不确定非线性网络控制系统的鲁棒保性能控制
2014-02-27崔凤新
崔凤新
集美大学诚毅学院,福建 厦门 361021
0 引 言
近20年来,无线网络控制系统由于其布线少、功耗低、安装维护简单等诸多优点[1-2]受到了越来越多研究者们的青睐.同时由于无线网络的引入,产生了许多新的问题,如网络诱导时延,数据丢包,量化误差等.另一方面,由于Takagi-Sugeno(T-S)[3]模糊模型数学描述证明的严格性,也有很多学者采用T-S模型来研究非线性系统[4].针对于非线性无线网络控制系统的稳定性分析和控制器设计方面取得了不少成果[5-11].然而,针对于不确定非线性网络控制系统的保性能控制的研究还比较少,因此,本文将考虑基于T-S模型的不确定非线性控制系统的保性能控制,同时研究了对数量化器的引入对系统性能的影响.
1 问题的描述及预备知识
考虑由带有不确定参数的T-S模型描述的非线性网络控制系统,表达式如下:
第i条模糊规则为
Ifθ(t) isMi1,θ2(t) isMi1,…
andθn(t) isMin,then
其中,θ1(t),θ2(t),…,θn(t)为规则前件变量,Min为模糊集,r为规则数目,x∈Rn是系统的状态向量,μ(t)∈Rm是控制输入,η表示允许的最大信号传输延迟,φ(t)是已知的初始状态条件.不确定矩阵AiΔ和BiΔ可以表示为
[AiΔBiΔ]=[AiBi]+[ΔAiΔBI]
[ΔAiΔBi]=GiHi(t)[EaiEbi]

根据文献[3]采用单点模糊产生器、乘积推理机以及中心模糊加权反模糊化,全局模糊系统可以转化为如下形式:
其中
其中Mim(θm(t))表示前件变量θm(t)对应于模糊值Mim的隶属度.在这篇文章中, 假设


采用单点模糊产生器、乘积推理机以及中心模糊加权反模糊化,上述的模糊状态反馈控制律可表示为在一个经典的网络控制系统中采样器是时钟驱动的,量化器、控制器、零阶保持器是时间驱动的,同时考虑到网络导致的时延和丢包,基于状态反馈的网络控制系统模型可以转化为:
BiΔKj(I+Dq)x(ikh)],
t∈[ikh+τk,ik+1h+τk+1]
x(t)=φ(t),t∈[t0-η,t0]
闭环系统性能指标为
Dq)x(ikh)dt
其中T1>0和T2>0是给定的对称正定矩阵.
定义1: 对上述和性能指标,如果存在一个量化的模糊控制律和一个正数J*,使得对所有允许的不确定性,闭环系统是渐近稳定的,且闭环性能指标值满足J≤J*,则J*称为不确定系统的一个性能上界,称为网络控制系统的一个量化的模糊保性能控制律.
2 保性能控制器设计

(1)
其中

那么量化模糊控制律是不确定系统的一个网络保性能控制律,控制器增益为Kj=ZjX-T,且闭环系统保性能指标满足:
证明: 选取Lyapunov函数

其中P>0,Q>0.
对V(T)求导可得:


其中,

由定理中式(1)可得
于是
因此
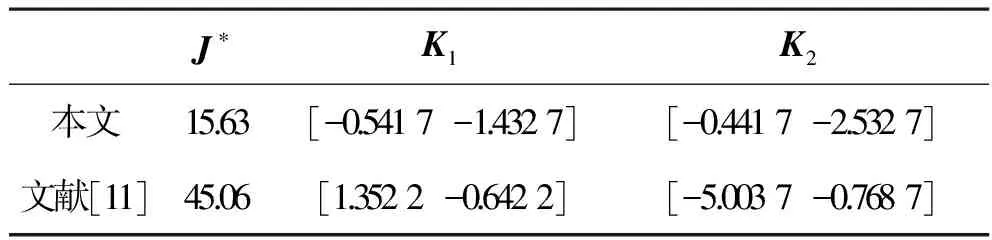
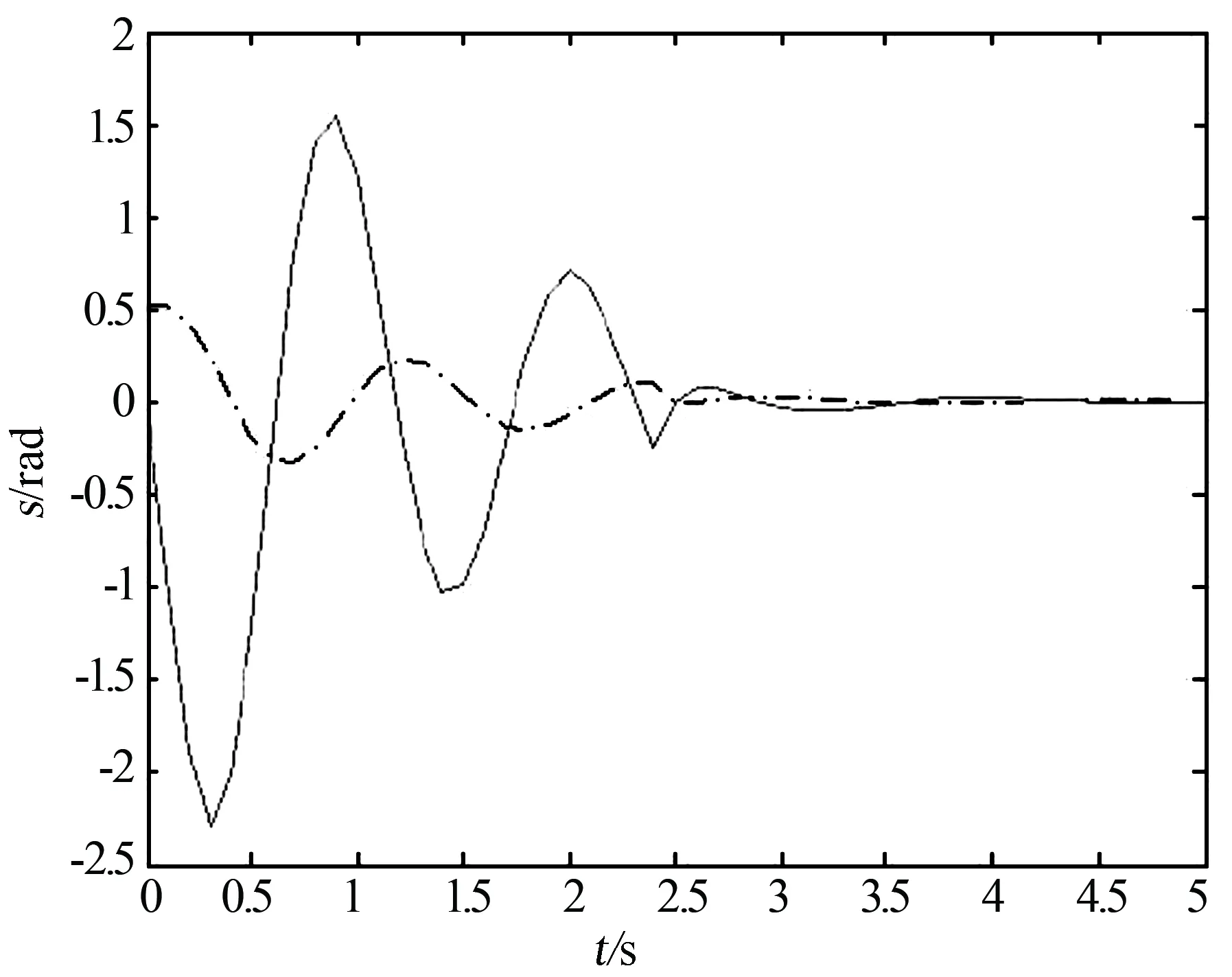
J 证毕. 考虑由网络控制的一刚性机械臂,该机械臂的一端通过旋转铰链连接至基体,运动方程表示如下: 其中 G1=G2=I Eb1=Eb2=0 在这个例子中,由仿真得到ηmax=0.129 2,取η=0.048.系统轨迹如图1所示.当不考虑T-S模糊模型中的不确定性时,在相同条件下与文献[11] 进行比较,结果如表1所示. 表1 系统性能比较 由表1中的比较结果可知,由本篇文章中定理得到的闭环系统保性能指标J*要优于文献[11]中的. 图1 系统轨迹 以上给出的一类非线性网络控制系统的保性能控制器的设计方法,非线性系统采用T-S模型来描述,同时考虑了无线网络中数据丢包、延时,建立了新的闭环系统的数学模型.并通过Lyapunov定理,给出了使系统保持一定性能的控制器的设计方法.同时还考虑了系统参数不确定性及对数量化器的引入对系统性能的影响.数值仿真验证了所提方法的有效性. 致 谢 本论文得到了柏建军博士的指导,在此深表谢意. [1] WALSH G C, YE H, BUSHNELL L G.Stability analysis of networked control systems[J].IEEE Transactions on Control Systems Technology,2002, 10(3): 438-444. [2] GAO H,CHEN T LAM J. A new delay system approach to network-based control[J]. Automatica,2008,44(1): 39-52. [3] TAKAGI T,SUGENO M. Fuzzy identification of systems and its applications to modeling and control[J]. IEEE Trans Syst Man Cybern,1985,15(1): 116-132. [4] TANAKA K, WANG H O. Fuzzy Control Systems Design and Analysis[M]. New York: Wiley, 2001. [5] WU J,CHEN T. Design of networked control systems with packet dropouts[J]. IEEE Trans. Automat. Control,2007,52(7):1314-1319. [6] ZHANG A,YU L. Output feedback stabilization of networked control systems with packet dropouts[J].IEEE Trans Autom Contro, 2007,52(9): 1705-1710. [7] ZHANG L,SHI Y,CHEN T,et al. A new method for stabilization of networked control systems with random delays[J].IEEE Trans.Autom Control, 2005,50(8): 1177-1181. [8] TIAN E,YUE D,PENG C.Quantized output feedback control for networked control systems[j].Inf Sci, 2008(178): 2734-2749. [9] YUE D,PENG C,TANG G.Guaranteed cost control of linear systems over networks with state and input quantizations[J].IET Control Theory Appl, 2006,153(6): 658-664. [10] CHEN P,YU C.Networked H_infty control of linear systems with state quantization[J].Inf Sci, 2007(177): 5763-5774. [11] CHU Hong-yan, FEI Shu-min, YUE Dong.Quantized guaranteed cost control for T-S fuzzy nonlinear networked control systems[J]. Control and Decision, 2010,25(1): 31-36.
3 数值例子



4 结 语