3种波束锐化与多目标方位分辨方法
2014-02-27樊书宏
樊书宏
3种波束锐化与多目标方位分辨方法
樊书宏
(中国船舶重工集团公司 第705研究所, 陕西 西安, 710075)
针对鱼雷自导对大尺度多亮点目标精细特征提取与识别、目标精确定向、多目标方位分辨等需要的高空间方位分辨力问题, 分别研究了Hyperbeam波束锐化、多普勒波束锐化和基于线性预测的虚拟阵元扩展波束锐化等方法以及多目标方位分辨性能, 深入分析了各方法理论模型, 仿真研究了波束锐化与多目标方位分辨效果, 并进行了试验验证。研究结果表明, 对于单目标精确定向, Hyperbeam方法有很好的波束锐化效果; 对于多相干目标方位分辨, 后2种方法具有较好的工程应用价值。
鱼雷; 波束锐化; 多目标方位分辨; 线性预测
0 引言
随着水下战场声对抗技术的快速发展, 鱼雷作战环境日益复杂, 从而对鱼雷水声反对抗能力提出了更高的要求。鱼雷通常不仅需要识别目标真假, 而且需要提取大尺度目标多亮点特征和目标具体部位的详细信息, 有效分辨目标不同部位亮点, 并分析各亮点空间分布结构, 实现智能化识别, 这就要求自导系统必须具有很高的多目标空间方位分辨能力。
鱼雷自导或声纳系统通常利用声基阵接收信号形成波束有效获取目标空间方位信息, 波束宽度是影响目标方位估计精度的重要因素。一般地, 对于位于不同方向波束的目标, 可以根据波束方向确定目标方位, 但对于位于同一波束内的不同目标, 很难进行有效区分和精确定向。因此, 自导系统对空间多个目标或目标多个亮点的有效分辨与方位估计性能很大程度上取决于声基阵波束的尖锐程度。然而, 鱼雷物理尺寸有限, 波束特性极大受制于声基阵物理孔径和工作频率的影响, 这种情况下, 对自导声基阵波束进行锐化处理, 对提高鱼雷自导空间方位分辨能力、实现目标精确定向以及多目标分辨和识别等具有重要意义。
本文针对鱼雷自导波束锐化与多目标空间方位分辨问题, 分别研究了Hyperbeam波束锐化和多普勒波束锐化方法, 并比较了基于线性预测(linear prediction, LP)的波束锐化方法。文章同时分析了各方法的理论模型, 并通过计算机仿真和水池试验比较分析了不同方法波束锐化与多目标分辨性能。研究结果表明, 3种方法均可有效实现优化波束和提高波束的目标定向能力, 对于多目标分辨, 除Hyperbeam方法具有较大局限性外, 其他2种方法均可有效实现。。
1 理论模型及分析
1.1 Hyperbeam波束锐化方法
对声基阵输出信号(), 通过波束形成加权和, 形成相同轴向并具有不同声学中心的分裂波束, 波束输出为
则定义Hyperbeam波束表达式为[1-3]

为了更符合期望的波束指向性图, 定义广义Hyperbeam为



(6)


由式(8)可见, 当波束方向越接近目标方向时, 加权因子越接近于2, 随着波束方向远离目标所在方向, 子波束的加权因子越小, 直至接近于0。
可见, Hyperbeam方法本质上是通过对半阵形成子波束的输出信号按照不同波束方向自动选取不同加权因子来实现波束锐化的, 波束方向越靠近目标方向则加权因子越大, 波束方向越远离目标方向则加权因子越小, 子波束本身并不具备很高的方位分辨力, 因此, 对于单目标情况, 该方法有较明显的效果, 但对于多目标情况, 该方法具有局限性。
1.2 多普勒波束锐化方法
由于鱼雷与目标之间存在相对运动, 同时, 鱼雷运动方向与不同方位目标视线之间的夹角不同, 因此鱼雷运动对于不同目标的相对径向速度分量有差异, 也就是说, 同一波束内不同目标或不同部位声反射亮点会产生不同的相对径向速度和多普勒频移。多普勒波束锐化方法利用鱼雷与目标的相对运动, 通过分辨不同方位目标或目标亮点之间的多普勒差异来提高鱼雷自导目标方位分辨率。

图1 鱼雷攻击目标态势示意图
由图1可见, 目标体上该亮点多普勒频移为
1.3 基于线性预测虚拟阵元的波束锐化方法
LP是一种根据已知时间序列估计将来或过去数据的自回归(auto-ergressive, AR)模型参数估计方法, 包括前向预测和后向预测。根据预测滤波器和预测误差滤波器的误差不断调节预测滤波器的权值, 实现对未知数据的预测和估计。

由此可见, 空间中等间隔的各个阵元可以对应于线性预测滤波器中的各个延迟节点, 各节点间的延迟对应于空域中两相邻阵元的间距。这样, 在阵列波束形成的空域信号处理中可以应用时域的线性预测理论, 预测和估计阵列两边相同间距的虚拟阵元接收数据, 对线列阵进行虚拟阵元的基阵孔径扩展, 利用孔径扩展后的基阵可实现波束锐化[4]。


根据实际阵列各阵元在各采样快拍时刻数据序列分别计算前向和后向预测系数, 可对实际阵列左、右虚拟阵元数据进行预测和估计。重复该预测过程可实现左右多阵元的虚拟扩展, 从而一定程度上虚拟扩展阵列孔径, 实现波束锐化。
2 计算机仿真
2.1 Hyperbeam波束锐化方法仿真


图2 单目标情况下Hyperbeam波束锐化仿真结果
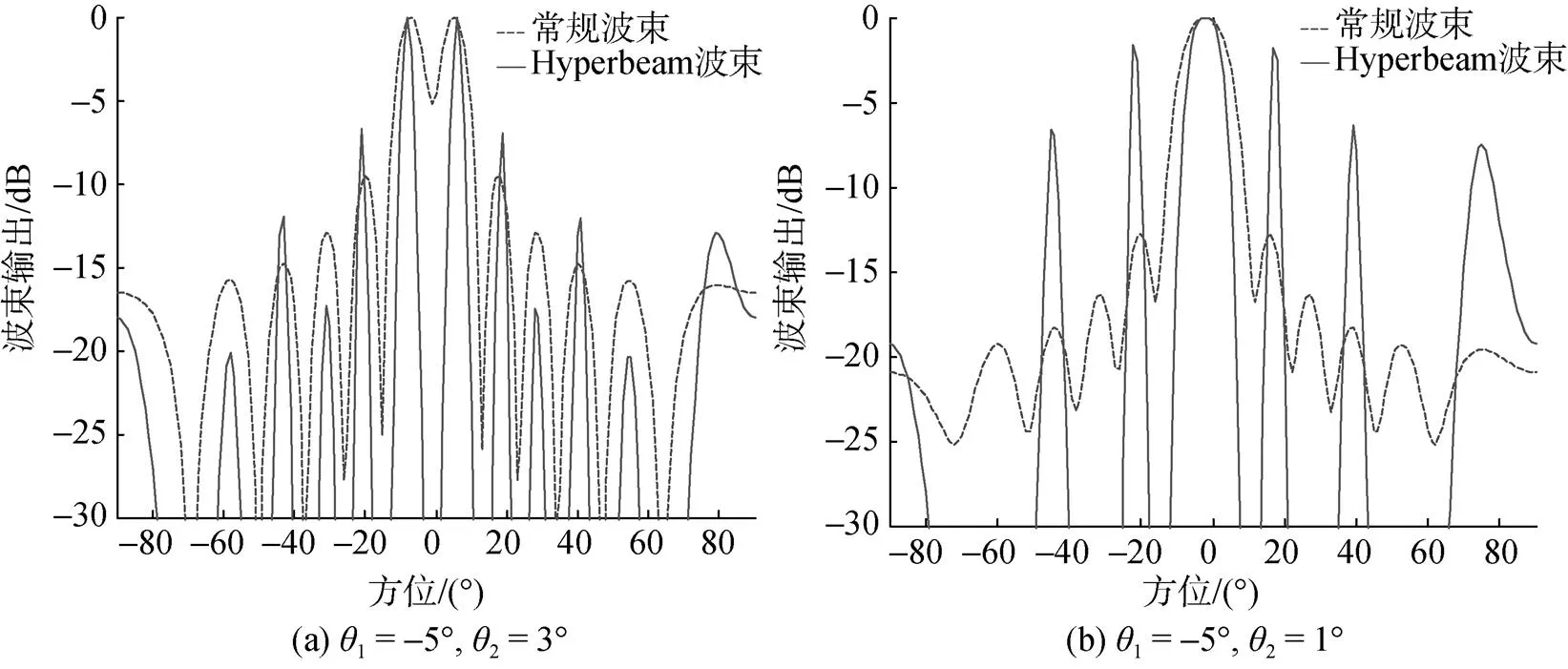
图3 双目标情况下波束锐化仿真结果
由图3可见, 存在2个目标情况下, Hyperbeam波束锐化方法难以实现尖锐波束, 与常规波束相比, 其目标分辨效果不明显, 分辨能力与常规波束相当。
仿真结果表明, Hyperbeam方法在取适当值时对单目标检测有较好波束锐化能力, 但对于多目标, 其分辨能力有限, 仿真与理论分析结果一致。
2.2 多普勒波束锐化方法分析与仿真
假设鱼雷自导采用均匀平面阵, 水平方向可等效为12阵元均匀间距0.03 m的线列阵。
针对图1所示鱼雷与目标的攻击态势, 假设鱼雷航行速度50 kn, 同一深度平面内鱼雷–10°方向距离300 m处有一目标, 目标速度10 kn, 目标长度60 m, 目标体上均匀分布5个等强度声反射亮点。鱼雷–10°波束主轴所在的鱼雷视线方向与目标呈60°舷角, 鱼雷发射信号的中心频率20 kHz。
由雷目相对态势计算可得, 5个亮点相对于鱼雷的水平方位分别为–14.7°, –12.4°, –10°, –7.5°, –4.8°, 各亮点对应多普勒频率分别为584.8 Hz, 595.8 Hz, 606.4 Hz, 616.3 Hz, 625.5 Hz。所有亮点对鱼雷最大张角度为9.9°, 该张角与–10°波束–3 dB宽度相当。以鱼雷位置为坐标原点, 各亮点相对空间位置及其与自导波束的关系如图4所示。可见, 全部亮点位于同一波束中, 通过波束难以分辨。
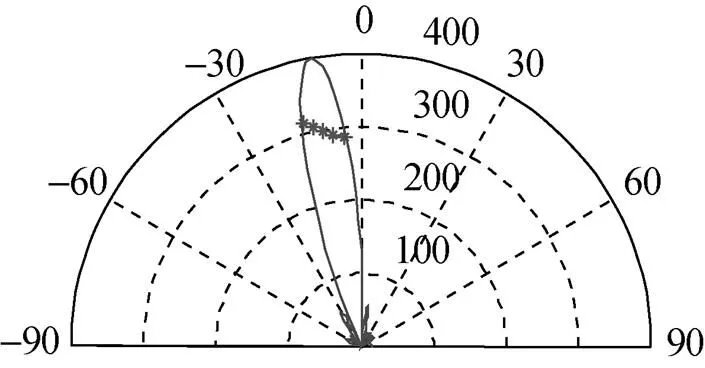
图4 目标与波束示意图
对目标回波信号进行频域多普勒分析, 可得到目标回波频域特征如图5所示。可见, 目标回波频率中出现了5个峰值, 分别对应5个声反射亮点。根据该多普勒频率分析结果, 进一步进行目标方位估计。通过有效回波信号检测, 并对波束覆盖范围进行网格划分, 以及对每一网格对应多普勒频率的分析计算, 形成多普勒频率细化分析单元。在此基础上, 分析回波各有效频点对应的方位分辨单元。最后, 对同一方位分辨单元进行模糊聚类分析, 即可得到所有目标亮点的方位估计, 有效实现多目标方位分辨。各目标亮点的方位分辨和估计结果如图6所示。图中为显示方便, 假设各亮点距离相同。

图5 目标回波频域分析结果
由图6可见, 图中清楚显示了波束内各目标亮点的分辨和估计结果, 有效实现了同一波束内目标不同亮点的方位分辨, 其分辨估计结果与图4所示的仿真态势一致。

图6 亮点方位估计分辨结果
图7显示了各目标亮点方位分辨估计结果与其实际方位分布的比较结果。可见, 各亮点方位估计有一定误差, 但误差不大, 有效实现了多目标分辨。因此, 鱼雷根据自导接收波束信号可以采用多普勒波束锐化方法自动完成波束内多目标分辨与方位估计, 可满足工程应用需要。
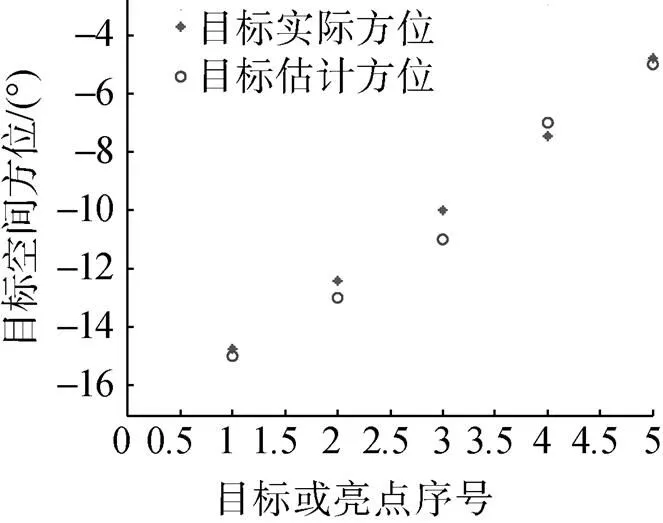
图7 估计结果与实际方位比较
2.3 LP虚拟阵元的波束锐化方法仿真
声基阵仍然采用间距0.03 m的12元均匀线列阵模型, 工作频率20kHz, 分别针对2种理想情况进行方法可行性的原理验证性仿真: 1)只有1个目标, 位于–20°方向; 2)同时存在2个目标, 分别位于–20°和–12°方向,2个目标信号频率相同, 为相干目标。基阵分别采用常规波束形成方法和基于LP虚拟阵元扩展的波束锐化方法, 在2种情况下同时形成各方向波束进行波束扫描, 扫描结果分别如图8和图9所示。
由图8和图9所示的仿真结果可见, 与常规波束形成方法相比, 基于LP虚拟阵元的波束锐化方法具有较好的波束锐化效果。在单目标情况下, 可大大减小波束宽度, 降低旁瓣, 有利于目标检测; 在–20°和–12°方向同时存在2个相干目标的情况下, 常规波束已无法分辨, 而LP虚拟阵元的波束锐化方法可以有效分辨2个目标, 较准确地给出各目标实际方位。因此, 该方法在原理上是可行的, 可用于波束锐化和相干目标分辨。
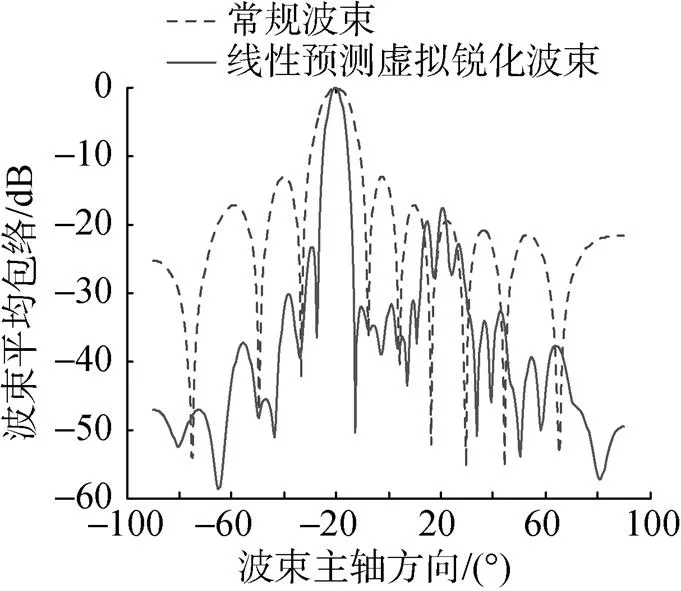
图8 单目标波束扫描结果
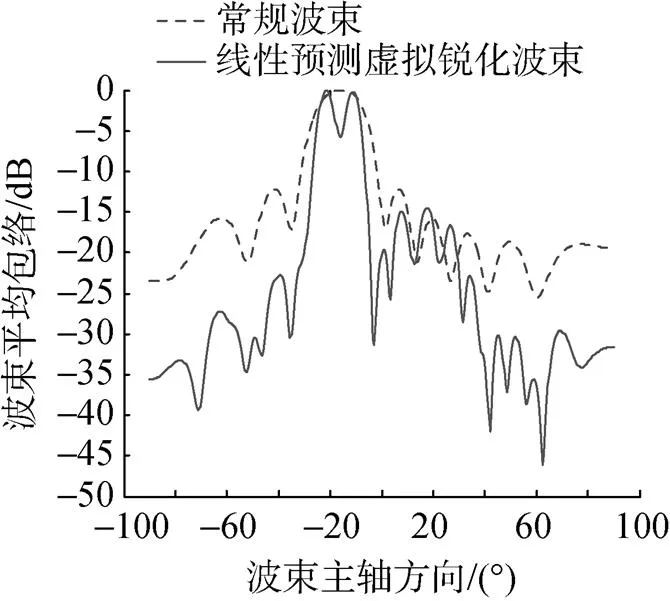
图9 两相干目标分辨结果
进一步仿真表明, 在高信噪比的理想条件下, 该方法随着扩展阵元数的增多, 可以不断提高不同方位目标分辨能力, 但在实际信噪比有限的条件下, 由于噪声影响, 阵元扩展至一定数量后, 波束锐化和目标方位分辨能力随虚拟阵元数量变化不明显。
2.4 不同方法对相干目标分辨性能的仿真比较
假设鱼雷速度50 kn, 发射信号频率25 kHz, 自导平面阵水平方向可等效为间距0.03 m的12元均匀线列阵模型, 水平面内–3°和–9°方向同时存在2个等强度的静止目标, 分别采用本文3种波束锐化方法进行仿真, 验证目标分辨性能。
图10同时显示了声基阵分别采用常规波束、Hyperbeam波束和LP虚拟阵元波束进行全扇面扫描的仿真结果, 图11给出了多普勒波束锐化检测仿真结果。
由图10和图11可见, 对于–3°和–9°方向的两相干目标, 常规波束无法分辨, Hyperbeam方法也无法有效分辨, 而LP虚拟阵元方法经过多次虚拟阵元扩展可以有效分辨, 多普勒波束锐化方法经过频率精估和检测聚类处理, 也能正确分辨并估计出了2个目标的空间方位。

图10 3种波束锐化方法对等强度双目标扫描结果比较

图11 多普勒波束对等强度双目标分辨结果
因此, 理想条件下的仿真结果表明, 对于单目标情况, 3种方法均可有效实现基阵波束锐化, 但在同时存在相干多目标情况下, 与常规波束相比, Hyperbeam的目标分辨能力优势不明显, 多普勒和LP虚拟阵元方法均具有明显目标分辨效果。
3 试验验证
为了进一步验证仿真结论, 在消声水池进行了相干目标分辨试验。研制了试验样阵, 孔径为360 mm, 阵元均匀间距30 mm, 位于水下3 m。2个发射换能器与样阵处于水下同一深度, 位于样阵前方4.78 m, 两换能器相距0.8 m, 可分别发射设定频率连续波。
试验时, 首先分别使2个信源逐一发射, 并使信源1比信源2发射信号强, 样阵接收信号并进行波束扫描处理, 试验结果如图12所示。
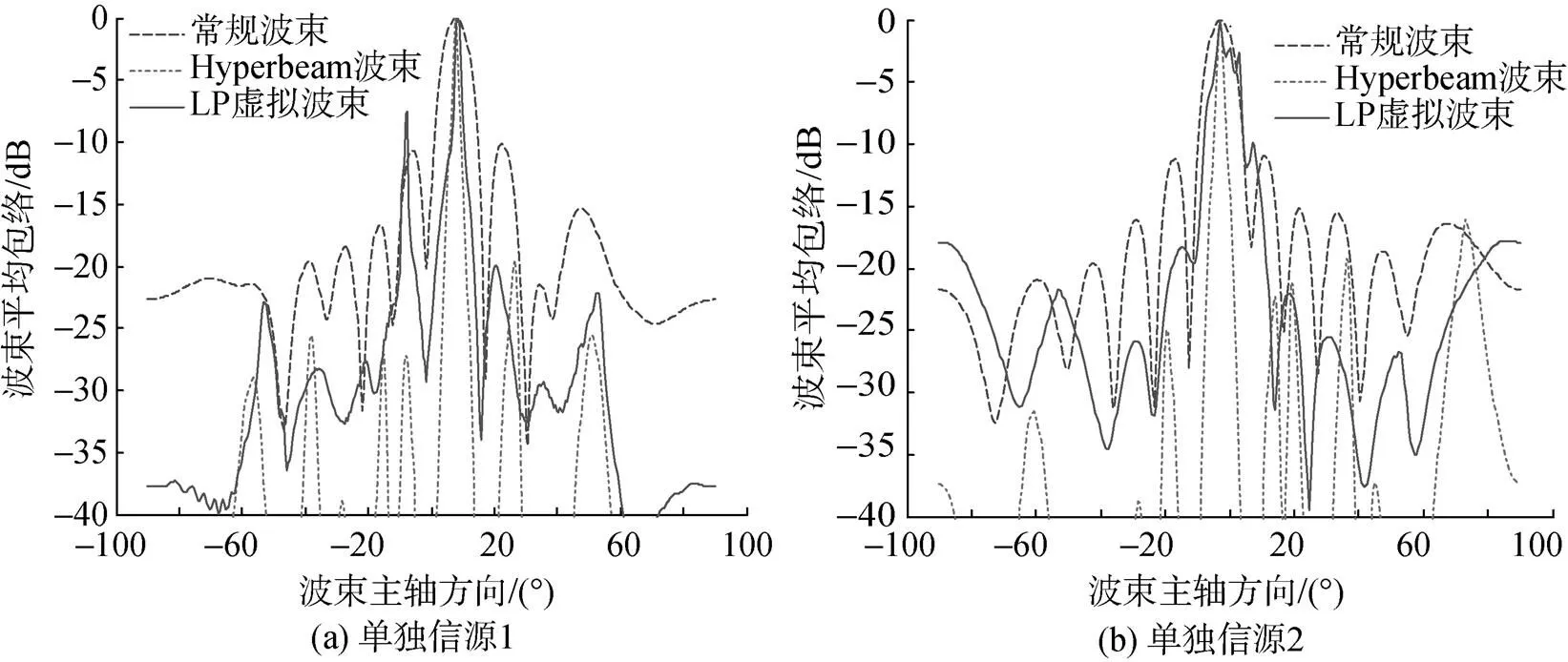
图12 单信源情况下的试验结果
由图12可见, 单目标情况下, Hyperbeam波束方法和LP虚拟阵元方法均表现出了波束锐化效果, 但Hyperbeam波束方法相对性能更优, 其旁瓣更低, 抗噪声干扰能力更强。LP虚拟阵元方法由于噪声影响, 效果远不及仿真结果, 旁瓣较高, 而且在信源2发射强度减小、信噪比降低的情况下, 波束锐化效果受到明显影响。同时可见, 两信源方位分别约为8°和–3°。
在此基础上, 两信源同时发射25 kHz信号, 信源1发射强度大于信源2, 样阵接收信号并进行目标分辨处理, 试验结果如图13所示。分别调整两信源发射频率, 模拟8°和–3°方向目标回波的不同多普勒频率, 样阵接收信号并进行多普勒波束锐化和目标分辨处理, 试验结果如图14所示。
由图13和图14试验结果可见, 同时存在8°和–3°两个不等强度相干目标情况下, Hyperbeam方法完全失去了目标分辨能力, LP虚拟阵元方法还表现出了一定的目标分辨能力, 但由于噪声影响, 其性能受到较大影响和局限。多普勒方法基于目标多普勒频率的差异, 性能相对比较稳健, 准确实现了两目标方位估计和分辨。
4 结束语
针对鱼雷自导波束锐化和对不同方位多个相干目标信源的分辨问题, 分别研究了Hyperbeam、多普勒和基于LP虚拟阵元扩展的波束锐化方法。分别进行了理论分析和计算机仿真, 并进行了水池试验验证。
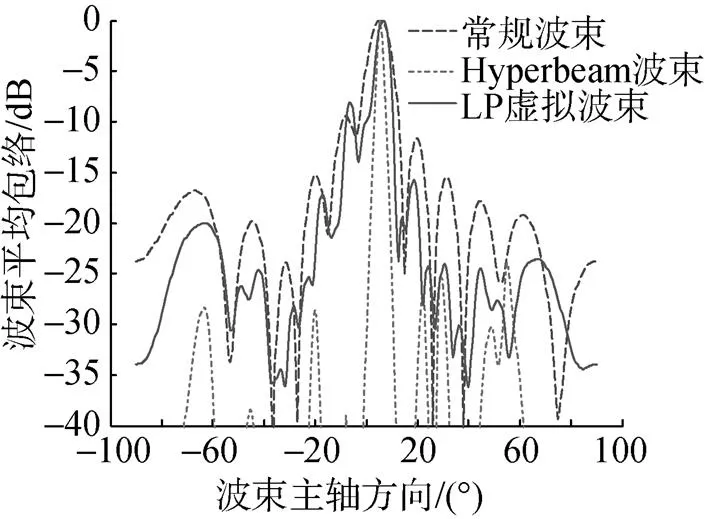
图13 3种波束锐化方法对不同强度双目标扫描结果比较
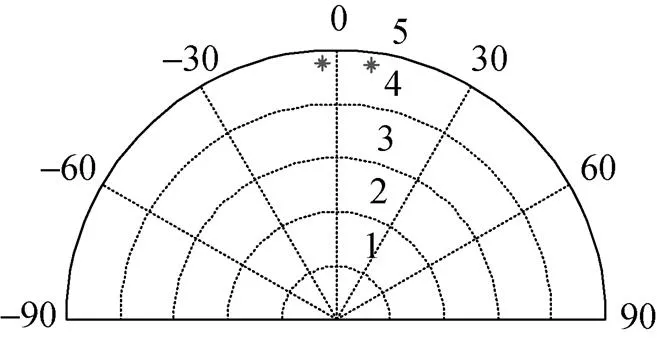
图14 多普勒波束对不同强度双目标分辨结果
研究结果表明, Hyperbeam方法在单目标信源情况下, 具有很好的波束锐化能力, 但在多目标分辨方面比常规波束并不具明显优势。多普勒波束锐化方法利用不同方位目标的相对多普勒差异实现较高的目标方位分辨, 对于大尺度多亮点目标是一种比较有效的波束锐化和目标分辨方法, 具有较强的稳健性。基于LP虚拟阵元扩展的波束锐化方法具有一定的波束锐化和多目标分辨能力, 但受噪声干扰的影响较大, 实际应用中有局限性, 适用于高信噪比条件下的多目标分辨。对于鱼雷自导多目标分辨和目标精细特征提取识别的实际工程应用, 基于多波束的多普勒波束锐化方法和基于LP虚拟阵元扩展的波束锐化方法具有相对更强的工程实用性。
[1] Heiko S, Holger E. Method for the Formation of Radiated Beams in Direction Finder Systems: US Patent, 6021096 [P], 2000-02-01. http://www.Freepatentson-line.com/602 1096. html.
[2] 聂良春. 超波束(HBF)用于波束锐化[J]. 声学技术, 2008, 27(6): 892-895.
Nie Liang-chun. Hyper Beamforming(HBF) Technique for Beam Narrowing[J]. Technical Acoustics, 2008, 27(6): 892-895.
[3] 杨云川, 张奎. HyperBeam分析及被动检测应用[C]// 2008鱼雷自导引信技术研讨会论文集, 2008.
[4] 胡鹏. 虚拟阵元波束形成方法研究[D]. 西安: 西北工业大学, 2006.
[5] 胡广书. 数字信号处理理论、算法与实现[M]. 第2版. 北京: 清华大学出版社, 2003.
(责任编辑: 杨力军)
Three Methods for Beam Sharpening and Multi-Target Azimuth Discrimination
FAN Shu-hong
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
To enhance azimuth discrimination of torpedo homing system for large-scale multi-highlight target detailed feature extraction and recognition, accurate orientation, and multi-target azimuth discrimination, etc., three methods are presented for sharpening Hyperbeam, Doppler beam, and linear prediction based virtual elements extended array beam. And their performances of multi-target azimuth discrimination are analyzed. The theoretical models of the beam sharpening methods are discussed in detail, and are verified by simulations. Experiments show that the Hyperbeam sharpening method is effective in the case of single target but not available for multi-target conditions, while the other two methods are more applicable for azimuth discrimination of multi coherent targets.
torpedo; beam sharpening; multi-target azimuth discrimination; linear prediction
2013-08-27;
2014-03-18.
国防基础科研项目(B0820110040).
樊书宏(1975-), 男,博士, 主要研究方向为水声信号处理及水下目标识别等.
TJ630.34
A
1673-1948(2014)04-0254-08