水声对抗环境下自导鱼雷自适应导引方法
2014-02-27陈克喆程咏梅刘建新
陈克喆, 程咏梅, 禹 亮, 刘建新
水声对抗环境下自导鱼雷自适应导引方法
陈克喆, 程咏梅, 禹 亮, 刘建新
(西北工业大学 自动化学院, 陕西 西安, 710129)
随着现代水声对抗与反对抗环境的日益复杂, 自导鱼雷导引律的设计需要考虑目标识别及末自导垂直命中的要求, 使得传统的导引律面临新的挑战, 为此提出了一种新的自导鱼雷自适应导引方法, 该方法根据鱼雷与目标之间的距离调整鱼雷航向角, 调整过程考虑了进行方位走向目标识别以及末自导垂直命中对导引弹道的要求, 使目标舷角有利于进行目标识别及末自导垂直命中。仿真结果表明, 采用该方法获得的目标舷角变化不仅满足目标识别要求, 而且有利于垂直命中。
鱼雷; 自适应导引方法; 方位走向; 目标识别; 垂直命中
0 引言
自导鱼雷通过安装在鱼雷头部的自导系统来感知被攻击目标相对于鱼雷的方位、距离、距离变化率等运动参量, 这些参量用于形成导引律, 将鱼雷向目标导引[1], 鱼雷根据导引律追踪目标形成的运动轨迹称为导引弹道。传统自导鱼雷导引方法根据目标相对于鱼雷的方位, 使用追踪法和固定提前角法作为导引律, 它们结构简单, 易于实现。随着现代水声对抗与反对抗环境的日益复杂[2-4], 声诱饵的释放会干扰鱼雷, 因此鱼雷需要结合目标的属性信息进行目标识别, 而目标属性信息获取的准确度受鱼雷与目标之间的相对位置关系影响。追踪法、固定提前角法没有考虑如何准确获得目标的属性信息, 其导引弹道不利于目标识别。本文分析了自导鱼雷进行目标识别以及末自导垂直命中对导引弹道的要求, 依据潜艇的方位走向特征以及垂直命中要求, 随着鱼雷与目标距离的减小, 采用自适应调整鱼雷航向角的思路, 提出一种新的随距离自适应调整航向角的导引律方法。
1 对抗环境下自导鱼雷导引律
在讨论导引弹道时, 把鱼雷和目标都视为质点, 并且认为导引系统是理想的, 即把鱼雷的运动看作是服从某些约束关系的质点运动。同时还认为鱼雷和目标始终在同一平面内, 这个平面称为攻击平面, 则鱼雷和目标之间的相对运动关系如图1所示。
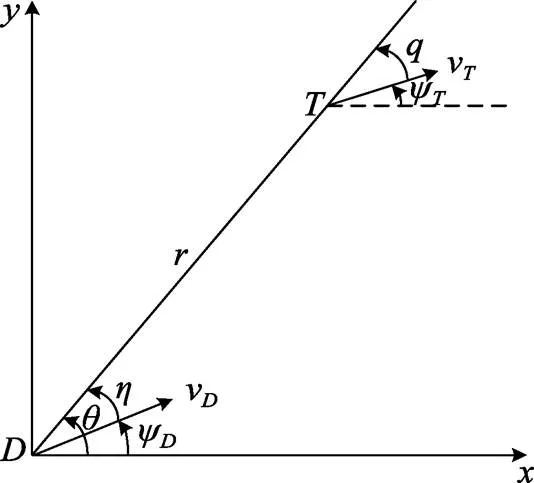
图1 鱼雷和目标的相对运动关系
其方程描述如下

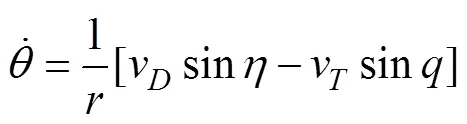

由于鱼雷的数据率较低, 如果以鱼雷航向角速度作为弹道输入, 当连续几拍丢失目标回波时, 设定的航向角速度反而会导引鱼雷越来越偏离目标, 因此, 以鱼雷航向角作为弹道输入, 即使某一时刻未能探测到目标, 鱼雷也能按照大体正确的方向运动, 从而再次探测到目标[5]。即


1.1 目标识别能力
在水声对抗与反对抗过程中, 潜艇会释放诱饵提高自己的生存概率, 因此鱼雷面临目标识别的问题。鱼雷主动声自导系统主要依据其所接收的目标回波的时间域、空间域和频率域特性进行目标识别[6]。
从空间角度看, 潜艇回波是由空间上不同方位而来的子反射回波构成, 其时间-方位呈现出一定的分布规律, 而不是一个恒定的方位值。潜艇回波的方位走向如图2所示[7], 将自导声纳在一个回波周期内接收到的目标回波信号按时间次序分为许多帧, 每一帧都测得目标的方位, 所有帧的目标方位基本呈线性变化关系, 这就是所谓的“方位走向”。

图2 潜艇方位走向示意图

由以上分析可知, 方位走向是尺度目标识别所依据的主要特征, 而在目标的艏、艉方向, 方位走向变化不大, 不利于尺度目标识别, 在目标的正横方向, 方位走向变化最大, 最有利于尺度目标识别, 这就对鱼雷的导引弹道提出了要求,从目标正横方向而不是艏、艉方向接近目标。
图3 潜艇方位走向变化量随舷角变化
1.2 垂直命中

2 基于距离变化的自适应导引律设计

把式(2)代入式(8)


表1 目标方位角的取值

图4 目标方位角随距离的变化曲线
3 仿真结果与分析
3.1 稳健性分析

3.2 仿真


图5 鱼雷初始位置为(0,0), 初始航向为45°时跟踪弹道示意图

图6 鱼雷初始位置为(0,0), 初始航向为45°时目标舷角变化曲线
当鱼雷初始位置(0, 1800), 速度20 m/s, 初始航向0°, 其他设置同上, 对追踪法、固定提前角法及本文方法进行仿真, 跟踪弹道如图7所示, 目标舷角的变化曲线如图8所示。


图7 鱼雷初始位置为(0, 1800), 初始航向为0°时跟踪弹道示意图
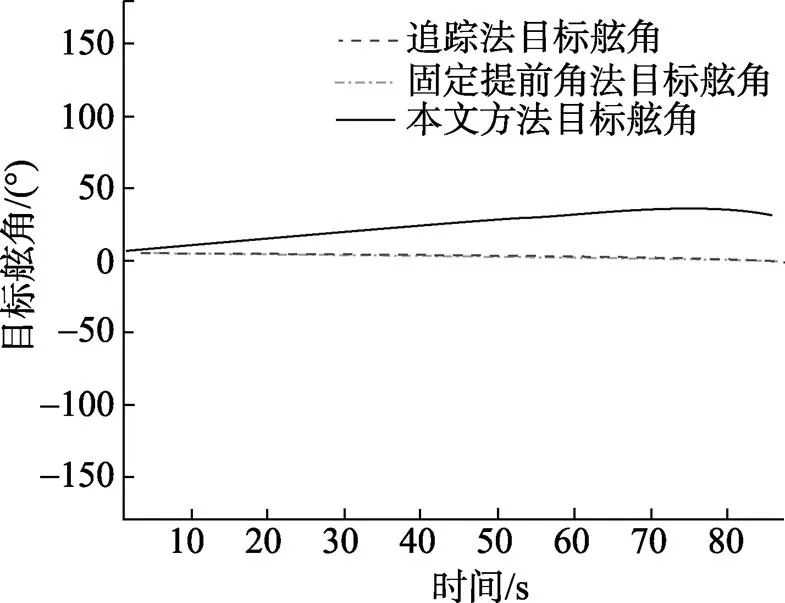
图8 鱼雷初始位置为(0, 1 800), 初始航向为0°时目标舷角变化曲线

图9 鱼雷初始位置为(0, 4000),初始航向为45°时跟踪弹道示意图
图5、图7和图9中的鱼雷与目标轨迹没有交汇是因为仿真没有末自导弹道, 当鱼雷按给定导引律接近目标到一定距离后, 进入末自导弹道。从图6、图8和图10中可看出, 追踪法、固定提前角法导引弹道的目标舷角是逐渐减小的, 且追踪法比固定提前角法目标舷角减小的快, 尤其是当鱼雷初始航向与目标初始航向一致时(图8仿真情况), 追踪法、固定提前角法的目标舷角一直很小, 因此这2种方法不利于目标识别。本文方法的目标舷角随着鱼雷与目标由远及近进行自适应调整, 可满足目标识别的要求, 且其终端目标舷角比追踪法、固定提前角法都大, 更有利于末自导的垂直命中。

图10 鱼雷初始位置为(0, 4000), 初始航向为45°时目标舷角变化曲线
4 结束语
本文利用鱼雷与目标之间的距离变化, 同时综合考虑水下对抗与反对抗环境下的目标识别、末自导的垂直命中2个性能要求, 提出了基于距离变化的自导鱼雷自适应导引方法, 在3种不同潜艇相对鱼雷方位(左前、右前、正前)的情况下, 对追踪法、固定提前角法及本文方法进行导引弹道仿真与分析。结果表明, 采用本文方法目标舷角的变化不仅满足目标识别的要求, 且有利于垂直命中, 可为工程应用提供借鉴。
[1] 张宇文. 鱼雷弹道与弹道设计[M]. 西安: 西北工业大学出版社, 1999.
[2] 王桂芹, 刘海光, 贾瑞凤. 声制导鱼雷反水声对抗技术综述[J]. 舰船电子工程, 2009, 29(3): 150-153.
Wang Gui-qin, Liu Hai-guang, Jia Rui-feng. Overview of Anti-countermeasure Technology of Acoustic Homing Torpedo[J]. Ship Electronic Engineering, 2009, 29(3): 150-153.
[3] Zeng Y Y, Kang F J, Yang H Z. Intelligent Optimization of an Anti-torpedo Counterplan Based on Particle Swarm Optimization Algorithm[C]//Asia Simulation Conference. Shanghai, 2012: 358-364.
[4] Chen Y C, Wang H K, Zhao Y. Optimal Trajectory for Swim-out Acoustic Decoy to Countermeasure Torpedo [C]//4th International Workshop on Advanced Computational Intelligence. Wuhan, 2011: 86-91.
[5] 刘宇, 原建平, 侯朝焕. 水下自导武器导引律研究[J]. 兵工学报, 2008, 28(4): 483-486.
Liu Yu, Yuan Jian-ping, Hou Chao-huan. Research on the Guidance Law of Underwater Autoguide Weapon[J]. Acta Armamentarii, 2008, 28(4): 483-486.
[6] 陈春玉, 张静远, 王明洲, 等. 反鱼雷技术[M]. 北京: 国防工业出版社, 2006: 118-124.
[7] 石勇, 石敏, 蒋兴舟, 等. 基于方位走向识别目标尺度的仿真与特性分析[J]. 鱼雷技术, 2003, 11(1): 27-30.
(责任编辑: 杨力军)
Adaptive Guidance Method of Homing Torpedo under Underwater Acoustic Countermeasure Condition
CHEN Ke-zheCHENG Yong-meiYU LiangLIU Jian-xin
(School of Automation, Northwestern Polytechnical University, Xi′an 710129, China)
Modern acoustic countermeasure and counter-countermeasure environments become more and more complex, so it is necessary to consider target recognition and terminal guidance perpendicular hit in the design of guidance law for a homing torpedo. This paper proposes a new adaptive guidance method for a homing torpedo, in which the torpedo course angle is adjusted according to the distance between a torpedo and a target, and the target azimuth trend recognition and the requirement of guidance trajectory for terminal guidance perpendicular hit are taken into account, so that the target′s relative bearing angle can facilitate the recognition and the hit. Simulation results show that the variation of target′s relative bearing angle obtained by the proposed method facilitates both the target recognition and the perpendicular target hit.
torpedo; adaptive guidance method; azimuth trend; target recognition; perpendicular hit
2013-11-15;
2014-02-28.
西安市科技计划项目(CXY1350-2)
陈克喆(1989-), 男, 在读硕士, 研究方向为水下多目标跟踪与制导系统仿真.
TJ630.34
A
1673-1948(2014)04-0262-05