两栖车辆实时控制水陆性能虚拟试验系统开发
2014-02-23剧冬梅项昌乐李军孙旭光刘静
剧冬梅,项昌乐,李军,孙旭光,刘静
(1.北京理工大学 机械与车辆学院,北京100081;2.中国兵器科学研究院,北京100089)
0 引言
虚拟试验是指在计算机上通过对试验环境、试验车辆、试验方法进行数字化集成,在虚拟环境下完成初步试验的手段,可以大幅度缩减研制周期和费用。目前,国外武器研制的虚拟试验技术已经到了实用化程度,我国虽然在高校和研究机构建立了一些虚拟仿真系统,但是还没有对两栖车辆进行系统全工况分析的虚拟试验系统。
区别于传统车辆,两栖车辆有水上、陆上、水陆过渡3 种工况。主流的仿真计算主要有两种:一是利用多体动力学软件平台进行陆上仿真;二是利用计算流体力学(CFD)软件进行水上性能仿真[1]。都是针对单一工况进行计算,无法满足虚拟试验多工况兼顾、高实时性、可操控性的要求。
本文基于粒子流体系统与多体动力学耦合建模,利用同步的视景系统作为操控界面,建立了两栖车辆实时控制水陆性能虚拟试验系统,包含水陆试验场数字化模型、两栖车辆动力学模型、逼真高效视景模型和实时同步的操控系统,能够完成两栖车辆水、陆、过渡3 种工况的机动性、平顺性、通过性、水上稳定性、航姿航态测定等大部分试验测试,为两栖车辆的设计与研制提供了全新的手段。
1 系统框架、计算流程及硬件条件
1.1 系统框架

图1 虚拟试验系统模型框架Fig.1 Modeling framework of virtual test system
本文所建立的虚拟试验系统基于Vortex 软件构建动力学模型、利用Creator 软件构建视景模型、以半实物装置(方向盘、油门、制动踏板等)接入虚拟系统完成操控。其中车体动力学建模部分基于传统多体动力学理论建模;水上试验场采用约束光滑粒子流场理论建模;地形视景采用高程数据进行逼真纹理贴图,对于有碰撞属性不同、材料不同的地表形态设置独立节点以便于程序里设置不同参数,例如水泥路、砂石路、特种路面、树、房屋等;车辆视景在CAD 模型基础上加上实车照片达到高逼真度,具有相对运动的部件设置独立节点以便于试验过程中对其进行独立操控;半实物仿真装置通过USB 口连接,通过动力学软件里的专用模块进行驱动及信息传输。总体的模型架构及模块之间的关系如图1 所示。
1.2 计算流程
进行虚拟试验计算时,通过车辆的加速、减速、转向、制动、换档等操作按钮(或手柄)及可控部件的操控完成试验项目。其中,可控部件包括炮塔、枪塔、可收放悬挂、滑板、翼面、舵面等。系统的特点是突出实时性,计算过程中运动状态与实车相仿,试验的操作过程和试验方法与实车试验相同,可参考GJB 59.64—2000“装甲车辆试验规程 水上性能试验”和GJB 59.71—2004“装甲车辆试验规程两栖装甲车辆水上射击试验”等标准,此处不做赘述。在该系统里可完成的试验项目及虚拟试验流程如图2 所示。

图2 虚拟试验系统的试验流程及试验项目Fig.2 The test process and items of virtual test system
1.3 硬件条件
系统对硬件的要求取决于视景模型、陆面模型和水上模型的颗粒度和复杂程度。视景模型和陆面模型越复杂、模型面数越多,水上模型计算域越广泛则计算量越大。
本文所建系统陆面模型总面数为5.6 万,车辆模型总面数为1 256,计算水域为100 m×50 m,所用计算机为HPz800 图形工作站,运行流畅,仅供参考。
2 模块功能及建模方法
2.1 车辆动力学模块功能及建模方法
该模块包含动力传动、车体、转向系统、行动系统、炮塔、枪塔、可控运动部件等子模块,是车辆的数字化模型,实现对车辆性能的仿真。
动力学建模采用多体系统动力学方法,建立几何模型和动力学模型,经过对模型的数值求解,最后得到分析结果,其流程如图3 所示。
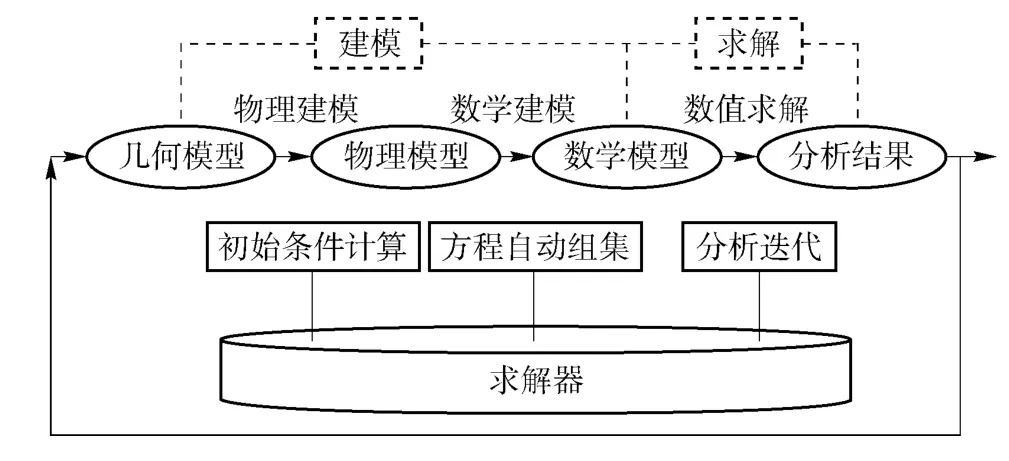
图3 多体系统动力学建模流程Fig.3 The modeling process of multi-body dynamics
对车辆各主要部件进行数学模型建模,主要的模型参数为:
1)车体。设置车体形状、重心、质量等参数。
2)动力传动模块。包含发动机、传动系统、水上推进三部分。其中:发动机用万有特性描述,这样做可以减小计算量,保证实时性;传动系统设置传动比序列、轴的转动惯量、输入输出变量、换挡策略等;水上推进系统通过发动机输出的动力按照推进效率、推力方向来计算得出水上推进力。
3)行动系统。设置车轮数量、车轮质量、车轮直径、车轮位置、车轮材料接触属性、悬挂的刚度、悬架阻尼、悬架限位等。
4)车辆运动件设置。如炮塔、枪塔、探测装置等与车体有相对运动的部件,需要设置运动件与车体的连接关系、约束类型、运动自由度、位移限制等。
2.2 视景模块功能及建模方法
视景模块的功能是将系统的计算结果真实、高效、实时地显示出来,以便于虚拟试验过程中对模型进行操控。
本文设计的视景系统基于OSG 的三维引擎,可以将视景模型调入动力学软件运行程序里,OSG 引擎导入模型,设置初始视点,并依据动力学软件解算的信息处理数据和指令,根据处理结果实时绘制更新场景,进行可视化仿真;同时OSG 引擎将视景模型各节点位置信息实时传回解算程序,做到人机交互,完成虚拟试验指令[2-3]。
2.3 陆面模块功能及建模方法
2.3.1 陆面模块功能
陆面模块包含路面高程、材料、碰撞属性等,是陆上试验场的数字化模型,为虚拟试验提供陆上试验环境。
2.3.2 陆面模块建模方法
陆上试验场的建模时首先导入* . dem 高程数据文件,根据实际试验场地进行调整,加入树、房屋、出入口等地形地貌特征,利用实拍照片对其进行纹理贴图,并在模型中加入路面碰撞属性,如材料、摩擦系数、摩擦形式等,模型如图4、图5 所示。

图4 陆面试验场模型结构Fig.4 The structure of virtual on-land test site

图5 陆面试验场模型Fig.5 The model of virtual on-land test site
2.4 水面模块功能及建模方法
2.4.1 水面模块功能
水面模块包含水面波形、水体密度、粒子碰撞属性等,是水上试验场的数字化模型,为虚拟试验提供水上试验环境,采用粒子流场与刚体碰撞的理论进行建模。
2.4.2 水面模块建模方法
首先要设置液体属性,包括密度、浮力方向、形状、水体颜色、原始位置,其次要在程序里设置水体运动函数(包含波高、周期等参数)、实时更新函数等。其中水体运动函数可以采用波浪普数据,因数据难于获取,本文采用数学函数代替,并根据海况标准对波高、周期进行设置,海况特性如表1 所示[4]。

表1 海况标准Tab.1 The sea state standard
2.5 水陆过渡模块功能
2.5.1 水陆过渡模块功能
水陆过渡模块主要用来实现两栖车辆入水、出水状态转换这个复杂的过程,是系统建模的重点,此模块的准确度直接关系到仿真计算的精度。
2.5.2 水陆过渡模块建模方法
水陆过渡模块只需要对水面、陆面、两栖车辆三部分进行动力学建模和耦合,视景部分利用陆面模块和水面模块的叠加显示即可。
动力学建模过程中涉及到流体、刚性陆面、刚性车体三者的耦合计算。本系统的解决方法是把流体离散成一个粒子集合,每个粒子的质量集中在质心并且不可压缩,粒子与粒子之间不存在摩擦力,只有根据标准的碰撞定律解算出的相互作用力[5],从计算原理上把流-固耦合问题转化为多个刚体的动力学碰撞问题。该模块的关键是粒子系统的建模,方法如下:
1)粒子的运动描述
系统中粒子i 的位置为pi(t),mi为粒子质量,其速度为动量为Li(t)=mivi(t),加速度为受到的作用力为Fi(t)=则粒子动力学状态为
2)粒子的力
粒子系统存在5 种受力。
一为全局受力F1,这类力的作用点在质心处,比如重力等。计算公式为F1=miai.
二为粘性力F2,计算公式为F2= -kvvi,其中kv为粘性力系数。
三为弹簧阻尼力F3,在这种力的作用下,粒子与粒子之间像存在一个弹簧和一个阻尼一样,力的大小取决于距离,计算公式为

式中:r0为“弹簧”无受力时两粒子的距离;r1、r2分别为两个粒子的位置;ks为弹性系数;kd为阻尼系数;v1、v2分别为两个粒子的速度。
四为有约束的空间力F4,计算公式为

式中:Fc为作用点所受的外力;ri为相对距离;R 为空间力起作用半径。
五为无约束的空间力F5,粒子之间的作用取决于两个粒子之间的距离,计算公式为

式中:m1、m2分别为两个粒子的质量;G 为万有引力常数。
本文所述系统只考虑前两种受力,包含重力、推力和粘性力。其中推力为两栖车喷水推进器所产生的作用力,由动力传动模块计算输出;粘性力表征流体的流动特性,根据水体属性和运动状态选取经验公式。
3)碰撞反应
粒子与刚体之间的碰撞反应过程如图6 所示。图6 第一幅图为粒子与刚体碰撞时间点tk前的状态;图6 第二幅图为粒子与刚体碰撞结束;所有粒子对刚体碰撞产生的力叠加等效为作用在质心的净力Fp和净转矩Tp,如图6 第三幅图所示;刚体对Fp和Tp作用做出反应,在计算步长h 后到达新的位置。
碰撞过程速度与力按下式[5]计算:

式中:n 为粒子数量;mi为粒子质量;vi为粒子速度;m 为刚体质量;v 为刚体速度。

2.6 虚拟试验方法
虚拟试验过程中,通过事件定制模块(Event subscribers)利用键盘、操控手柄或其他操控设备实现对虚拟车辆的操纵控制,完成试验流程,输出试验数据。事件定制模块根据车辆属性和试验要求设置事件触发条件、操控键、动作步长、控制参数等[6-8]。例如,对于对两栖车辆的喷水推进器进行加速(w)、减速(s)、左转向(a)、右转向(f)的控制代码为:

图6 粒子与刚体之间的碰撞反应过程Fig.6 The collision reaction process of particle and rigid body

3 计算实例

图7 某高速两栖履带车辆陆上平顺性虚拟试验Fig.7 The virtual ride comfort test of a high-speed amphibious tank
3.1 仿真模型
以某高速两栖履带车辆为例,该车战斗全质量28 t,陆上最高速度为70 km/h,水上最高航速达30 km/h,陆面环境采用某装甲兵试验场1∶1建模,水面环境为2 级海况的正弦波浪,其陆上、水上仿真状态如图7、图8 所示。
3.2 仿真与试验数据对比
通过与实车试验数据对比可以发现,该仿真方法的计算误差在15%以内,具有一定的准确度。部分对比数据如表2 所示。
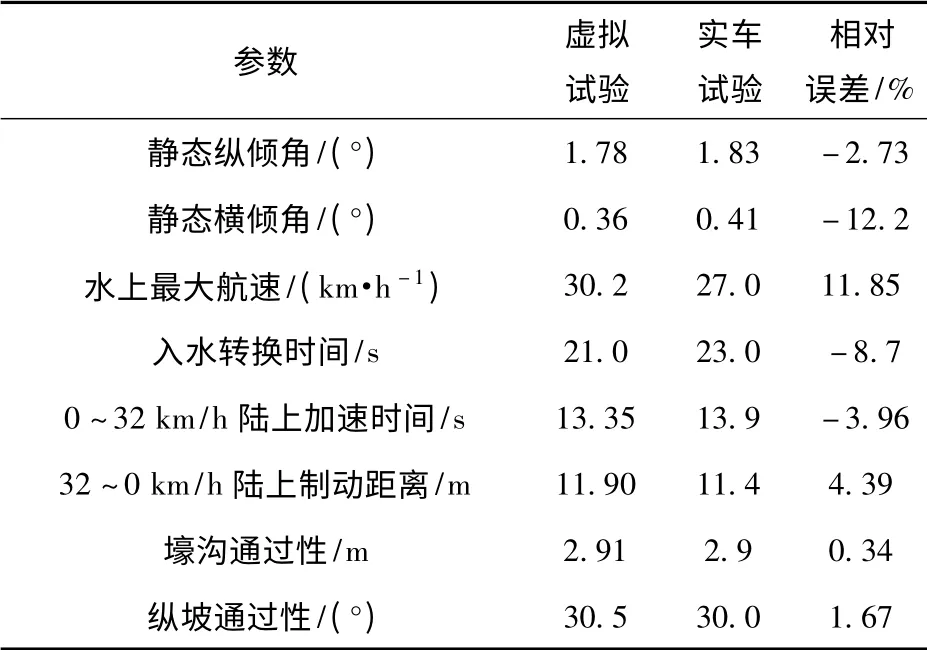
表2 仿真与试验数据对比Tab.2 The comparison of simulation and experimental data
4 结论
本文采用光滑粒子系统理论,通过建立粒子水域模拟水上试验场、虚拟地形模拟陆上试验场、动力学模型模拟实车状态、半实物操控程序完成试验车辆的操控,构建了一个高实时性的两栖车辆虚拟试验系统,能够完成两栖车辆绝大部分试验项目,通过仿真数据和试验数据对比、仿真姿态和试验姿态对比,具有较高的可信度。
References)
[1]王涛. 两栖车辆水上行驶流场的仿真[J]. 系统仿真学报,2007,19(11):5130 ~5132.WANG Tao. Simulation for flow field around sailing amphibious vehicle[J]. Journal of System Simulation,2007,19(11):5130 ~5132. (in Chinese)
[2]焦培刚. 基于Creator 和Vega 的某防护系统可视化仿真研究[J]. 系统仿真学报,2008,20(8):4082 -4088.JIAO Pei-gang. Research of visual simulation for protection system based on Creator and Vega[J]. Journal of System Simulation,2008,20(8):4082 -4088. (in Chinese)
[3]王金华,严卫生,刘旭琳. 视景仿真中的远程水下航行器坐标变换实现[J]. 兵工学报,2010,31(9):1145 -1149.WANG Jin-hua,YAN Wei-sheng,LIU Xu-lin. Coordinate transformation of long distance underwater vehicles in visual simulation[J]. Acta Armanentarii,2010,31(9):1145 - 1149. (in Chinese)
[4]黄彪,王国玉,王复峰,等. 绕水翼非定常空化流场的实验研究[J]. 兵工学报,2012,33(4):401 -407.HUANG Biao,WANG Guo-yu,WANG Fu-feng,et al. Experrimental study on unsteady cavitating flow around hydrofoil with particle imaging velocimetry system[J]. Acta Armanentarii,2012,33(4):401 -407.(in Chinese)
[5]Bodin K,Lacoursière C,Servin M. Constraintfluids[J]. IEEE Transactions on Visualization and Computer Graphics,2011(2):1 -12.
[6]张西勇,王树宗,李宗吉. 基于变结构的水下航行体航行姿态控制系统设计方法[J]. 兵工学报,2013,34(3):301 -308.ZHANG Xi-yong,WANG Shu-zong,LI Zong-ji. A method of navigating pose controlling sSystem design for underwater vehicle based on variable structure control[J]. Acta Armanentarii,2013,34(3):301 -308. (in Chinese)
[7]魏春雨,魏燕定,周晓军,等. 履带车辆模拟器转向盘系统的力特性研究[J]. 兵工学报,2012,33(2):221 -228.WEI Chun-yu,WEI Yan-ding,ZHOU Xiao-jun,et al. Research on force characteristics of steering-wheel system in tracked vehicle simulator[J]. Acta Armanentarii,2012,33(2):221 -228. (in Chinese)
[8]朱信荛,宋保维,王鹏. 无人水下航行器海底停驻流体动力特性分析[J]. 兵工学报,2012,33(8):934 -938.ZHU Xin-rao,SONG Bao-wei,WANG Peng. Hydrodynamic characteristics analysis of UUV parking on seabed[J]. Acta Armanentarii,2012,33(8):934 -938. (in Chinese)