电梯曳引机实验台控制系统的设计*
2014-02-11曾齐高闫莉丽
罗 飞,曾齐高,闫莉丽
(1.深圳技师学院,广东深圳 518040;2.深圳市龙岗职业技术学校,广东深圳 518172)
电梯曳引机实验台控制系统的设计*
罗 飞1,曾齐高2,闫莉丽1
(1.深圳技师学院,广东深圳 518040;2.深圳市龙岗职业技术学校,广东深圳 518172)
运用组态王和PLC技术,设计了电梯曳引机实验控制系统。系统具有运行参数设定、手动运行和自动运行的功能,能调整电梯运行过程中的直流制动时间、运行时间、平层时间和停梯时间,模拟实际电梯的运行,并能对各个运行继电器及运行状态进行监控。
电梯曳引机;控制系统;组态王;PLC;设计
0 前言
近年来,随着国民经济的快速发展,电梯已成为人民日常生活中必不可少的交通工具,电梯的安全也日益受到社会越来越多的关注。曳引机作为电梯运行的主机,其运行对电梯的安全运行起着至关重要的作用[1]。电梯曳引机实验是电梯运行实验的重要组成部分,不但需要控制曳引机的启动、停止和运行方向,还需要实现多种速度的控制,并针对不同曳引机、不同工况调整相关参数,如直流制动时间、运行时间、平层时间、停梯时间等。
本文根据电梯实验运行和模拟电梯实际运行的要求,运用PC电脑、组态王、PLC、变频器和继电器设计电梯曳引机控制系统。该系统不但能实现多种速度,模拟实际电梯运行;还能进行可视化操作,监控电梯曳引机的运行,界面友好、操作方便。
1 电梯曳引机实验系统的基本情况
1.1 控制系统的基本要求
电梯曳引机实验系统不仅要模拟实际电梯运行过程,还需要按照电梯实验的要求,对电梯的控制进行优化,要求如下:
(1)可实现电梯的启动、停止和运行方向的改变;
(2)可实现对电梯运行部件的监控,如抱闸(制动器)、变频器、电动机和各个继电器的监控;
(3)可实现对电梯运行参数的调整,如直流制动时间、运行时间、平层时间、停梯时间的设置和监控;
(4)可设置电梯运行的楼层和次数,通过此模拟实际电梯的运行;
(5)可设置电梯的运行方式,包括手动运行和自动连续运行两种;
(6)设置登录界面,对系统进行管理。
1.2 系统的组成
如图1所示,电梯曳引机实验系统主要由控制系统和曳引机组成。其中控制系统主要由PC、三菱FX2N系列PLC、安川L1000A变频器、继电器等组成;曳引机由电动机、抱闸(制动器)、减速箱组成。

图1 电梯曳引机试验系统
2 电梯曳引机试验控制系统的设计
电梯曳引机实验控制系统主要由PC、组态王、三菱FX2N-64MR系列PLC、安川L1000A变频器、继电器、制动电阻等元件组成。用户通过交互界面控制组态王,组态王控制PLC;再由PLC控变频器和继电器,并由变频器和继电器控制电动机;继电器控制抱闸(制动器),从而实现对曳引机运行的控制。

图2 控制系统原理图
2.1 硬件设计
2.1.1 PLC
本系统采用三菱FX2N-64MR系列PLC,具有控制简单、速度运行快,配置灵活的特点。可通过编程口、485通信口、CC-LINK通信口等实现多种通信和数据链接,系统具有64个I/O口,可用GX Developer软件采用梯形图、指令表、SFC进行编程,编程方便、直观。
2.1.2 变频器
本系统采用安川L1000A变频器,该变频器是电梯专用变频器。同步电动机和感应电动机都可以采用,具备旋转型和停止型自学习功能;具备高性能电流矢量控制,配合各种编码器和卡,可实现高低起动转矩,能实现V/f控制和无PG矢量控制;内置无传感器的启动转矩补偿,能保持制动松开时不发生位置的变动,可防止冲击;具备加减速补偿功能,能防止振动与过调;采用电梯专用的时序,可使电梯更平稳地运行[2]。
2.2 软件设计
系统软件主要分为两个部分,分别是PLC程序软件和组态王程序设计。PLC程序设计主要按照控制要求完成对各个继电器和开关的控制,组态王程序设计主要实现用户定义、参数设定、运行控制和各种状态的监控等。
2.2.1 PLC程序设计

图3 电梯PLC控制系统图
PLC程序设计如图3所示,程序采用模块化设计,分为主程序、自动程序P1和手动程序P2组成。主程序完成初始化参数、输入运行参数和选定工作方式;自动程序P1按照预设的各种时间参数、楼层和运行次数参数,自动完成电梯上下行模拟控制;P2主要完成各种手动运行控制,包括手动运行继电器控制、手动抱闸(制动器)控制、手动上下行控制等。
如图3和图4所示,电梯运行时,首先打开PLC,PLC进入自检状态;若没有错误,系统开始初始化,初始化直流制动时间D20(D22)为K90、运行时间D24(D26)为K100、平层时间D28(D30)为K90、停梯时间D32(D34)为K100、运行楼层D11(D12和D14)为K3、运行次数D15(D16)为K3和运行速度等;待初始化结束,系统开始检查是否按下紧急按钮X23,由X23控制M100,若按下,系统停止运行,若没有按下,系统进入运行状态;待进入系统运行后,输入系统运行参数,若组态王用户界面没有输入新的运行参数,此时按照初始化参数运行,若有新的参数,按照组态王输入新的参数运行;经过初始化、紧急按钮检查和参数设定以后,系统开始正式运行,可由自动运行M1选择自动程序P1和手动运行M2选择手动程序P2。

图4 主程序
2.2.2 组态王程序设计
本文系统采用组态王6.53版进行编程,组态王是由北京亚控科技发展公司设计的组态软件,包括工程管理器、工程浏览器、画面运行系统三部分组成[3]。其主要功能有:动画连接、实时监控、实时曲线、历史曲线和报警功能等。组态王支持国内外工控行业中大部分常见的PLC、板卡、变频器、智能模块、智能仪表等。本系统采用三菱的编程口进行通信,其与组态王的设备配置如图5所示。
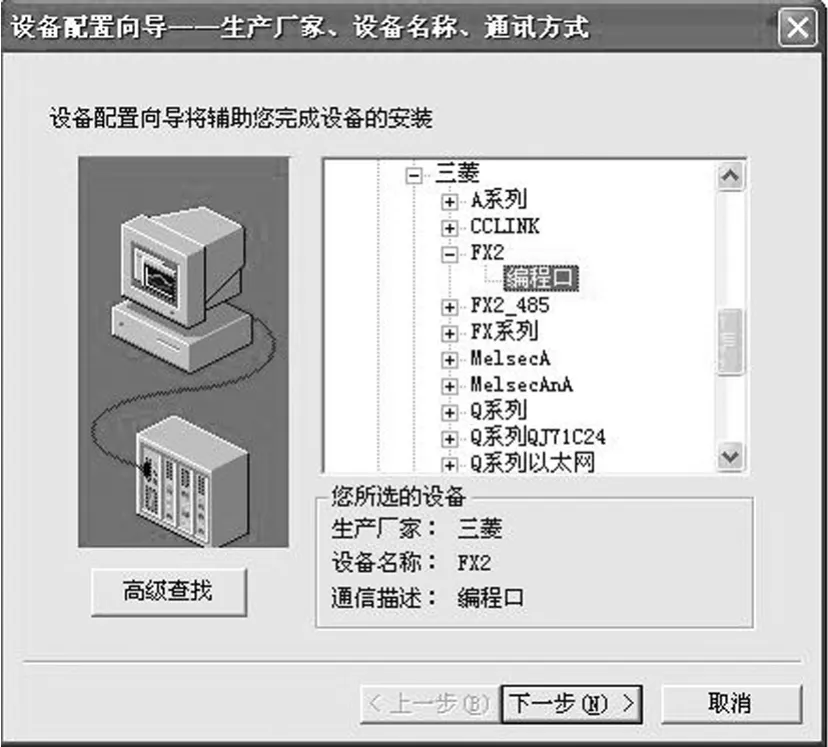
图5 组态王与PLC的设备配置
组态王程序设计如图6所示,主要分为六个部分,分别是用户登录界面、登录错误界面、主界面、自动参数设定界面、手动测试界面和自动测试界面。
如图7所示,系统启动时,首先自检并初始化,然后进入用户登录界面,若用户密码和用户名正确则进入主界面,若不对需重新输入或退出系统;主界面对各个功能界面的进行切换和管理,若完成实验则可点击退出按钮,完成实验。
(1)系统登录界面
系统登录界面主要实现对登录人员的管理,如图8所示,在用户名输入用户名并进行显示,在密码处输入密码,若正确则进入系统,若错误则重新输入,点击退出按钮则退出系统。

图6 组态王画面

图7 系统结构图
(2)系统主界面
如图9所示,系统主界面主要实现各个部分的切换,可点击各个界面控制按钮进入各个界面,若点击退出按钮,则可退出系统。
(3)自动参数设定界面
如图10所示,自动参数设定界面主要完成系统的直流制动时间、运行时间、平层时间、停梯时间、运行楼层、运行次数和运行速度的设定,完成设定后,点击返回主界面按钮返回。
(4)手动测试界面
手动测试界面,如图11所示,主要实现手动控制和状态的监控。其中控制可实现手动打开运行继电器、抱闸(制动器)继电器、上行、下行和停止,完成试验后,点击返回主界面按钮返回;状态的监控可监控运行、抱闸(制动器)、上行、下行、多段速1、多段速2和多段速3继电器,还可监控变频器的报警和运行状态。

图8 系统登录界面

图9 系统主界面

图10 系统参数设定

图11 手动测试界面
(5)自动测试界面
自动测试界面,如图12所示分为四个模块,分别是运行过程显示、接触器状态显示、运行状态显示和电梯控制。运行过程主要监控电梯的运行过程,从直流制动、正常曳引机运行、换速平层、到停梯开关门,完成电梯曳引机的运行监控;接触器状态主要监控运行、抱闸(制动器)、多段速1、多段速2、多段速3继电器、变频器报警和变频器运行输入信号,实时了解电梯曳引机各个控制状态;运行状态主要监控电梯运行方向、电梯运行速度(检修速度或正常速度)、电梯运行楼层、实验运行次数;电梯控制实现自动运行控制、停止和返回主界面。

图12 自动测试界面
系统工作时,首先启动实验开始按钮,系统开始上行,进入直流制动,打开运行和抱闸(制动器)继电器,待直流制动时间结束后、给定速度信号,启动运行,进入运行。进入相关楼层后,启动换速,运行结束,平层开始,进入平层;平层到达楼层后,启动停梯,电梯开关门,完成一层楼上行。如此循环,完成所有上行,待到达最高楼层后,电梯反向运行,运行完所有楼层后,系统完成一次运行。然后再上行和下行,直到完成所要求运行次数,实现模拟电梯的运行。
3 应用
完成硬件和软件的设计后,对系统进行调试和运行,调试主要有:调试系统用户登录界面,输入正确和不正确的用户名和密码,观察登录界面是否正常;调试主界面,点击主界面上各个按钮,观察是否能够顺利进入各个界面,点击退出按钮,观测是否能够退出系统;调试自动参数设定界面,分别输入各个参数,观察PLC上参数是否能够正确输入;调试手动测试界面,输入各种手动控制指令,观测相关继电器和组态王接触器状态显示是否正确;调试自动测试界面,启动运行按钮,观测PLC和组态王的各个继电器、时间显示是否符合设计要求。通过实验证明:PLC运行良好、各个接触器运行良好、变频器运行良好、曳引机运行良好、组态王控制和显示正常,系统整体运行良好,能模拟实际电梯的运行方式进行电梯曳引机的控制。
4 小结
本文运用PLC和组态王实现了对电梯曳引机实验系统的控制,一方面系统具有运行参数设定、手动运行和自动运行的功能;另一方面,通过PLC程序的设计,模拟了电梯的运行状态,保证了电梯曳引机的实验与实际电梯运行更加接近。本文结合PLC控制功能强和组态王界面友好、直观的特点,使电梯曳引机实验的控制操作方便、使用简单,大大提高了实验的效率和可操作性,且本系统设计方法在实验系统控制上有一定的通用性,也可应用于其他实验控制系统的设计。
[1]罗飞,曾齐高,陈恒亮,等.基于Pro/Mechanica的电梯曳引机承重梁的模态分析[J].机电工程技术,2014(02):57-60,101.
[2]邓隐北,张忠辉,刘勇,等.先进的电梯专用变频器L1000A[J].变频器世界,2010(11):102-106.
[3]黄少辉.基于组态王的电梯监控系统实现新方案[J].广东技术师范学院学报,2007(10):70-73.
Design of the Control System of Elevator Traction’s Test Platform
LUO Fei1,ZENG Qi-gao2,YAN Li-li1
(1.Shenzhen Institute of Technology,Shenzhen518040,China;2.Shenzhen Longgang Vocational Technical School,Shenzhen518172,China)
In this paper,the control system of elevator traction’s test platform was designed by Kingview and PLC.There were some functions such as setting operation data,manual and autorun in the system,which could adjust braking time,operating time,leveling time,running time,stopping time and monitor the relay and state of elevator by simulating the actual elevator.
elevator traction’s test platform;control system;Kingview;PLC;design
TP271.4
A
1009-9492(2014)08-0008-05
10.3969/j.issn.1009-9492.2014.08.003
罗 飞,男,1982年生,四川乐山人,讲师/高级技师。研究领域:机电一体化技术。
(编辑:阮 毅)
*深圳市科技研发新增资金技术创新专项计划先进制造项目(编号:CXZZ20120618172559759);深圳技师学院科研项目(编号:1111001)
2014-06-05
