中低分辨率遥感影像控制点对自动提取方法
2014-02-23唐小英
夏 英,唐小英
(重庆邮电大学空间信息系统研究所,重庆 400065)
0 引言
遥感图像配准是指对来自不同时间、不同传感器或者不同视角的2幅或者多幅图像进行匹配的过程,它是图像处理领域的一个关键步骤,在空间信息处理领域具有广泛的应用。与高分辨率遥感影像相比,中低分辨率遥感影像具有累积时间长、数据量大、分辨率低等特点,在土地监测、山区植被调查等领域得到广泛应用。这些应用都涉及了自动配准技术,因此,对中低分辨率遥感影像自动配准技术的研究具有重要意义。
图像配准大致分为两类[1],即基于区域灰度的配准方法与基于图像特征的配准方法。基于区域灰度的配准具有简单、易懂等优点,但计算量大并且对图像的光照、旋转和尺度的变化敏感;基于图像特征的配准是最常用的图像配准方法,它把图像间的关系转换为图像间的特征点、线或者面的关系,大大减少了计算量,对图像的遮挡和畸变等也具有一定的鲁棒性。
本文基于图像特征的配准方法,重点分析中低分辨率遥感影像特征点的提取、描述和匹配过程。基于图像特征的图像配准一般包含特征检测、特征匹配、变换模型参数估计、图像的重采样和插值等4个步骤。该方法大多采用诸如Moravec算子、Harris算子、Forstner算子、Canny算子、SUSAN算子、SIFT算法等提取图像特征。其中,SIFT算法对图像几何变形、光照变化、分辨率差异、模糊、旋转和图像压缩等情况都表现出良好的性能[2-3]。李晓明等[4]将SIFT算法引入了遥感影像配准领域,并利用RANSAC算法剔除匹配错误的特征点对。刘毅[5]通过一致性随机采样算法剔除错误的匹配,从而提高图像配准的精度。倪希亮等[6]提出了一种均匀化的SIFT影像配准改进算法,对大数量影像进行均匀分块以及局部搜索同名点的方法使得2幅影像的匹配点能够均匀分布,明显提高了影像配准的速度。韩舸等[7]把SIFT算法和静态小波变换结合起来,形成了一种有效的遥感影像配准控制点自动提取方法。
SIFT算法能够在较小范围的图像中提取到大量的特征点,这些特征点具有尺度、旋转不变性。但由于不同传感器导致光照程度、分辨率的不一致等原因,对于中低分辨率遥感影像,SIFT算法难以确定相关参数值,只能提取到少量的特征点且分布不均匀。而Harris[8]能提取出覆盖全图的大量的角点,但这些角点对旋转、尺度变化敏感。为充分利用SIFT和Harris的优势,本文针对中低分辨率遥感影像配准问题,提出 HSIFT(Harris&scale invariant feature transformation)方法,目的是在参考影像与待配准影像之间寻找精度高且分布均匀的控制点对。
1 HSIFT方法的基本思想
为能提取出精度高且均匀分布的中低分辨率遥感参考影像和待配准影像的控制点对,HSIFT方法的基本思想如下。
1 )首先确定2幅影像的共同区域,并对共同区域进行网格划分和编号,使得2幅影像相同地理范围的区域编号相同。这是因为不在同一个地理范围的影像一般不存在正确匹配的控制点对,并且一般参考影像与待配准影像的地理范围可能存在差异。为了减少计算量,首先对参考影像和待配准影像进行共同区域的截取,然后对2幅影像共同区域进行网格划分并且编号,以便后续的区域匹配,并有利于降低算法时间复杂度。
2 )选取相同的编号,建立对应的多尺度空间,对每个影像区域先采用引入了多尺度空间理论的Harris角点检测方法检测特征点,然后利用SIFT特征描述符生成特征点的特征向量。这样,区域块中就可以提取到比较多的特征点,并且这些特征点具有尺度、旋转不变性,从而增加特征点的数量,提高特征点的鲁棒性。
3 )匹配特征点。采用区域匹配策略,在2幅影像对应区域块中进行特征点匹配,借鉴SIFT算法的特征点匹配方法,选取最近邻与次近邻的比值小于某个阈值所对应的匹配点对作为控制点对,其中阈值取值为0.4~0.8,阈值越小,提取的控制点对数目越少,但更加稳定。
HSIFT方法的处理流程如图1所示,主要包括影像网格划分、多尺度Harris角点检测、特征点描述与区域特征点匹配等过程,图1中Ri和Qi分别表示划分参考影像R后编号为i的影像块与划分待配准影像Q后编号为i的影像块。
2 技术实现
2.1 影像网格划分
首先可以通过参考影像与待配准影像经纬度信息判断2幅影像是否有公共区域,如果有,则对公共区域进行网格划分,以便后续的区域匹配。假设分块数目为m×n,对于大小为M×N的影像则会产生(M/m)×(N/n)块。对每一分块进行编号,使得具有相似地理范围的影像块具有同样的编号,如2幅影像中对应的第i块分别记为Ri和Qi。
2.2 多尺度Harris角点检测
2.2.1 建立多尺度空间
Harris算法能够提取到影像中大量的角点,但这些角点不能适应尺度变化,因此,将多尺度空间理论[9]引入到Harris角点检测。
尺度空间理论最早出现于计算机视觉领域,其目的是对图像数据的多尺度特征进行模拟,从而表达出图像的多尺度及其各个尺度间的关系。高斯金字塔[2]能有效地表达多尺度结构。高斯金字塔中多张图像合称为一组(octave),组内的每一张图像称为一层(interval),第1组的第1层图像为原图像,上一组图像的第1幅图像是由前一组图像的倒数第3张图像降采样得到,组内的多张图像通过高斯卷积得到,即利用高斯函数与图像进行卷积,如(1)式所示,这样就可以构建出高斯金字塔,如图2所示。

(1)式中:*表示卷积操作;σ为尺度因子;(x,y)代表图像上的点;I(x,y)为输入图像;L(x,y,σ)表示在尺度因子σ下的图像;G(x,y,σ)表示高斯函数,其具体定义为

σ越小,对应的是图像的细节特征,σ越大,对应的是图像的概貌特征,σ按照与常数因子k的积进行变化,其中,k=21/s,s是每一组的总层数。
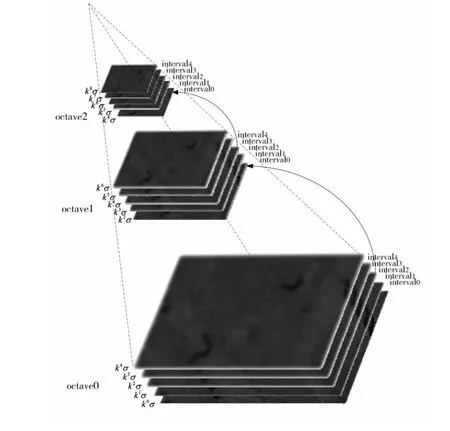
图2 高斯金字塔Fig.2 Gauss pyramid
2.2.2 具有尺度不变性的Harris角点检测
多尺度Harris角点检测方法首先通过上述方法建立影像的多尺度图像及其相互关系,接着采用Harris算子对每一个尺度图像进行角点检测。在尺度为σi的图像上,特征点的响应函数R(σi)定义为


步骤1 采用(1)式建立参考影像和待配准影像的多尺度图像。
步骤2 采用(3)式计算出尺度为的图像上的Harris角点。
步骤3 在尺度空间中,滤除伪角点。即比较当前尺度与小一尺度的影像上是否均存在该角点,如果存在,则保留此点;否则,删除此点。
2.3 SIFT特征描述符描述Harris角点
为保证特征点的旋转不变性,采用SIFT特征描述符对Harris角点进行描述。首先根据(4)式和(5)式,计算每一个尺度空间中像素点(x,y)的梯度模值 m(x,y)和方向 θ(x,y)分别为

计算以角点为中心的采样窗口的梯度方向直方图,选取直方图的峰值为该角点的方向,在对角点进行描述之前,将坐标轴旋转为角点的方向,这样,就可以达到旋转不变性。接着选取以角点为中心的N×N的采样窗口,将该窗口划分为n×n的(N/n)2个小窗口,计算第1个小窗口8个方向(00,450,900,…,3600)的梯度直方图,得到8个梯度值,按照方向排序后,8个梯度值作为该角点特征向量的第1到第8个元素;然后计算第2个小窗口8个方向的梯度值,按照方向排序后作为第9到16个元素;依次下去(N/n)2个小窗口就构成了(N/n)2×8维的特征向量,一般N=16,n=4,则形成了128维的向量。
2.4 区域匹配策略
经典的SIFT特征匹配算法采用的是欧式距离法,利用待配准影像与参考影像的最近邻特征点和次近邻特征点的距离比值是否超过一定的阈值来确定最终的控制点对,SIFT算法中,阈值取值0.8。在计算时,需要遍历整幅图像的特征点,而正确的控制点对一定会存在于相同的地理区域范围中,为减少遍历影像所有特征点的计算量,本文采用区域匹配策略,局部搜索参考影像与待配准影像中的特征点。具体步骤如下。
步骤1 将特征点的搜索范围限定在对应的区域块中,即 Ri和 Qi。
步骤2 计算Ri区域中每个特征点到Qi区域中所有特征点的最近邻和次近邻比值Di,其中,最近邻表示特征向量间欧式距离的最小值,次近邻表示特征向量间欧式距离的次小值。
步骤3 若Di小于某个阈值,则接受所对应的匹配点对作为控制点对,其中,阈值取值为0.4~0.8,阈值越小,提取的控制点对数目越少,但更加稳定。
3 实验与分析
多数文献通过目视的方式给出配准前后的遥感影像对比图,如文献[5-6],本文则重点对配准过程中的控制点提取方面进行实验,分别利用文献[4]中的算法与本文提出的改进方法HSIFT对低、中分辨率2组遥感影像进行控制点对提取实验,并分析比较结果。实验环境如下:Microsoft Visual Studio 2010,Intel(R)Pentium(R)CPU 1.87 GHz,内存大小2.00 GByte,Windows 7旗舰版。表1和表2中选取最近邻和次近邻的比值小于0.7,所对应的特征点对为匹配点对,若出现重复匹配、多对一匹配,则是误匹配,否则,是正确的匹配,匹配率为正确匹配点总数与匹配点总数的比值。
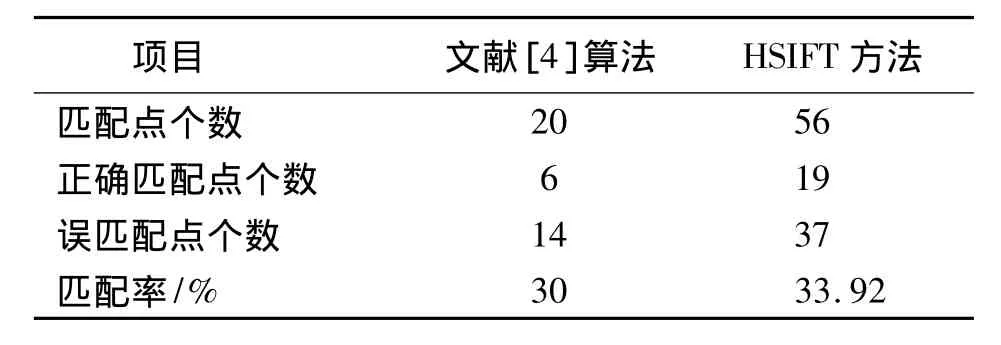
表1 HSIFT与文献[4]算法匹配结果对比Tab.1 Comparison of registration results between HSIFT and algorithm in reference[4]for low resolution remote sensing image
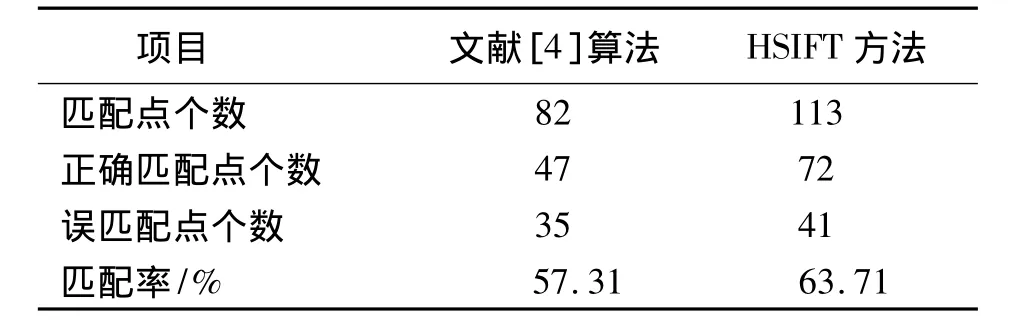
表2 HSIFT与文献[4]算法匹配结果对比Tab.2 Comparison of registration results between HSIFT and algorithm in reference[4]for medium resolution remote sensing image
3.1 低分辨率遥感影像
低分辨率遥感影像选用分辨率为1 km的AVHRR,MODIS影像。参考影像为MODIS的第1波段影像,待配准影像是AVHRR的第1波段影像,两者像素大小均为860×666,采用文献[4]算法和HSIFT方法进行控制点对提取的结果分别如图3,图4所示,图3左影像特征点总数为30个,右影像特征点总数为19个,图4左影像特征点总数为279个,右影像特征点总数为170个,实验结果如表1所示。

图3 低分辨率遥感影像采用文献[4]算法的控制点对提取结果Fig.3 Control point pair extraction results of algorithm in reference[4]for low resolution remote sensing image

图4 低分辨率遥感影像采用HSIFT方法的控制点对提取结果Fig.4 Control point pair extraction results of HSIFT for low resolution remote sensing image
3.2 中分辨率遥感影像
中分辨率影像来自于网址http://ids.ceode.ac.cn/query.html,参考影像为LANDSAT-5卫星于2008年10月7日拍摄的分辨率为30 m,像素大小为545×519的中分辨率影像,待配准影像为LANDSAT-5卫星于2009年1月27日拍摄的分辨率为30 m,像素大小为548×520的中分辨率影像,分别用文献[4]算法和HSIFT方法对图像进行配准处理,结果如图5、图6和表2所示。图5左影像特征点总数为96个,右影像特征点总数为46个,图6左影像特征点总数为1 637个,右影像特征点总数为1 877个。
结合上述2组图表可以看出,利用HSIFT方法进行中低分辨率遥感影像配准过程中控制点对的提取要优于文献[4]的算法,HSIFT不仅能得到更多的均匀分布的控制点对,也有较高的匹配率。

图5 中分辨率遥感影像采用文献[4]算法的控制点对提取结果Fig.5 Control point pair extraction result of algorithm in reference[4]formedium resolution remote sensing image

图6 中分辨率遥感影像采用HSTFT方法的控制点对提取结果Fig.6 Control point pair extraction result of HSTFT formedium resolution remote sensing image
4 结束语
本文结合SIFT和Harris算子,分析中低分辨率遥感影像控制点对自动提取方法。该方法将参考影像与待配准影像的公共区域进行网格划分,这有利于减少特征点匹配时的计算量,且使得控制点能够均匀分布。该方法同时引入多尺度空间理论的Harris检测角点方法检测角点,用SIFT特征描述方法对检测出的Harris角点进行特征描述,这不仅能从中低空间分辨率的遥感影像中提取出足量的特征点数,并且能保证特征点的尺度、旋转不变性。通过HSIFT方法能够获取到分布均匀、精度高的控制点对,有利于后续配准处理。
[1]苏清贺,程红,孙文邦.遥感图像配准方法研究—综述[J].红外,2010,31(10):1-6.
SU Qinghe,CHENG Hong,SUN Wenbang.Overview of remote sensing image registration methods[J].Infrared Technology,2010,31(10):1-6.
[2]LOWE D.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[3]MIKOLAJCZYK K,SCHMID C.A performance evaluation of local descriptors[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10):1615-1630.
[4]李晓明,郑链,胡占义.基于SIFT特征的遥感影像自动配准[J]. 遥感学报,2006,10(6):885-892.
LIXiaoming,ZHENG Lian,HU Zhanyi.SIFT based automatic registration of remotely-sensed imagery[J].Journal of Remote Sensing,2006,10(6):885-892.
[5]刘毅.基于一致性随机采样的图像特征匹配鲁棒确认[J].重庆邮电大学学报:自然科学版,2010,22(3):381-385.
LIU Yi.Robust verification for image feature matching based on RANSAC[J].Journal of Chongqing University of Posts and Telecommunications:Natural Science Edition,2009,32(6):50-53.
[6]倪希亮,丁琳,江涛,等.应用不变特征获取均匀控制点的遥感影像配准算法[J].测绘科学,2011,36(2):70-72.
NIXiliang,Ding Lin,JIANG Tao,et al.A remote sensing image registration algorithm by obtaining uniform control points based on invariant feature[J].Science of Surveying and Mapping,2011,36(2):70-72.
[7]韩舸,牛瑞卿.利用SIFT和静态小波变换的遥感影像配准方法[J].测绘科学,2012,37(5):61-64.
HAN Ge,NIU Ruiqing.An image registration method based on SIFT and SWT[J].Science of Surveying and Mapping,2012,37(5):61-64.
[8]HARRISChris,STEPHENSMike.A combined corner and edge detector[C]//Manchester:Proceedings of the 4th Alvey Vision Conference.[s.l.]:[s.n.],1988:147-151.
[9]LINDEBERG T.Scale space theory:a basic tool for analyzing structures at different scales[J].Journal of Applied Statistics,1994,21:224-270.
(编辑:田海江)
