船用燃气轮机发电系统建模与仿真研究
2014-02-27吕文超毕大强吕飞鹏
吕文超,毕大强,吕飞鹏
船用燃气轮机发电系统建模与仿真研究
吕文超1,毕大强2,吕飞鹏1
(1. 四川大学 电气信息学院,成都市 610065;2.电力系统国家重点实验室,清华大学电机系,北京 100084)
关注燃气轮机电气外特性,忽略其内部化学反应和热力循环,采用模块化建模方法建立了船用燃气轮机发电系统完整的数学模型,其中包括整流逆变模型、推进电机及螺旋桨负载模型。通过Simulink仿真,重点研究系统启动性能及动态特性;并对负载类型的影响以及三相短路故障进行了分析。结果表明该模型能够反映实际燃气轮机发电系统的运行特性,为研究船舶燃气轮机发电系统协调控制及多机并联运行奠定了基础。
船舶电力系统 燃气轮机 推进电机 建模仿真
0 引言
全电力推进已成为当今船舶动力系统的发展方向[1-2],其中原动机是电力推进系统的核心部件。现代燃气轮机作为原动机,以其机动性好、重量轻等优点,在船舶全电力推进系统中得到广泛应用[3-5]。船舶电力系统作为发电、输配电、用电紧密结合的独立电力系统,推进电机容量堪比发电机容量,动态负荷比重大,容易出现稳定性问题,研究系统动态特性时必须考虑原动机的调节作用,有必要对船用燃气轮机发电系统进行建模仿真研究。
目前,国内外对船用燃气轮机发电系统建模仿真的研究很少。现有的船用燃气轮机建模多基于热动力学原理[6-7],侧重研究燃气轮机内部化学过程,不适用于船舶电力系统的仿真研究。在微电网分布式发电系统中关于燃气轮机建模仿真研究方面,文献[8]把微型燃气轮机及电气部分当作一个整体,建立了微型燃气轮—发电机系统数学模型,研究了微型燃气轮机和逆变器的基本控制策略,以及负荷扰动时的动态特性;文献[9]考虑基本的恒压频比控制和PQ控制,建立了微型燃气轮机发电系统的整体模型,采用正弦脉宽调制(SPWM)逆变器,在动态负荷条件下对发电系统进行仿真,分析了微型燃气轮机与电力电子变流装置及负荷之间的相互影响。微网燃气轮机发电系统主要有孤岛运行和并入大电网两种方式,所带高速永磁发电机容量很小,与船舶电力系统的燃气轮机存在较大差异。
本文以适用于重载燃气轮机的Rowen模型为基础[10],忽略内部复杂的化学反应和热力循环,仅关注模型所表现的电气外特性,采用模块化方法建立了燃气轮机发电系统模型及其控制策略。此外,还建立了整流逆变、推进电机及螺旋桨模型。以上述模型为基础,对船舶电力系统负荷特性、推进电机的各种运行工况进行了仿真研究。
1 船用燃气轮机发电系统建模
1.1燃气轮机控制模型
船用燃气轮机控制模型如图1所示,主要包含转速控制、温度控制、加速控制等部分。三个控制环节分别产生三种燃料参考指令,通过低选模块,确定输入到燃烧室的燃料流量。
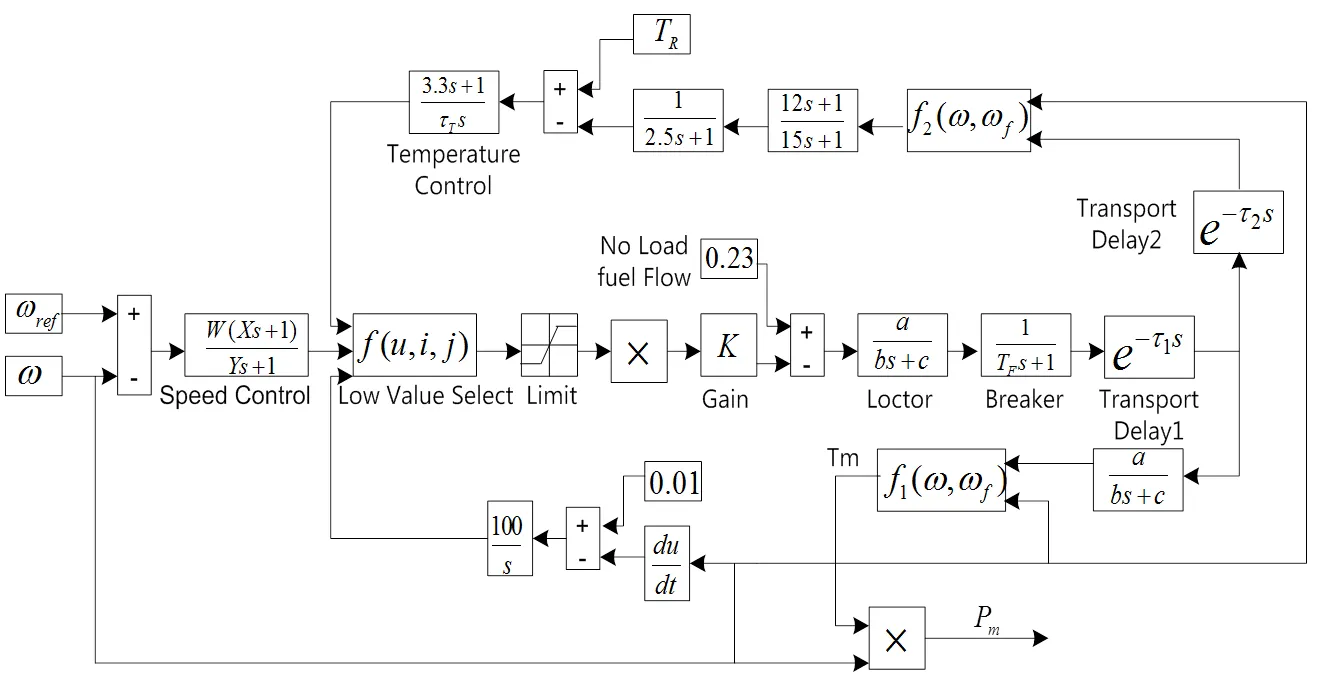
图1 船用燃气轮机控制模型
在船舶电力系统的并网运行中,转速控制系统是调节燃气轮机输出功率的最基本方法。无差转速控制系统只能用于燃气轮机孤立发电时,当用于并网发电时必须应用有差转速控制系统。通过调整转速基准变化,调整转速基准与实际转速之间的偏差,从而改变输出的燃料值,最终达到调整负荷的目的。本文采用有差转速控制系统,其传递函数式为
燃气轮机运行时,需要对排气温度进行控制使整个系统获得最优性能,这就需要通过调节压气机进口导叶安装角度来实现,IGV控制器输出其角度信号到其执行机构(一个惯性环节),执行机构完成改变IGV角度的任务。IGV调节也是一个比例积分调节器(PI),即

加速度控制系统的主要作用是在燃气轮机突然甩负荷时抑制动态超速,以减少对热部件的冲击。转速信号经过一个微分环节,计算实际加速度,然后将此加速度与基准值进行比较,得出的偏差输入到加速度控制器(也为一个比例积分调节器)其传递函数模型如图2所示。

图2 加速度控制模型
比例积分的结果产生加速度燃料基准。当实际加速度大于加速度给定值时,积分的结果减少燃料量,限制加速度的升高。
燃气轮机在没有负荷的情况下,为了维持正常的运行需要燃料量占了额定燃料量很大的比重,本论文取23%的额定燃料量作为微型燃气轮机的基荷。
此外,限幅环节的最大值限制作为转速、加速度和温度三者控制输出的上限;而最小值限制则是为了确保有足够的燃料流量使燃气轮机的燃烧系统正常工作。
图1所示燃料控制系统中,门阀定位器(Loctor)与燃料制动器(Breaker)的传递函数为:

压缩机—涡轮系统中,涡轮转矩输出函数f为

式中:W为燃料流量信号(标幺值);为发电机转速(标幺值)。排气温度函数f为

1.2整流逆变模型
整流器作用就是把由燃气轮机驱动的发电机发出的交流电流转化为直流,这里采用12脉波整流器,其详细模型在文献[11]中有阐述。逆变器的作用是接受整流器输出的直流,并将其逆变成所需频率的交流电。船舶电力系统作为一个孤立的网络运行,可以通过控制逆变器来控制负荷的电压及频率,而有功和无功输出则根据负荷的需要自动的调整;当该系统与电网并联运行时,由于电网的电压和频率是一定的,因此采用定功率控制可以控制其与电网的功率交换。本文研究燃气轮机发电系统作为一个独立的电力网络时的情况,逆变器采用PWM调制方法,使得逆变器出口的电压保持在660 V(电动机额定电压)。整流逆变环节模型如图3所示。

图3 整流逆变环节模型
1.3船用推进电机-螺旋桨负载模型
船舶电力系统区别于分布式发电系统的突出特点为螺旋桨负载特性。船舶推进模型中的推进电机、螺旋桨和船体三个部分共同构成船机桨系统[12]。螺旋桨负载特性指它的转矩、功率和转速之间的关系曲线。船舶在静水中航行(自由航行)时,仅考虑推进装置的回转部分运动和船的直线运动两种运动,它们相应的动力学方程为





系泊特性是满载的船舶在航速等于零时,所得到螺旋桨阻力转矩与转速之间的关系

建立螺旋桨负载时认为螺旋桨转速与推进电机相同,若二者有变速机构可取

K表示螺旋桨与推进电动机转速比。
2 仿真结果分析
按照图3所示的船用燃气轮机电力系统示意图,在Simulink平台下搭建上述模型,对船舶燃气轮机发电系统的启动过程、动态特性、负荷类型的影响以及三相短路故障工况分别做了仿真研究。

图3 船用燃气轮机电力系统示意图
2.1启动过程

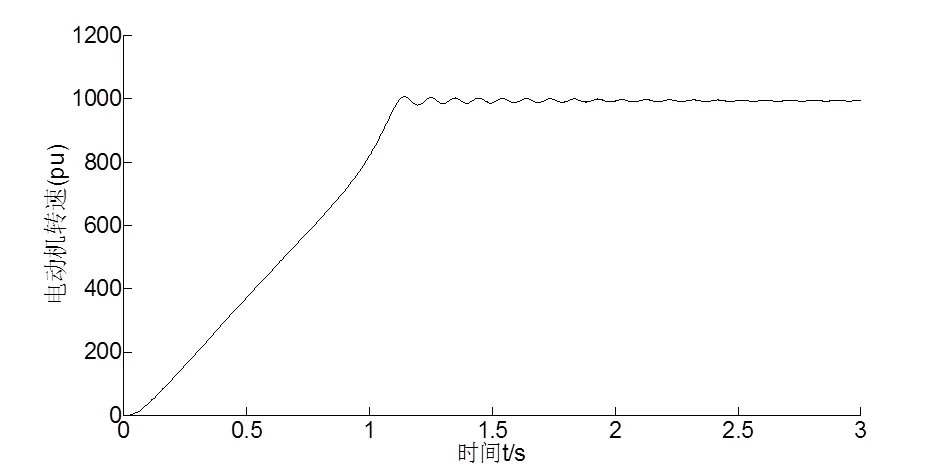
图4 推进电机带螺旋桨负载启动转速波形
2.2动态特性
研究燃气轮机发电机系统在负荷扰动时的动态特性,采用分级加载,一级卸载的方式,即初始空载状况下分别增加40%、30%、30%负载(功率因数0.8),待稳定后突卸100%负载,记录仿真波形如图7所示。

图5 直流母线电压

图6 推进电机端电压(工频)
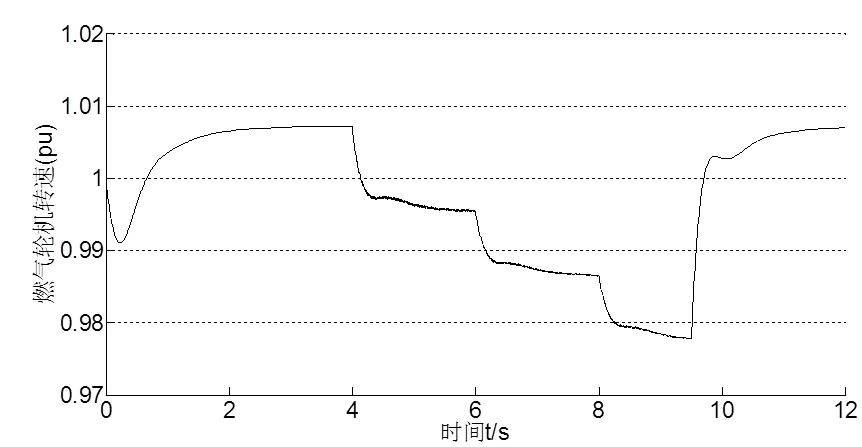
图7 燃气轮机转速变化
由图7可见,空载时燃气轮机转速为1.0072;负载增加40%时,转速下降至0.9955;继续增加负荷至额定时,转速下降至0.9777,并维持稳定,突卸全部负荷时,转速恢复至额定转速,稳定时间,整个过程转速虽有波动,始终保持在额定转速附近。瞬态调速率δ,稳态调速率δ分别计算如下:

参考GJB4000-2000中燃气轮机性能要求,见表1。δ、δ、、均满足要求。
2.3 负荷类型的影响
船舶电力系统是一个多负载类型的复杂电力系统,等效RLC负载通常占系统总负荷的30%,推进电机负载约为70%。本文研究负了荷类型对燃气轮机启动性能的影响,如图8所示。

表1 燃气轮机调速性能要求

图8 不同负载燃气轮机输出转矩
可见,当全部为等效RLC负载时,燃气轮机启动转矩较平稳;当70%为推进电机负载时,启动转矩出现了瞬时超过额定转矩1.2倍的情况,可见不同负载类型船舶电力系统的启动过程影响较大。
2.4三相短路故障
三相短路是船舶电力系统可能发生的最严重的故障形式,在发电机端模拟三相短路故障:1 s时刻发生故障,1.08 s将其切除,记录燃气轮机转速波形如图9所示。
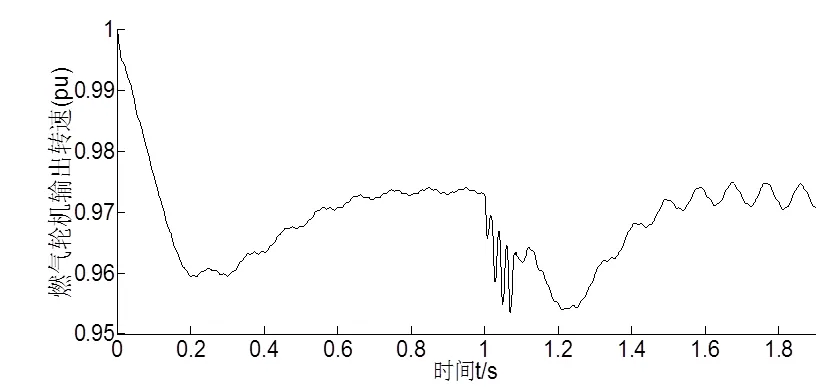
图9 燃气轮机转速
可见,故障发生时,燃气轮机转速迅速有跌落趋势,故障瞬间被切除,转速依然可以恢复稳定,且整个过程转速始终保持在额定值附近,说明所建燃气轮机模型有较好的调速能力,且为后续研究多机并联稳定性问题奠定基础。
3 结论
本文将燃气轮机及其电气部分当作一个整体,建立了燃气轮机发电系统完整的数学模型。仿真结果表明:燃气轮机按照给定的转速,通过转速调节、温度调节、加速度调节三种方式控制燃料流量,从而保持转速稳定在额定值,其稳态、瞬态调速率、稳定时间和转速波动率性能指标均达到GJB要求。根据推进电机的转速推算出螺旋桨转矩,可有效的模拟船舶的系泊特性,体现了船舶电力系统负荷特点。模拟三相短路证明了调速系统有良好的调速能力,可有效稳定燃气轮机转速。整个建模过程为进一步研究船舶燃气轮机发电系统协调控制以及并网研究奠定了基础。
[1] 王淼, 戴剑峰等.全电力推进船舶电力系统的数字仿真[J].电工技术学报, 2006, 21: 63-64.
[2] Wang Miao,Dai Jianfeng etal. Digital Simulation of Ship Power System With Electric Propulsion[J]. Transactions of China Electrotechnical Society, 2006, 21: 63-64.
[3] GAONKAR D N, PATEL R N. Dynamic model of microturbine generation system for grid connected/ islanding operation. Proceedings of the 4th IEEE International Conference on Industrial Technology, December 15217, 2006, Mumbai, India: 3052310.
[4] 周海军, 王薇等. 船用燃气轮机仿真研究[J]. 汽轮机技术, 2007, 49: 451-452.
[5] 杨涛.船用燃气轮机发电机组仿真技术研究. 哈尔滨工程大学学位论文, 2008.
[6] 黄向华, 张天宏, 丁毅. 船用燃气轮机建模技术研究[J]. 中国造船, 2005, 46: 32-33.
[7] 王纯. 燃气轮机及燃气—蒸汽联合循环调频控制仿真研究. 清华大学学位论文, 2006.
[8] J. F. Hansen, A. K. Adnanes, T. I. Fossen. Mathematical Modeling of Diesel-Electric Propulsion Systems for Marine Vessels. Mathematical and Computer Modeling of Dynamical Systems. 2001, 7: 1-33.
[9] 余涛, 童家鹏. 微型燃气轮机发电系统的建模与仿真[J],电力系统保护与控制, 2009, 37: 28-30.
[10] 刘君, 穆世霞等. 微电网中微型燃气轮机发电系统整体建模与仿真[J]. 电力系统自动化, 2010, 34: 85-87.
[11] ROWEN W I. Simplified Mathematical Representations of Heavy-Duty gas turbines. Journal of Engineering for Power, 1983, 105 (4) : 8652869.
[12] Marques G D. A Simple and Accurate System Simulation of Three-phase Diode Rectifiers [A]. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society, 1998, 1: 416-421.
[13] 罗彬. 船舶电力推进系统螺旋桨负载特性仿真研究. 武汉理工大学学位论文, 2009.
Modeling and Simulation of Gas Turbine Generation System for Shipboard Power System
Luv Wenchao1, Bi Daqiang2, Luv Feipeng1
(1.School of Electrical Engineering & Information,Sichuan University, Chengdu 610065, China;2.State Key Lab of Power System, Dept. of Electrical Engineering, Tsinghua University, Beijng 100084, China)
TP391.9 U664.131
A
1003-4862(2014)08-0013-05
2013-03-11
吕文超(1986-),男,硕士研究生。研究方向:船舶电力系统。
