500C型线阵CCD图像传感器指标
因为物镜是固定的,所以f是一固定常数。如果已知了X的数值,就可以根据式(1)计算出反射偏角α的大小。
基于此,本文采用的自准直系统结构进行一些调整。为了避免光路干涉,必须将光源从水平光轴上调离,故此应用分光棱镜使光源光路与探测器件位于分光棱镜相互垂直的两条光路上而互不干扰;为了实现测量反射镜二维角度变化,要增加一块分光棱镜,将回射光路分成两路,每一路上安装探测器件用来单独测量相应一维角度变化,原理图如图4所示:
从光源射出的光线经分光棱镜分光后,透过物镜为平行光并射向反射镜;反射光线再次经过物镜形成汇聚光线,通过分光棱镜1后被分光棱镜2分成光强相同、光路垂直的两路。两块探测器件(CCD)安装在分光棱镜光束输出的两路上,并且位于物镜的共扼焦面,反射光正好成像在探测器件(CCD)上。当反射镜垂直主光轴时,反射光线正好汇聚在两个探测器件(CCD)的中心位置;当反射镜有一个空间偏转时,反射光线的汇聚点都将偏离探测器件的中心位置,测量汇聚点偏离中心位置的距离,利用式(1)即可求出两个偏转角α、β的角度值。
4 数据处理单元
图5为实际光点局部的灰度分布图。
光点中心的位置的确定有许多方法,本文采用四种方法:重心法、改进重心法、高斯分布拟合法、椭圆拟合法进行分析比较。
4.1 重心法
重心法即灰度重心法,属于比较简单的一种定位算法,理论上计算出的结果有很高的精确程度,但实际的精度情况很复杂,容易受各种不确定因素的干扰影响精度,如背景干净程度、光点内灰度分布、光点形状、光点区域识别准确程度等,所以使用灰度质心作为定位亚像素中心精度略有欠缺。重心法原理如下式:
4.2 改进重心法
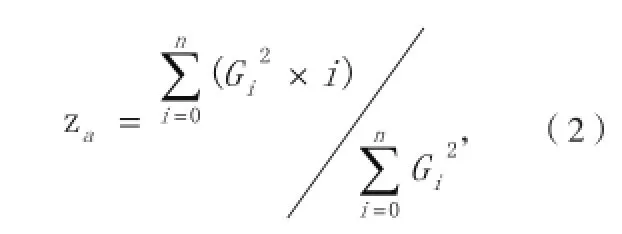
一般来讲,灰度值越大,像素对光点定位的贡献也就越大。在此基础上,把重心法所采用的线性关系推广为非线性关系,以灰度的平方作为权重来计算,即

重心法与改进重心法将光点区域的所有点都以加权的方式进行平均容易受到噪声的干扰,任意一个噪声点就有可能对结果造成比较大的影响,适合在噪声较低情况下的定位。
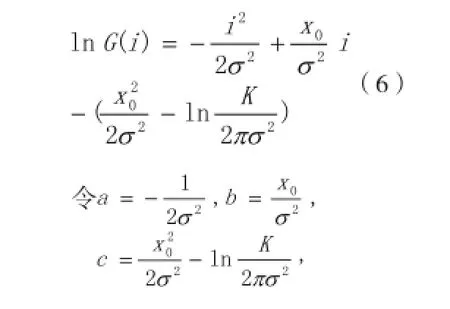
4.3 高斯拟合
对于一个LED光源来说,能量分布可以用理想高斯模型来描述,如图6所示:
其在x、y方向上的投影均为高斯分布。以x方向为例,发光点的能量分布数学模型为
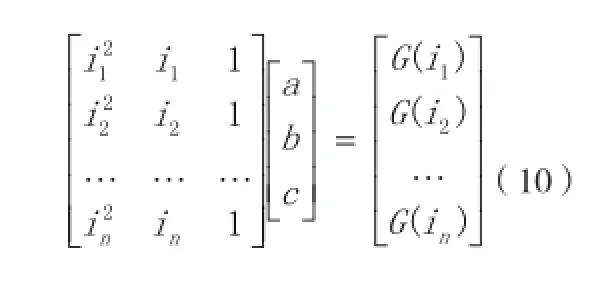
高斯拟合接近于实际情况,设矩形窗口内像素灰度分布同能量分布类似,为

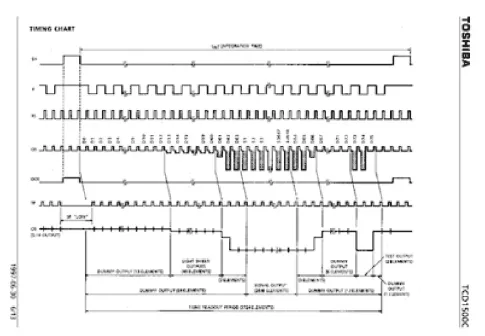
图9 TCD1500C的时序图
可得出


同理,可得到y方向中心位置。
高斯拟合算法通过拟合光点灰度实际分布情况,求得光点中心,具有比较高的理论精度。但这种方法需要进行广义逆矩阵的求解将影响计算速度。
4.4 抛物线拟合
光点的能量分布为中心高,越接近边缘越暗,可以用抛物线近似拟合法用抛物线近似拟合光点区域里的灰度分布。
设窗口内像素灰度符合

同理,可得到y方向中心位置。
这种测量方法用抛物面来近似能量分布,比用直接灰度或灰度的直接变换作为权重更加接近实际,且计算过程中没有计算对数,相对减少了计算量和误差累计;但仍需要进行广义逆矩阵求解,适用于实时性要求不高的情况。
4.5 实际测量与真实值比较
图7中,波形为5340个像素点的电压值,横轴为像素点个数,纵轴为像素点对应的电压值。可以看到,除重心法外,几种方法的测量结果差距在1个像素点以内,转换为角度在1″之内。
5 硬件电路设计及实现
目前,常用的光学传感器主要有以下几类:线阵CCD、面阵CCD、四象限探测器、PSD、CMOS等。本文采用双线阵CCD光电自准直仪系统,利用自准直原理,将测量反射镜反射光束分光分别照射在两个不同的线阵CCD器件上,使反射镜的二维角度变化转化为对应于两个线阵CCD器件上的线量变化,通过对CCD器件输出信号的采集,经过数据处理计算出线量变化量,利用自准直原理公式计算角度变化,从而实现高精度二维角度变化的测量。这样,就完美地解决了线阵CCD作二维测量时可能会不精确的问题。
本文拟选用TOSHIBA公司生产的TCD1500C型线阵CCD图像传感器,其基本指标如表1所示:
物镜焦距为870mm,自准直仪分辨率为
光电自准直仪的整体电路结构如图8所示:
光学系统部分透过分光棱镜的光线照射在CCD芯片上,通过CCD驱动电路正常工作的CCD产生相应的5340个敏感电压值并将这些数据发送给基于DSP2812的数据处理、采集电路,DSP2812将这些数据存放在片外RAM中并进行处理,将最终得到的角度数据通过RS-422转232发送到89C51单片机上;单片机起一个串口转并口的作用,把数据原封不动通过并口发送至液晶屏加以显示。
5.1 CCD驱动电路
CCD芯片的管脚中,SH是转移脉冲,它将感光元件产生的电荷信号转移到转移栅中;SP是像元同步脉冲信号,一位SP对应一个CCD光敏元输出信号;Φ是移位脉冲,它将转移栅当中的信号逐位转移出来;RS是复位信号;DOS是CCD信号输出;OS是输出信号补偿。
本文拟采用CPLD芯片,结合TCD1500C的时序图设计实现CCD驱动电路。图9为TCD1500C的时序图。
5.2 基于DSP2812的数据采集和处理电路
由于线阵CCD产生的输出信号是由DOS(信号输出)和OS(输出信号补偿)两部分组成的,故此,在将信号输入DSP2812之前要先对2路信号进行差分放大,再将得到的数据经由DSP2812存放于片外RAM中;将数据存好后,再应用上文中的各种软件算法对数据进行处理得到角度值,并通过RS-422转RS-232发送给液晶屏显示电路。
5.3 基于89C51的液晶屏显示电路
由于DSP2812输出的数据是通过RS-422串口发送的,而本论文选用的240128液晶屏模块只有并口接口,故此要用89C51作为一个串口-并口的过渡。89C51不对数据做任何处理,只是单纯的作为一个数据中转站,将数据发送至
液晶屏模块显示。
结语
本文设计并制作一个基于线阵CCD的光电自准直仪专用检测仪器。此自准直仪将使用两块线阵CCD传感器进行二维角度的测量,并采用DSP芯片进行数据采集和处理,并将数据传输到上位机上进行显示。DSP中将采用一些算法进行数据处理,上下位机之间的通信采用RS-422串口进行通信。仿真和试验结果都表明该光电自准直仪已经达到预定设计指标。参考文献
[1] 林玉池, 于建. 光电自准直仪现状与展望[J]. 宇航计测技术, 1999, 19(6): 30-32.
[2] 陈颖, 张学典, 逯兴莲,等. 自准直仪的现状与发展趋势[J]. 光机电信息, 2011, 28(001): 6-9.
[3] 张继友, 范天泉, 曹学东. 光电自准直仪研究现状与展望[J]. 计量技术, 2004, 7: 27-29.
[4] 瑚琦, 杨园园, 高鹏飞, 等. 基于面阵图像传感器的自动读值光电自准直仪[J].仪表技术与传感器, 2011, 9: 007.
[5]ZHANG Junjie, LI Zhengyang, YE Shenghua. Using Optical Zoom to Improve theResolution of Photoelectric Collimator. Chinese Journal of Sensors and Actuators.2011,1:50-52.
[6]Zeng Chao, Li Feng, Xu Xiang-dong.Characterisitics of optoelectronicposition sensitive detector and its application.OPTICAL INSTRUMENTS.2002,24(4):82-85.
TP20
:A
