基于CodeSys 风电机组变桨距控制策略研究
2014-03-02陆国君王贇
陆国君,王贇
(1.德国倍福自动化有限公司,上海 200436;2.中国船舶重工集团公司武汉凌久电气有限公司,武汉 430074)
0 引言
变速变桨距控制系统是构成风电机组的重要组成部分,近年来风电行业发展迅速,直接带动了该系统的研究和开发,该系统控制性能的优劣主要由所采用的控制策略是否适合与被控对象所决定。目前,实际工程中常采用常规的PI控制器控制输出桨距角,该控制器易实现,但有可能出现大超调现象,风电机组作为一种复杂的多变量非线性系统,如仅采用单一的控制很难得到满意的控制效果[1]。所以采用更适合机组的控制器对减小机组载荷、避免机械共振、最大限度的捕获风能及为电网提供良好的电能质量等方面起到了至关重要的作用。
1 变桨距控制器设计及建模
1.1 PID控制器
本文介绍的控制算法都基于传统的不完全微分PID控制算法,其特点是不但能抑制高频干扰,还克服了普通数字PID控制器的缺点,将数字调节器输出的微分作用能在每个运算周期里按偏差均匀的输出变化趋势,起到了真正微分的作用[2]。不完全微分PID控制算法为:

式(1)中,KP为比例增益;Tn为积分时间常数;Tv为微分时间常数; Td为滤波器系数。控制器框图如图1所示。
比例环节P:比例控制是一种简单的控制方式,控制器的输入与输出误差信号成比例关系。
积分环节I:控制器的输出与输入误差信号成积分关系。在控制系统中,如果进入稳态后存在稳态误差,则需要引入积分项。积分项主要取决于误差对时间的积分,随时间的增大,积分项也增大。这样,即便误差很小,积分项也会随着时间增大而加大,它推动控制器的输出增大使稳态误差进一步缩小,直到为零。因此,比例+积分的PI控制器能使系统进入稳态后减少稳态误差,这也是变桨距控制中常用的控制策略。
微分环节D:控制器的输出与输入误差信号的微分(误差的变化率)成正比关系。通常,控制系统在克服误差的调节过程中可能会出现震荡或失稳。其原因是由于存在较大惯性环节或者滞后环节。控制器中加入微分项,能预测误差变化的趋势,比例+微分的PD控制器能改善系统在调节过程中的动态特性[3]。
1.2 传统变桨距控制算法
传统风电机组的桨距角控制主要采用的是PI的控制策略,PI控制器具有数学模型简单,容易控制,响应迅速等优点,在实际应用中使用非常广泛,其控制器模型如图2所示,使用转速信号作为控制信号,信号输入后,先使用转速偏差陷波滤波器,滤除特定频率的转速干扰信号[4]。随即使用PI控制器进行控制,由于桨距角的变化对于风速而言是非线性的,如在额定风速附近,较小的风速变化需要桨距角给定一个大变化才能使输出稳定,因此在额定风速附近需要增大增益,针对此问题,一般整机厂家会设计多套PI参数供机组在不同运行状态时使用来[5]。
该PI控制器的不足是超调相对较大,调节过快,容易引起机组的振荡,桨距角的控制曲线较陡峭,易引起变桨距控制系统的执行机构机械疲劳,转速低时容易引起转速振荡,导致机组失去平衡,减少机组运行寿命。
1.3 优化后的变桨距控制算法
经过优化后的算法由两个PD控制器和一个P控制器构成,分别对发电机转速、桨距角及加速度进行控制。通过一定条件及运行状态的选择,有条件的使用这三个控制器作为输出,最终以桨距角形式发送给执行机构。
桨距角控制:一般在并网前,机组处于起机或自检状态时选用此控制器,因为此时发电机转速相对较低,还未稳定运行,程序内部反馈的发电机转速可能存在一定偏差,所以选用当前的桨距角作为控制变量能起到比较好的控制精度。再将输出的角度值经过低通滤波器,用于滤除高频角度干扰信号,并通过一定的数学关系转换输出桨距角,该控制结构如图3所示。
发电机转速控制:当机组稳定运行后,在额定风速附近,大部分时间的控制皆使用此控制器。使用发电机转速作为控制变量,在信号输入端使用低通滤波器,滤除瞬时的转速变化。PD控制器输出后再使用PT1低通滤波器使输出转速信号更为平滑。再通过数据转换将当前的转速输出转化为桨距角。控制器结构如图4所示。
发电机转速加速度控制:控制中实时将转速的加速度和转速控制器输出进行比较,当加速度大于额定值时,即转速偏差过大,则开始启用此加速度控制器进行调节。加速度控制器结构如图5所示。
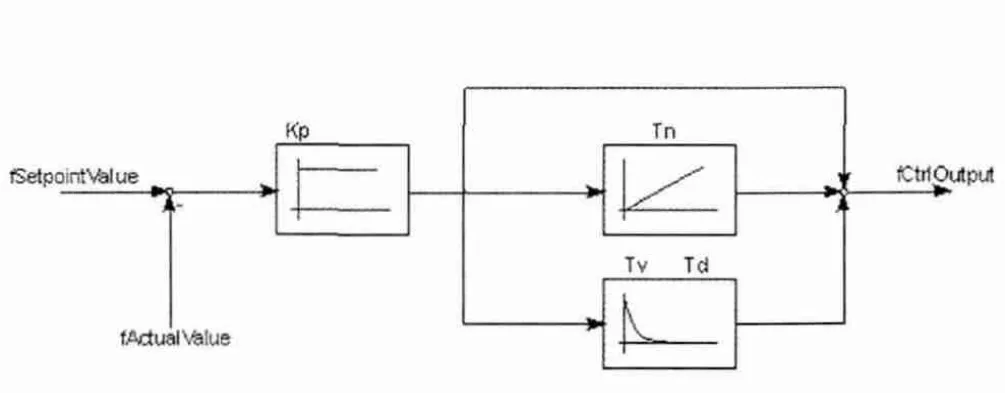
图1 PID控制器
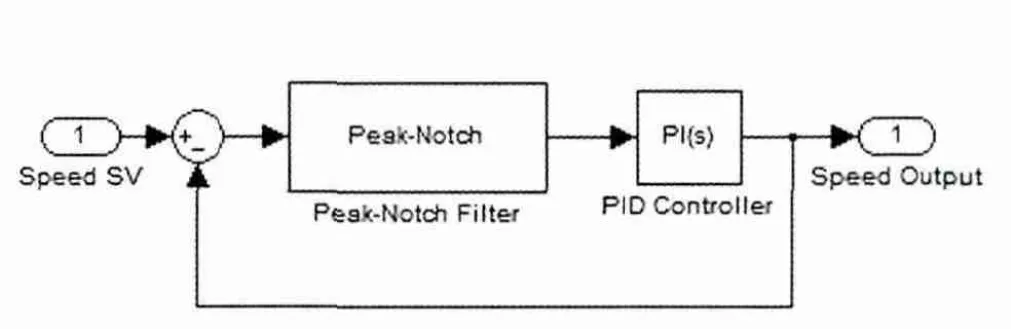
图2 PI转速控制器
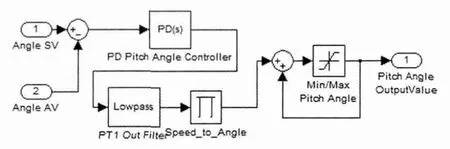
图3 桨距角控制器
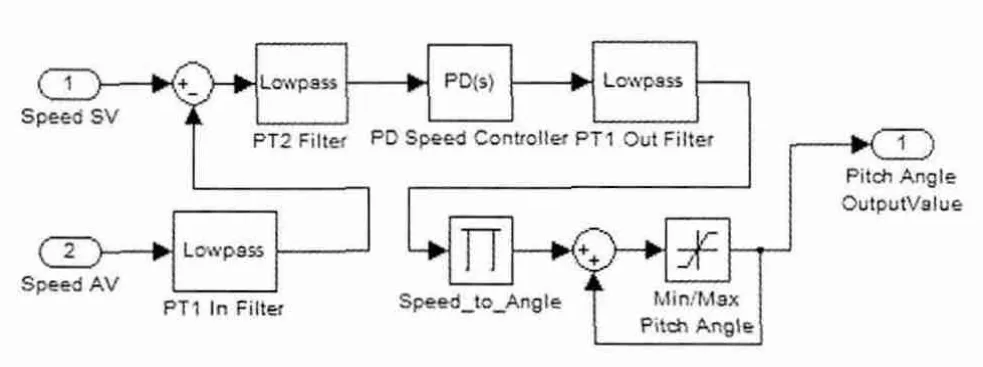
图4 发电机转速控制器
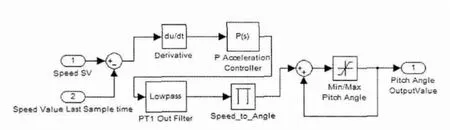
图5 加速度控制器
使用此控制器主要在发电机转速偏差过大或在启动阶段中需要快速度过机械共振区时起到了重要的作用,实现了对功率最大化及避免长期振动给机组带来的机械疲劳损伤。
2 变桨距控制模型的数据仿真与分析
本文研究的被控对象为1.5MW三叶片双馈变速恒频风电机组。采用基于PC的嵌入式控制器作为硬件,结合实际风电机组控制程序对桨距角的输出进行比较,使用基于CodeSys V2版本的软件平台进行仿真及分析。被控对象的主要技术参数见表1。
使用风速仿真程序对风速进行模拟,在高于额定风速的情况下观察机组的启动过程,使用本文介绍的2种不同的控制器对输出桨距角进行观察,如图6所示。
由图6可以看出,使用优化后的控制算法能够更平滑的处理桨距角的输出,以避免振荡给机组造成不必要的机械损伤。相比之下,传统控制算法在0度附近时调节过快,易引起机组的振荡,且控制曲线跟陡峭,易导致变桨执行机构疲劳运行。
3 结语
优化过的PD控制与传统的PI控制相比。优化后的PD控制器能让机组更平滑过渡运行,该控制器具有动态响应性好,适应性强,控制精度高等特点,有效减小风电机组在起机时的震荡,使响应曲线更平滑,且具有较好的鲁棒性和稳定性。

表1 风电机组的主要技术参数
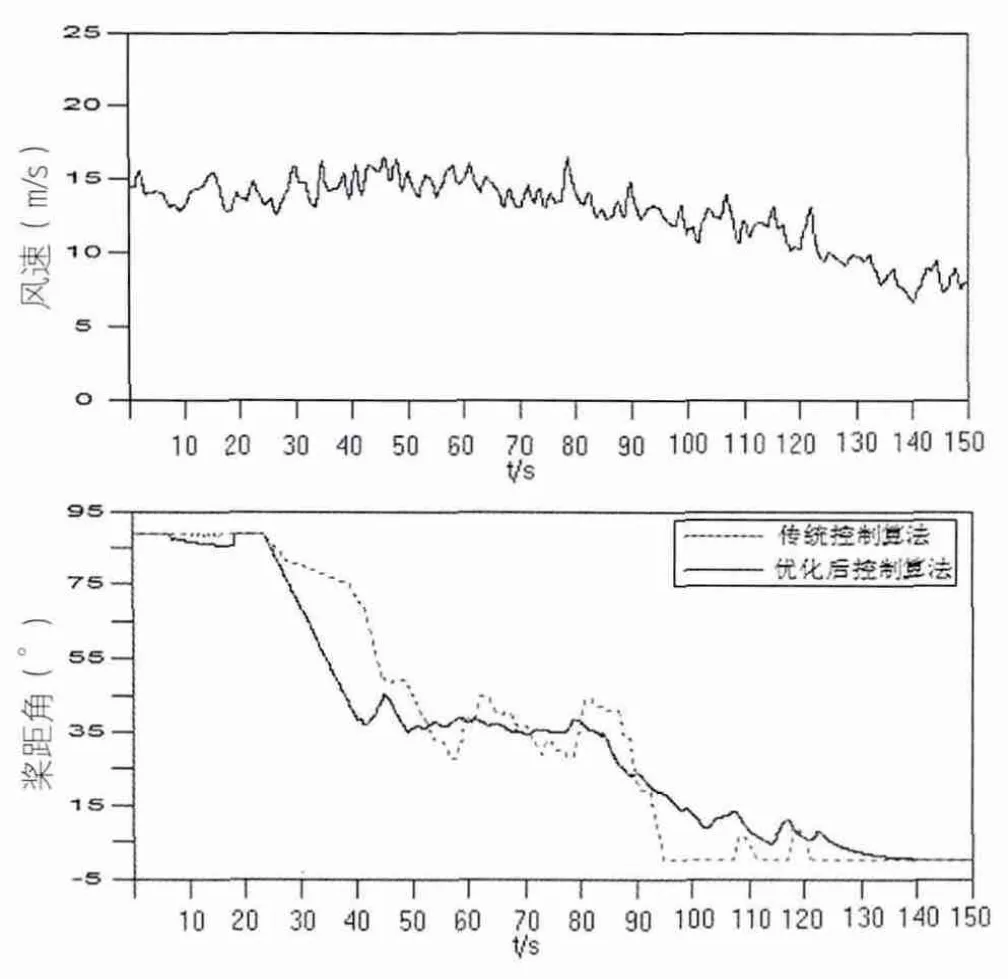
图6 桨距角仿真响应曲线
[1]王惠斌,徐建军,代文灿. 基于PID控制器的兆瓦级变桨距风力发电机组控制策略的研究[J]. 电气开关, 2009,3 :56.
[2]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002.
[3]郑波. 风力发电机变桨距系统研究[D].华北电力大学,2011.
[4]张庆利. 兆瓦级变速恒频风力发电机组电气控制系统的研发[D]. 哈尔滨理工大学,2007.
[5]林勇刚,李伟,叶杭冶,邱秀敏,金波,刘湘琪. 变速恒频风力机组变桨距控制系统[J]. 农业机械学报 2004,35(4) :111-112.
