火箭自导深弹齐射方法研究
2014-02-27赵丹辉何心怡陈兆峰
赵丹辉, 何心怡, 陈兆峰, 朱 滨
火箭自导深弹齐射方法研究
赵丹辉, 何心怡, 陈兆峰, 朱 滨
(海军装备研究院, 北京, 100161)
以“海矛”火箭自导深弹为原型, 根据公开报道的参数结合一般性的假设, 建立了虚拟火箭自导深弹的弹道模型和自导检测模型, 确定了相应的齐射方法, 并以所建立的模型和确定的齐射方法为基础对多枚深弹的齐射命中概率进行了仿真及比较, 结果表明, 在典型条件下, 3枚齐射可达到最优费效比; 目标距离越近、机动程度越大, 齐射命中概率越高。
火箭自导深弹; 多枚齐射; 齐射方法; 最优费效比
0 引言
火箭自导深弹是一种新型近程反潜武器, 主要用于浅海反潜, 并可兼顾深海作战, 具备自导功能, 作战能力较传统无自导火箭深弹大幅提升。目前西欧和俄罗斯等各海军强国都研制了符合本国作战需求的火箭自导深弹, 尤其是德国的“海矛”火箭自导深弹, 可利用独特的舷侧阵自导系统在水平360°范围内搜索探测目标, 攻潜方式非常新颖, 代表了目前火箭自导深弹发展的最高水平, 阿特拉斯电子公司的大量试验验证了其具有较高的浅海反潜效能[1], 国内外对此类火箭自导深弹均很关注。
水面舰艇使用火箭自导深弹攻潜时, 通常向目标实施多枚齐射, 齐射方法的科学与否将直接对命中概率产生影响。因此, 有必要对火箭自导深弹的齐射方法进行研究。文中以“海矛”为原型, 根据公开报道的参数结合一般性的假设, 建立了虚拟“海矛”类火箭自导深弹(以下简称火箭自导深弹)的弹道模型和自导检测模型, 研究给出了该武器的齐射方法, 并对其齐射命中概率进行了仿真, 仿真结果表明, 所给出的齐射方法具有较高的命中概率, 可为此类武器的作战使用提供参考。
1 火箭自导深弹基本情况介绍
以先进的德国“海矛”为原型, 对火箭自导深弹作如下介绍[1]。
1.1 火箭自导深弹组成及结构参数
如图1所示, 火箭自导深弹全弹由助推器、空投附件和水下弹几部分组成, 作为有效载荷的水下弹又由弹体、弹顶阵自导系统、舷侧阵自导系统、控制系统、引信系统、动力系统以及战斗部等组成。水下弹长度为900 mm, 弹径124 mm, 质量20 kg, 加上助推器, 长度为2 300 mm, 质量小于43 kg。

图1 火箭自导深弹组成示意图
1.2 火箭自导深弹攻潜过程
火箭自导深弹的攻潜过程按照功能可划分为6个阶段, 如图2所示。

图2 火箭自导深弹攻潜过程示意图
阶段1: 火箭自导深弹由水面舰艇发射, 在助推器作用下按照预先设定好的助飞弹道飞行(助飞段弹道)。
阶段2: 助飞弹道结束后, 助推器分离, 空投附件动作, 打开第1个降落伞。
阶段3: 水下弹在降落伞的作用下减速稳定飞行, 以一定速度和姿态入水(弹伞段弹道)。
阶段4: 入水后, 水下弹的速度将被第2个降落伞瞬时降低, 且弹体的纵轴在控制系统作用下, 快速修正到垂直方向(入水段弹道), 开始匀慢速向下运动(准悬停沉降段弹道)。
阶段5: 在准悬停沉降过程中, 舷侧阵自导系统在水平360°范围内搜索目标。为了降低海底和海面的界面混响, 该舷侧阵自导系统的垂直搜索扇面很窄, 因此, 在探测到目标时水下弹所在深度几乎与目标一致。
阶段6: 舷侧阵自导系统探测到目标时, 水下弹的动力系统启动, 同时控制系统操舵使弹体朝目标倾斜转向(倾斜转向弹道), 转为由弹顶阵自导系统搜索目标; 弹顶阵自导系统探测到目标后, 水下弹将依据一定的导引律对目标发起攻击(导引攻击段); 撞上目标后, 触发引信动作引爆聚能战斗部。
需要特别注意的是, 水下弹在准悬停沉降时, 弹顶阵自导系统仅作为回声探测仪使用, 在浅海可以实时获取深弹沉降位置与海底的距离, 并依此判断水下弹是否在目标的正上方, 实现对目标“天顶”的攻击。
2 弹道模型和自导检测模型
根据公开报道的“海矛”火箭自导深弹的参数和攻潜过程, 结合国内相关研究得到的部分参数及一般性的假设, 建立火箭自导深弹的弹道模型和自导检测模型, 各模型中坐标系的含义均与文献[2]中相同。
2.1 弹道模型
总的来说,火箭自导深弹的弹道分为空中和水下两段。其空中段弹道包括助飞段弹道和弹伞段弹道; 水下段弹道包括入水段弹道、准悬停沉降段弹道、倾斜转向段弹道和导引攻击段弹道。
2.1.1 空中段弹道模型
建立地面坐标系表示质心在空间中的位置, 原点为发射位置。为了简化计算, 假设弹体运动过程中无倾斜和侧向运动, 在纵平面内研究其空中段的弹道。
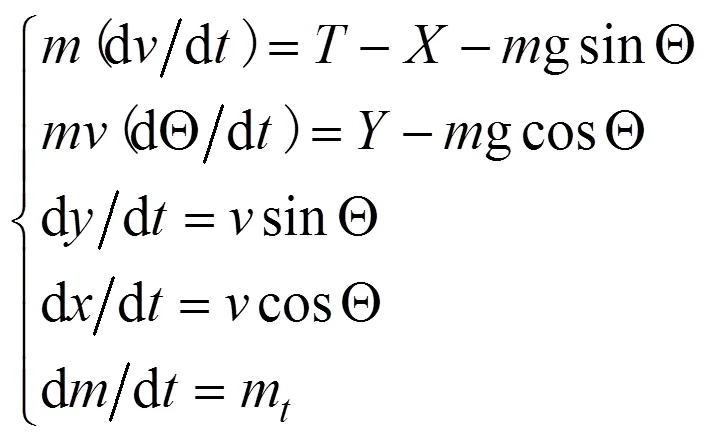
1) 助飞段弹道模型
助飞段弹道从火箭自导深弹发射开始到助推器分离为止。除地面系外, 另建立弹道坐标系, 研究该段质心的运动情况。其助飞弹道方程为[3]

2) 弹伞段弹道模型
弹伞段弹道从助推器分离开始到水下弹入水为止。除地面系和弹道系外, 另建立弹体坐标系研究弹伞系统的位置及姿态, 如图3所示。

图3 弹伞系统示意图
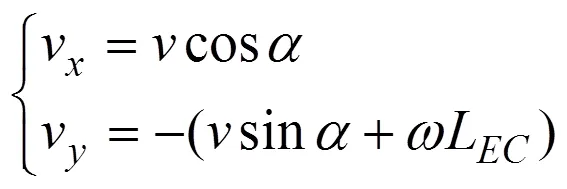


弹伞系统弹道方程为
2.1.2 水下段弹道模型
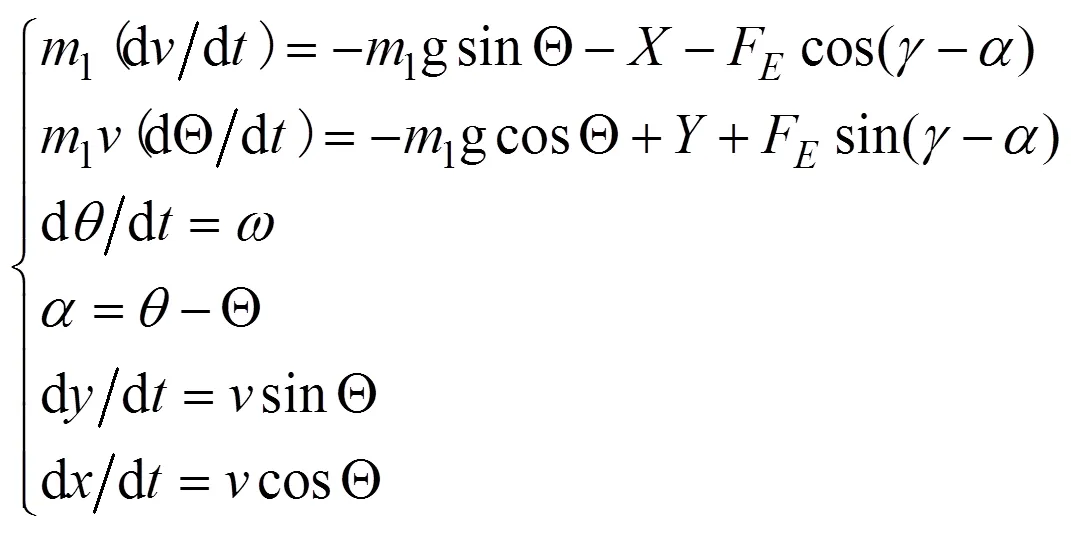
水下段弹道需要考虑水下弹所受到浮力的作用, 首先给出其纵平面内质点动力学方程(地面坐标系)。
入水段、准悬停沉降段、倾斜转向段3个阶段的水下弹道都可用式(6)中的微分方程通过数值方法计算, 只是不同阶段各参数的取值和解微分方程时的初值不同而已。
1) 入水段弹道模型

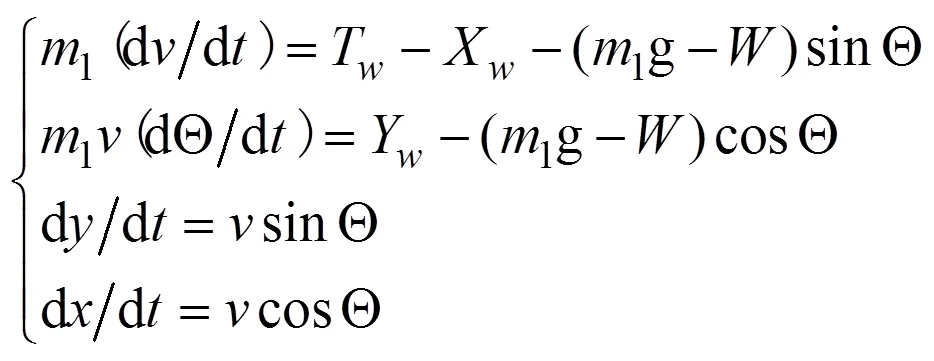
2) 准悬停沉降段弹道模型
准悬停沉降段弹道从水下弹速度降为准悬停沉降速度开始到舷侧阵自导系统探测到目标为止。准悬停沉降段同样是无动力段, 此阶段水下弹所受到的负浮力=阻力, 弹道倾角始终为–90°, 即水下弹以入水段结束时的速度做匀速垂直向下的运动。
3) 倾斜转向段弹道模型
倾斜转向段弹道从舷侧阵自导系统探测到目标开始到弹顶阵自导系统探测到目标为止。在倾斜转向段, 水下弹动力系统启动, 以一定的推力、转弯半径朝目标倾斜转向。将准悬停沉降段结束时的参数作为初值, 求解式(6)的微分方程, 可以得到该段的弹道参数。
4) 导引攻击段弹道模型
导引攻击段弹道从弹顶阵自导系统探测到目标开始到水下弹撞上目标或超过航程自毁为止。文中采用运动学模型和比例导引律研究水下弹的导引攻击段弹道。比例导引律是指武器运动过程中速度矢量的转动角速度与目标线的转动角速度成比例的一种导引方法。
图4为自导深弹与目标在一个纵平面内的相对运动示意图。
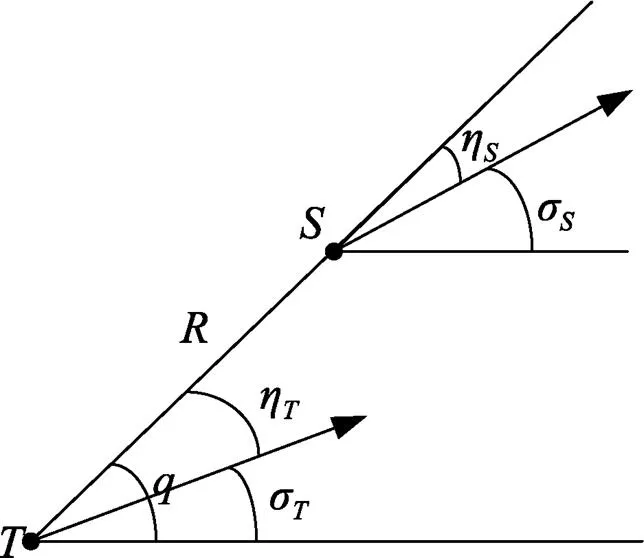
图4 水下弹与目标的相对运动

在一个纵平面内弹目的相对运动方程为

比例导引律方程为

火箭自导深弹导引攻击过程是在3D空间中进行的, 为便于研究, 考虑到水下弹具有良好横滚控制性能的前提下, 弹体的侧向运动与纵向运动可以解耦, 因此可将3D空间运动投影到2个相互垂直的纵平面内, 利用上述模型在这2个平面内分别进行比例导引计算, 然后再合成到3D空间中, 即可得到对应的3D导引攻击弹道。
2.2 自导检测模型
火箭自导深弹同时拥有舷侧阵自导系统和弹顶阵自导系统, 如图5所示。在准悬停沉降过程中水下弹利用舷侧阵自导系统搜索目标, 发现目标后弹体向目标所在方位倾斜转向时, 水下弹转为开始利用弹顶阵自导系统搜索目标。
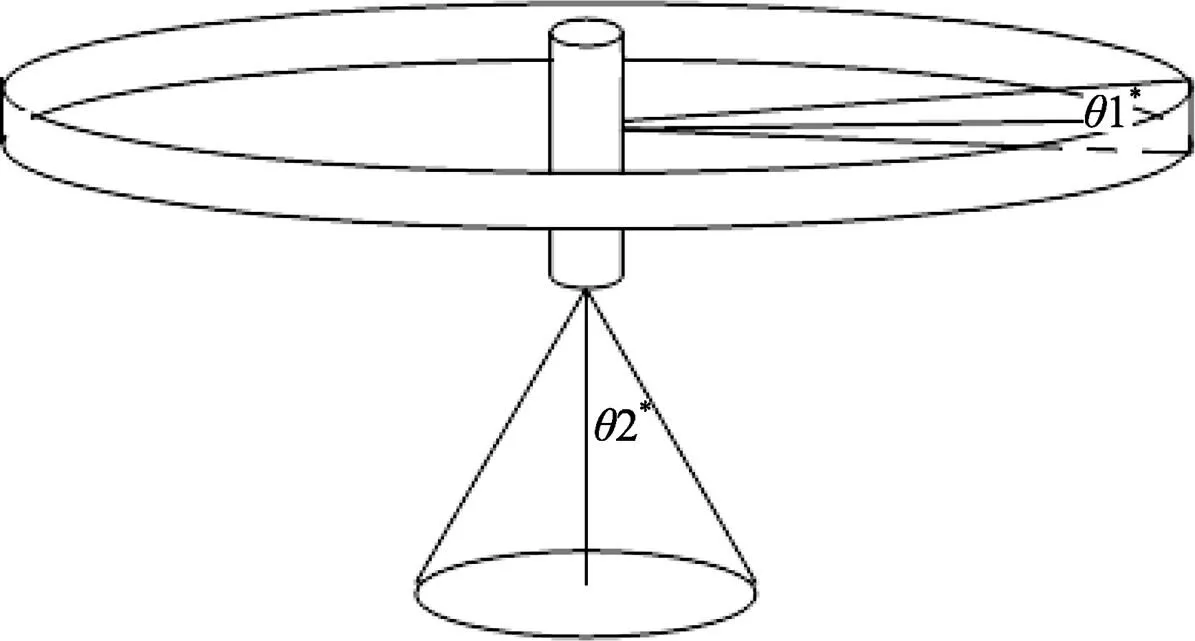
图5 自导系统工作示意图
设1,2分别为舷侧阵和弹顶阵自导系统作用距离,1,2分别为舷侧阵和弹顶阵自导扇面角,为目标潜艇与水下弹距离,1,2分别为目标在舷侧阵和弹顶阵自导系统测量系中的角度, 在准悬停沉降段, 若同时满足约束条件≤1,1≤1, 则认为舷侧阵自导系统探测到目标, 在倾斜转向段, 若同时满足≤2,2≤2, 则认为弹顶阵自导系统探测到目标, 弹顶阵探测到目标后, 自导深弹将按照导引律向目标运动。
3 火箭自导深弹齐射方法
3.1 基本射击方法
对目标提前点射击和对目标当前点射击是火箭自导深弹2种基本射击方法[3]。
1) 对目标提前点射击法
火箭自导深弹发射时刻, 若探测设备此前一直保持对目标的稳定跟踪, 并且火控系统已解算出目标的航向、航速等运动要素, 可以对目标提前点进行射击。
2) 对目标当前点射击法
火箭自导深弹发射时刻, 火控系统未能及时解算或根本无法解算目标运动要素, 我舰仅知道目标潜艇的位置坐标时, 可以对目标当前点进行射击。
3.2 基本射击方法比较与分析
表1从解目标运动要素程度、反应时间和命中概率3个方面对2种基本射击方法进行了比较。

表1 基本射击方法比较
对目标提前点射击虽然命中概率高, 但对火控系统要求也很高, 需要解算目标运动要素并对目标将要到达的位置进行预测, 往往需要几分钟的时间, 有时甚至根本无法解算, 达不到快速反应的要求, 容易贻误战机。
对目标当前点射击的命中概率不及提前点射击高, 但对火控系统要求较低, 且不需要解算目标运动要素并准确预测目标将要到达的位置, 可以大幅缩短反应时间。
火箭自导深弹为近程反潜武器, 具有空中飞行速度快(远远大于潜艇的航速)的特点, 发射后可以在很短的时间内到达瞄准点。为了最大程度地发挥其可快速攻击的优点, 应选择对目标当前点射击的方法实施攻潜, 同时可采取多枚齐射的方式弥补其命中概率低于提前点射击法的不足。
3.3 当前点齐射方法的提出
向目标当前点射击时, 对我方而言, 目标是在火箭自导深弹运动过程中, 以未知的航速和航向驶离当前点的, 形成了一个可能位置区域。因此, 目标的距离越远、深度越大, 其可能位置区域就越大。当目标可能位置区域大到一定程度时, 单枚弹以当前点为瞄准点的射击方法就无法达到较高的作战效能, 传统火箭深弹以固定发射时间间隔(0.2 s), 对同一瞄准点齐射的方法也不适用。因此, 应采取围绕目标当前点向不同瞄准点实施分时点射的齐射方法[4], 以尽量覆盖较大的目标可能位置区域。
3.4 当前点齐射瞄准点的选择
火箭自导深弹齐射是指, 水面舰艇发射2枚或2枚以上火箭自导深弹对同一目标进行射击, 使火箭自导深弹同时或在较短时间间隔内抵达预定落水点(瞄准点)的射击方式[5]。齐射时, 应根据齐射数量、舷侧阵自导系统作用范围, 以当前点水平位置为中心, 合理组织各枚弹的瞄准点(落点)位置。
选择火箭自导深弹齐射瞄准点应遵循以下原则: 首先, 应尽量覆盖较大的目标可能位置区域; 其次, 各枚弹搜索范围之间应有一定的重合部分。
1) 坐标系的选择
2) 2枚当前点齐射瞄准点选择


图6 2枚齐射瞄准点选择示意图
3) 3枚当前点齐射瞄准点选择

图7 3枚齐射瞄准点选择示意图

3.5 齐射各枚弹的发射时间确定
齐射时, 各枚弹射程不同, 飞行时间也将不同。若要满足齐射定义中“同时或在较短时间间隔内抵达预定落水点”的要求, 必须对各枚弹的发射时间做出规定。

4 仿真想定及结果分析
根据所建立的模型及给出的齐射方法, 在典型条件下, 对当前点齐射命中概率进行蒙特卡洛模拟仿真, 并分析仿真结果。火箭自导深弹主要参数设定见表2。

表2 火箭自导深弹主要战术技术参数
4.1 误差取值
基于蒙特卡洛法进行仿真, 各种随机变量的误差取值合适与否是仿真结论可信性的关键。根据一般经验确定计算中涉及的主要误差取值见表3[7]。
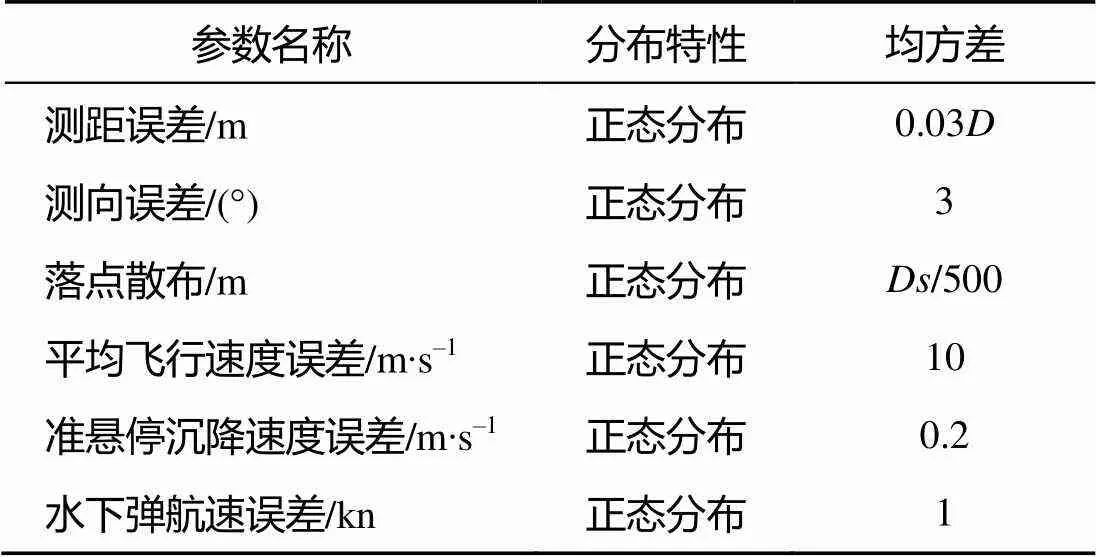
表3 主要误差取值
表中:为目标与我舰的实际距离;为火箭自导深弹空中飞行距离。
4.2 目标初始态势想定及仿真结果分析
目标潜艇航速范围0~20 kn, 航向范围0~360°, 深度范围0~50 m。发射时刻, 目标潜艇的航速、航向以及深度按均匀分布随机产生。为保证结果具有较高的置信度, 仿真次数取2 000, 结果如下。
1) 目标匀速直航时的齐射命中概率
为了体现直观性, 图8给出了对距离6 km的匀速直航目标齐射时, 命中范围俯视图。从图中可以看出, 2枚齐射时存在明显的攻击盲区。
图8 齐射命中目标范围仿真示意图
图9给出了目标实际运动为匀速直航时的命中概率。如图所示, 目标距离小于3 km时, 2枚齐射和3枚齐射的发现概率均在90%以上。随着目标距离的增加, 2枚齐射命中概率迅速减小, 当距离为7 km时, 2枚齐射的命中概率下降到60%, 而3枚齐射在射程允许范围内的命中概率均在90%以上。
2) 目标S状运动时的齐射命中概率
图10给出了目标潜艇为避免我舰解算运动要素而作S状机动时的命中概率。从图中可知, 该情况下3枚齐射命中概率同样在90%以上, 2枚齐射命中概率较高于直航情况。原因是火箭自导深弹飞行和沉降过程中, 目标潜艇驶离当前点所产生的目标可能区域要小于直航情况。
图9 对匀速直航目标齐射命中概率

图10 对S状运动目标齐射命中概率
3) 目标旋回机动时的齐射命中概率


图11给出了目标在火箭自导深弹发射时刻为匀速直线运动, 而后进行旋回机动时的齐射命中概率。

图11 对旋回机动目标齐射命中概率
从图中可以看出, 对于随机机动的潜艇目标, 齐射命中概率也大于直航运动潜艇。
5 结束语
文中建立了“海矛”类火箭自导深弹弹道模型和自导检测模型, 并给出了齐射方法, 以此为基础对不同条件下的当前点齐射命中概率进行了仿真。经研究认为, 在火箭自导深弹射程范围内, 对在深度为50 m浅海水域活动的潜艇, 一次对目标当前点齐射3枚以上可达到90%以上的命中概率。所得到的结论可为进一步研究此类武器的作战使用提供一定的参考。
[1] 傅金祝. 廉价的反潜武器——海矛[J]. 水雷战与舰船防护, 2006(1): 1-5.
[2] 周明, 徐德民. 火箭助飞鱼雷对随机机动目标的射击效率仿真[J]. 火力与指挥控制, 2007, 32(4): 116-118.Zhou Ming, Xu De-min. Study on Fire Efficiency for Attacking Random Maneuvering Target by the Rocket-assisted Torpedo[J]. Fire Control and Command Control, 2007, 32(4): 116-118.
[3] 韩子鹏. 弹箭外弹道学[M]. 北京: 北京理工大学出版社, 2005.
[4] 门金柱, 周明, 郑亚波. 双舰齐射火箭助飞鱼雷协同攻潜研究[J]. 鱼雷技术, 2010, 18(4): 317-320.Men Jin-zhu, Zhou Ming, Zheng Ya-bo. Simulation of Rocket Assisted Torpedo Salvo Attack from a Two-Warship Formation[J]. Torpedo Technology, 2010, 18(4): 317-320.
[5] 门金柱, 周明, 初磊. 编队使用火箭助飞鱼雷齐射问题探讨[J]. 鱼雷技术, 2008, 16(5): 60-62. Men Jin-zhu, Zhou Ming, Chu Lei. Study on Rocket Assisted Torpedo Salvo for Surface Formation[J]. Torpedo Technology, 2008, 16(5): 60-62.
[6] 李文哲, 张宇文, 时进发, 等. 火箭深弹人工散布射击方法[J]. 火力与指挥控制, 2009, 34(4): 85-87.
Li Wen-zhe, Zhang Yu-wen, Shi Jin-fa, et al. Research on Firing Methods of Rocket Depth-charge Artificial Scatter [J]. Fire Control and Command Control, 2009, 34(4): 85-87.
[7] 刑昌风, 李敏勇, 吴玲. 舰载武器系统效能[M]. 北京: 国防工业出版社, 2007.
[8] 孟庆玉, 张静远. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003.
(责任编辑: 许 妍)
Study on Salvo Method of Rocket Homing Depth Charges
ZHAO Dan-huiHE Xin-yiCHEN Zhao-fengZHU Bin
(Naval Academy of Armament, Beijing 100161, China)
Taking Germany Seapike as an example, we establish a virtual trajectory model and a detecting model of a rocket homing depth charge based on the data from public reports and routine hypothesis, offer its salvo method, and compare the simulated hit probabilities of depth charge salvos with different number of depth charges. The results show that in typical conditions, 3 charges salvo could achieve the best cost-efficiency ratio, and higher hit probability of depth charge salvo can be obtained in the case of shorter target distance and larger maneuver.
rocket homing depth charge; multiple salvo; salvo method; best cost-efficiency
TJ65
A
1673-1948(2014)03-0214-07
2013-11-14;
2014-02-16.
国家自然科学基金(60902071).
赵丹辉(1984-), 男, 硕士, 研究方向为武器系统与运用工程.
