焊线机超声波发生器数字化频率跟踪系统设计*
2014-02-10柯昌锵
柯昌锵
(广东工业大学机电工程学院,广东广州 510006)
焊线机超声波发生器数字化频率跟踪系统设计*
柯昌锵
(广东工业大学机电工程学院,广东广州 510006)
焊线机超声引线键合过程中,由于温度、压力、环境等因素的变化会导致超声换能器的谐振频率发生漂移。在分析超声换能器电特性的基础上,阐述了阻抗相位反馈调谐的原理以及基于FPGA的数字化频率跟踪系统的设计,与传统的方法相比,系统跟踪响应速度快,跟踪实时性好,而且跟踪频率范围宽,具有较强的实用性。
超声波发生器;FPGA;频率跟踪;数字鉴相器
0 引言
焊线机超声引线键合技术是指利用热、力、超声能量的耦合作用,通过超声振动和劈刀压力,将半导体芯片与焊盘、基板或电子封装外壳引脚用金属丝相连接的工艺技术[1]。工作时超声波发生器发出的电功率信号驱动压电陶瓷,压电陶瓷将电功率信号转换成机械振动,振动经变幅杆和劈刀传输,放大以后作用在键合界面上[2]。
焊线机工作中超声换能器随着温度、压力、环境等因素的变化会导致其谐振频率发生漂移,而谐振频率的漂移将使换能器的工作效率降低,甚至会损坏换能器元件[3],为了使系统输出功率最大,损耗最小,应使系统工作在谐振状态下。焊线机超声波发生器的好坏直接影响到焊接质量,要保证高效、可靠的焊线质量,超声波发生器的工作频率必须能跟随换能器的谐振频率。传统的模拟锁相环对电路集成化和数字化形成了制约,因此设计数字化自动跟踪谐振频率系统,对超声波换能器高效、稳定的运行具有重要的现实意义。
本文首先分析焊线机超声换能器的电特性,为阻抗相位反馈调谐提供理论依据;然后基于FP⁃GA设计数字化频率跟踪系统,与传统方法相比,本系统的跟踪响应速度快,跟踪实时性好,而且跟踪频率范围宽。
1 超声换能器的电特性分析
研究表明当超声换能器激励电功率信号的频率与换能器的固有频率一致时,换能器的振动处于稳定的状态,它服从受迫振动规律:

式(1)各参数的含义如下:m表示超声换能器的质量;Rm表示换能器的机械内阻;Cm为换能器的柔度;F(t)为换能器两端的电压与力电转换系数的乘积。
对换能器的性能进行分析时,可以利用机电模型的相关理论将机械系统模型等效为电学电路模型。超声换能器的等效电学电路[4]如图1所示。为:
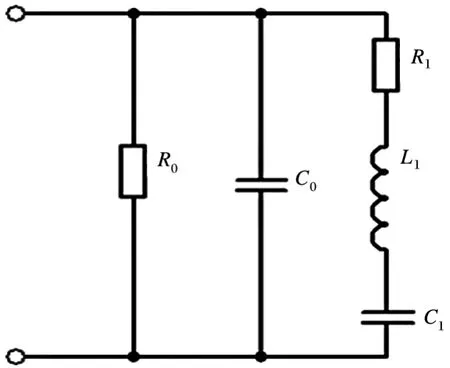
图1 超声换能器等效电学电路

比较(1)式和(2)式可知,动态电感L1、动态电阻R1和动态电容C1可以分别表征超声换能器的质量m、机械内阻Rm和柔度Cm。
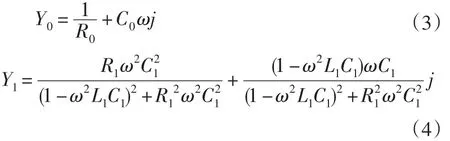
通过引入导纳模型可以简化电路分析,由电学知识可知,静态支路和动态支路的导纳分别如(3)式和(4)式:
换能器等效电学电路由动态支路和静态支路并联组成,其中动态支路又称为机械臂,由动态电阻R1、动态电感 L1、动态电容C1串联组成;静态支路又称为电学臂,由静态电阻R0和静态电容C0并联组成。机械臂的等效模型又可以表示
超声换能器的总导纳为:Y=Y0+Y1=G+Bj,联合(3)式和(4)式得:

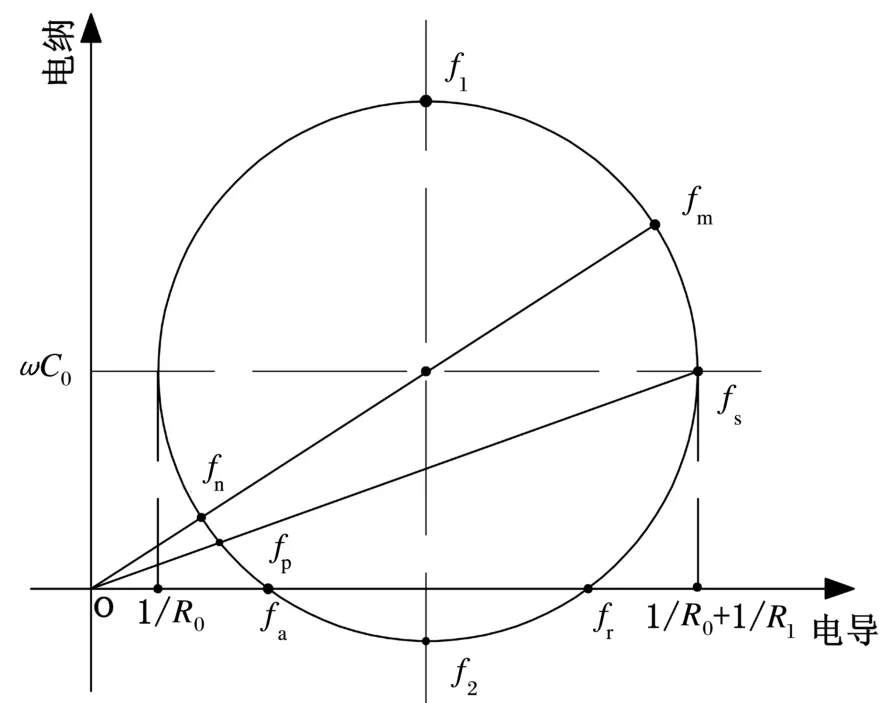
图2 超声换能器等效电路导纳圆示意图
导纳圆与电导坐标轴的交点 fr及 fa表示换能器等效电路呈纯阻性,分别定义为超声换能器谐振频率及反谐振频率。而对于换能器等效动态支路,当动态支路的电流与电压相位相同时,动态支路处于谐振状态,也表现为纯阻性,即机械臂处于谐振状态,此时谐振频率的大小为,对应于导纳圆上的 fs,称为机械谐振频率。
因此换能器的谐振频率与机械谐振频率为两个不同的频率,但对于焊线机超声波换能器,由于静态电容很小且动态电阻大,换能器的谐振频率与机械谐振频率相差很小,激励电功率信号的工作频率可以跟踪换能器的谐振频率[5],使换能器处于良好的工作状态。当换能器两端电压信号的相位超前电流信号的相位时,换能器呈感性,则系统需要降低工作频率;当换能器两端电压信号的相位滞后电流信号的相位时,换能器呈容性,则系统需要提高工作频率。基于此本文设计数字化的频率跟踪器来补偿相位差,使得换能器两端电压信号的相位逼近电流信号的相位,从而使换能器工作于谐振状态。
2 数字化频率跟踪系统总体方案设计
本文选用 Altera公司的 FPGA芯片EP2C5T144C8N作为信号发生器和数字化频率跟踪控制器。利用Verilog HDL硬件语言,基于FP⁃GA设计电功率信号产生模块及频率跟踪模块,总体结构如图3所示。

图3 信号发生器及频率跟踪总体结构框图
通过FPGA实现顶层控制模块、DDS信号产生模块、采样信号处理模块、数字鉴相器模块。数字化信号发生器DDS原理如图4所示,由相位累加器、加法器、波形存储器、D/A数模转化器与低通滤波器组成[6],通过输入频率控制字K控制输出电功率信号的频率。
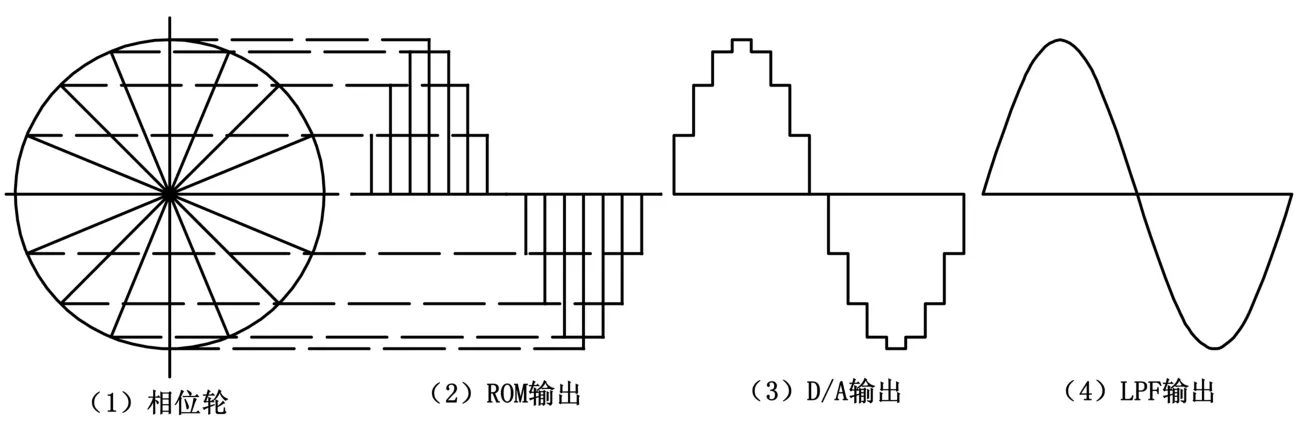
图4 DDS波形合成示意图
DDS的输出信号经数模转换和低通滤波器后得到一正弦波信号,再经放大电路和匹配电路处理,获得所需频率的电功率信号,驱动超声换能器工作。本系统数模转换采用的器件为AD557,该芯片内部集有精密基准电压源和薄膜硅铬电阻,薄膜硅铬电阻在整个工作温度范围内可保证单调性工作所需的稳定性,使电压在800 ns内达到±1/2 LSB精度。低通滤波器采用4阶巴特沃斯低通滤波器,放大电路采用的器件为LF347N。
当激励电功率信号的频率偏移换能器的谐振频率时,换能器两端的电压信号与电流信号则存在相位差,经采样电路、模数转换、总线收发器,将采样值快速反馈给FPGA芯片,再通过数字化采样处理模块及鉴相器来调整频率控制字K的数值,频率控制字K控制DDS的输出频率,实现对相位差的补偿,最终实现激励信号的频率时时跟踪换能器的谐振频率,保证换能器工作在最佳状态。
3 频率跟踪系统硬件电路设计
超声换能器频率跟踪的硬件电路必须能够精确、快速地获取换能器两端的电压和电流信号,并通过模数转换及总线收发器反馈给FPGA芯片。频率跟踪的硬件电路具体包括:信号采样电路、模数转换电路、总线收发器电路。
(1)信号采样电路
采样电路包括电流采样和电压采样。本文采用高频脉冲电流互感器法,能够真实地反映超声振动换能器电流变化情况。检测电路安装在输出端,采用耀华德昌公司生产的电流互感器TAK17-05,R18为采样电阻560 Ω,工作频率范围是2 kHz~200 kHz,电流采样电路如图5所示。
电压采样采用电阻分压法。用两个无感电阻进行测量,R1= 400 kΩ/2W,R2为一个10 kΩ的可调电阻。
(2)模数转换电路

图5 电流采样电路
模数转换电路如图6所示,选用型号为DG408的8路复用器,配合模数转换芯片AD573。8路复用器DG408的8号引脚为信号输出端,1、15及16引脚为输入信号选通控制引脚,其高、低电平由FPGA控制。模数转换器件AD573采用先进的集成电路设计和处理技术,无需外部器件,执行10位全精度转换的时间为20μs,可实现高速、高精度模数转换。
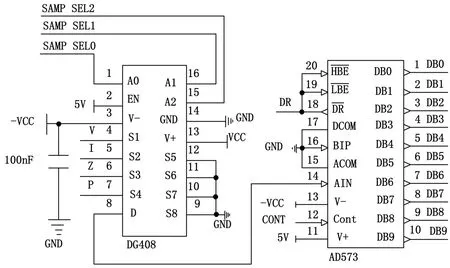
图6 模数转换电路
(3)FPGA总线收发电路
采样信号与FPGA的通讯用并行传送,提高传输速度,总线收发电路如图7所示,选用总线收发器的器件型号为SN74LVCC3245,该芯片有两个独立供电电源轨,双向电压转换,可实现数据从A总线到B总线或B总线到A总线的数字传递,传递方向取决于方向控制引脚DIR上的逻辑电平。本系统方向控制引脚接地,数据传输方向从B总线到A总线,即将采样信号传输到FPGA芯片内部。
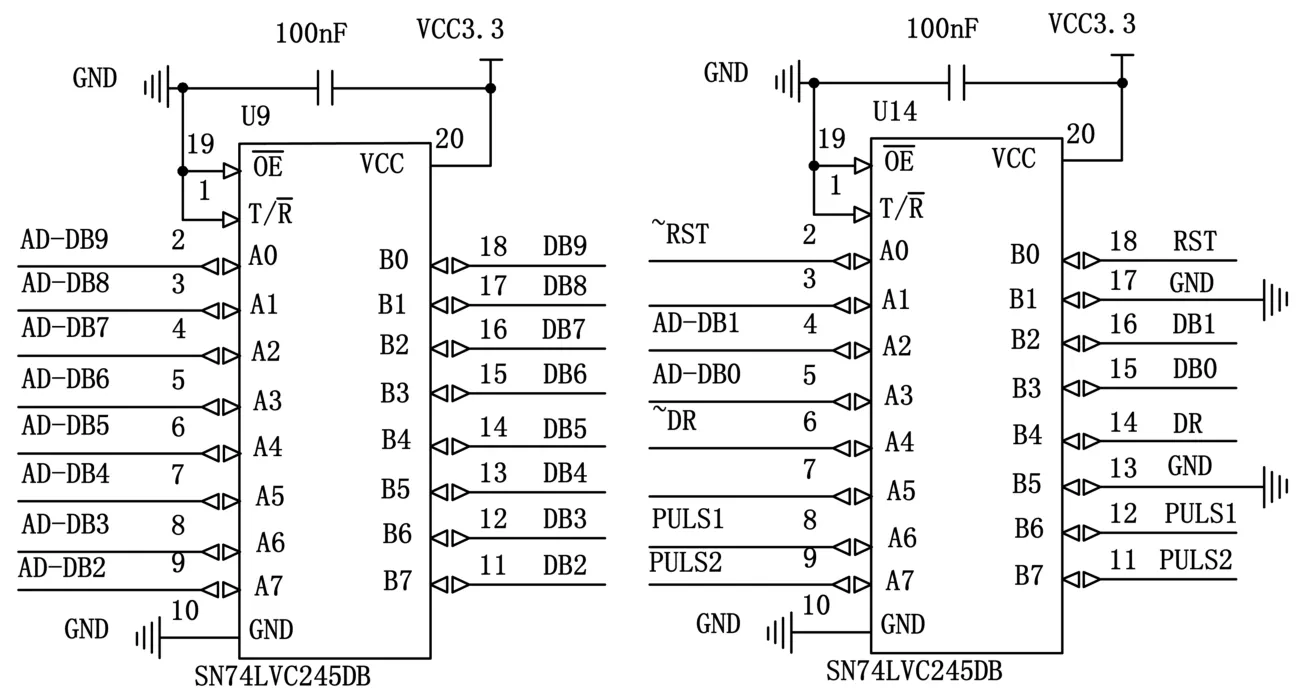
图7 FPGA总线收发电路
4 数字鉴相器设计
基于FPGA的数字化频率跟踪流程图如图8所示,FPGA内部包括DDS模块、采样信号处理模块、数字鉴相器模块。DDS模块将鉴相器输出的相位差信号数字化,再根据鉴相器输出的超前滞后信号,直接数字合成超声换能器所需频率的激励信号。采样信号处理模块通过电压和电流信号的零点判断,获取电压与电流信号的相位差。数字鉴相器模块根据反馈的相位差信号调整频率控制字的值。
数字鉴相器模块有四个输入分别是系统时钟clk,复位输入rst_n,反馈信号输入u1和u2;三个输出信号,dn,dnup和up。使用Verilog HDL硬件描述语言描述上述功能后,用QuartusⅡ综合后得到如图9所示。
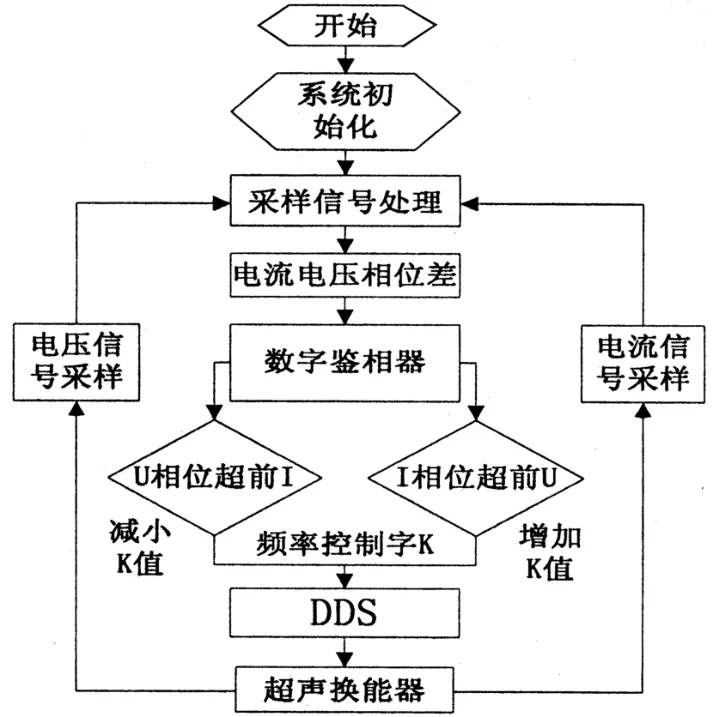
图8 FPGA控制流程图
当检测到u1信号的上升沿的时候,使dn持续输出低电平,然后判断此时u2信号是否为低电平,如果为低电平,那么up输出高电平;如果此时检测到u2上升沿信号,或者u2正处于高电平状态,up变为低电平。
当检测到u2信号的上升沿的时候,使up持续输出低电平,然后判断此时u1信号是否为低电平,如果为低电平,那么dn输出高电平;如果此时检测到u1上升沿信号,或者u1正处于高电平状态,dn变为低电平。
此数字鉴相器功能仿真图如图10所示。
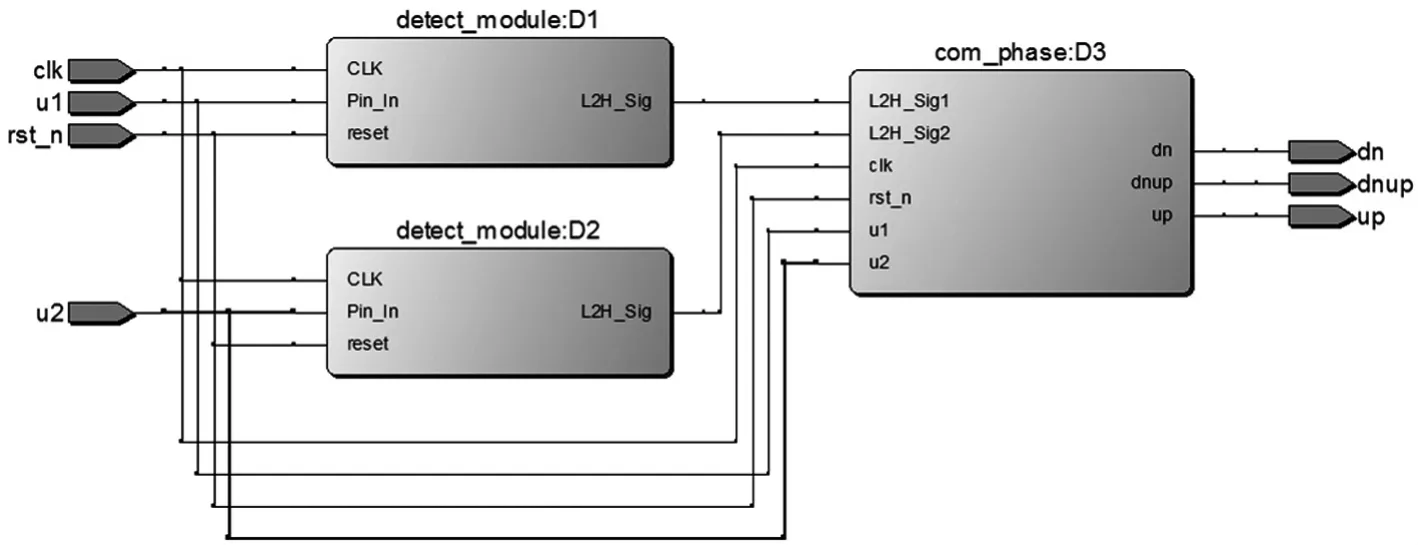
图9 数字鉴相器模块

图10 数字鉴相器功能仿真图
5 频率跟踪实验及结论
通过示波器测量换能器电压电流信号如图11所示,两者的相位差在±10°,换能器处于良好的工作状态。
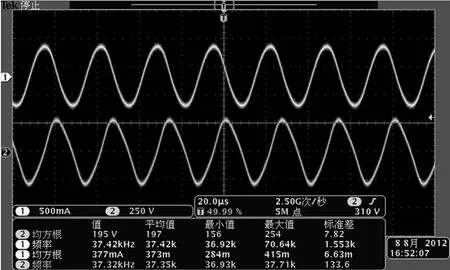
图11 电压/电流跟踪波形图
实验结果表明,该频率跟踪系统能够自动调整超声波发生器输出的工作频率,响应速度快,而且在较宽的频率范围内可以实时跟踪由外界条件的变化所引起的换能器谐振频率的变化,使得焊线机超声换能器的工作频率维持在谐振频率附近一个很微小的范围内波动,实现焊线机超声引线键合的频率自动跟踪。
综上,基于FPGA的电压电流相位差反馈式频率自动跟踪系统可以快速、精确地在零相差点进行校正,无跟踪频率范围限制,可以有效地应对换能器工作时频率漂移,使换能器工作于谐振频率附近,本方案是一种有效、可行的频率跟踪方案。
[1]Chiu S S,Chan H L W,Or S W,et al.Effect of electrode pattern on the out⁃puts of piezosensors for wire bonding process control[J].Materials Science and Engineering,2003,B99(12):121-126.
[2]武一民.引线键合系统设计理论与关键技术[D].天津:天津大学,2008.
[3]Kellogg R,Flatau A.Investigation of a Terfenol-D tun⁃able mechanical resonator[C].Proceedings of SPIE,2001(4327):550-559.
[4]Krimholtz R,Leedom D A,Matthaei G L.New equiva⁃lent circuits for elementary piezoelectric transducers[J].Electr.Lett,1970,6(13):398-399.
[5]戎强.基于DDS/FPGA的多波形信号源的研究[D].哈尔滨:哈尔滨工程大学,2008.
[6]张宏杰.热超声键合高频换能系统设计与控制[D].天津:天津大学,2012.
Design of Wire Welding Machine Ultrasonic Generator Digital Frequency Tracking System
KE Chang-qiang
(College of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
In the process of wire welding machine ultrasonic wire bonding,the resonance frequency of the ultrasonic transducer is drifted due to factors such as temperature,pressure,environment change.The principle of impedance phase feedback tuning was expounded based on the analysis of electrical characteristics of ultrasonic transducer,and the digital frequency tracking system was designed based on FPGA.Compared with the traditional method,this tracking system has some advantages such as tracking system response speed,good real-time tracking,wide track frequency range and strong practicability.
ultrasonic generator;FPGA;frequency tracking;digital phase detector
TP751
:A
:1009-9492(2014)10-0001-05
10.3969/j.issn.1009-9492.2014.10.001
柯昌锵,男,1987年生,福建三明人,硕士研究生。研究领域:运动控制及数字电路设计。
(编辑:阮 毅)
*广东省战略性新兴产业专项资金LED产业项目(编号:2011A081301001、2012A080303004)
2014-04-16
