日本机器人最新专利摘要选编
2014-02-10
日本机器人最新专利摘要选编
一、【发明名称】多关节加工机器人及加工方法
【专利编号】JP 2014-159051 A
【公开日期】2014年9月4日
【申请人】IHI株式会社
本发明提供多关节加工机器人及其加工方法,能够连续对工件进行加工、表面光洁度测试及再加工,缩短了加工和对表面光洁度测试的时间,稳定了产品质量。
加工系统由以下几个部件组成:1)多关节机械臂5;2)主轴电机7,配置在多关节机械臂5的前端部5b;3)加工工具C,当加工工件W时可有选择地安装在主轴电机上;4)测试探针P,能够替换加工工具C,安装在主轴电机上,可测试工件表面的光洁度;5)力觉传感器6,安装在多关节机械臂前端部和主轴电机之间,用于测量测试探针受到工件的外力;6)控制器8,可控制多关节机械臂和主轴电机的各种动作,还能根据力觉传感器在表面光洁度测试时取得的外力测试值,选择再加工或者终止加工。
【选择附图】

(a)多关节加工机器人侧面简略说明图
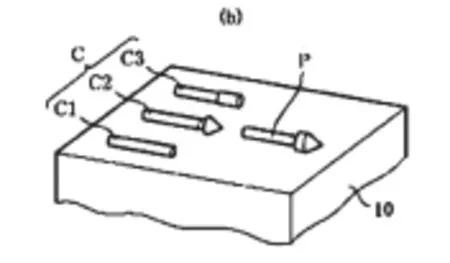
( b)摆放各种加工工具(包括测试探针)的工具台
【图中符号说明】
1多关节加工机器人
2机器人主体
3、4、5多关节机械臂
5a后端部
5b前端部
6力觉传感器
7主轴电机(电机)
8控制器
9 工装模具
10 工具台
C加工工具
C1柱形加工刀具
C2圆锥刀具
C3橡胶轮
P测试探针(测试工具)
W工件
Ws工件表面
E机器人底座
二、【发明名称】工件拣选装置以及拣选方法
【专利编号】JP 2014-172122 A
【公开日期】2014年9月22日
【申请人】本田技研株式会社
【摘要】本发明提供一种廉价的拣选装置。拣选装置20是一种将放置在第1场所21的泵壳10拣选抓握起来放在第2场所22的移动装置,由机器人移动机构23、安装在机械臂前端的线传感器25、抓握手段26、基于线传感器信息控制移动机构的控制部27组成。原采用照相机作为图像传感器,其价格昂贵、处理复杂。本发明采用廉价的线传感器,线传感器的线信息处理简单,处理装置也较便宜。
【选择附图】抓握装置正面图

【图中符号说明】
10工件(泵壳)
16孔
20拣选抓握装置
21第1场所
22第2场所
23移动机构
24机械臂
25线传感器
26抓握手段
27控制部
28基轴
29扩径爪
三、【发明名称】机器人示教系统及示教方法
【专利编号】JP 2014-166681 A
【公开日期】2014年9月11日
【申请人】安川电机株式会社
【摘要】本发明提供一种与示教者的熟练程度无关的操作简单、高效高精度的示教系统。机器人示教系统由机器人、力传感器、图像生成部、调整部、作业生成部组成。力传感器设置在机器人上,用于测试加在机器人机械手上的外力。图像生成部向示教者生成包括提示信息在内的示教操作画面。调整部基于示教操作画面上示教者的指定値以及力传感器的测试值,调整定义机器人动作指令的操作生成参数。操作生成部生成反映调整后参数的操作,参数包括机器人动作条件参数。调整部的功能是,把第1工件嵌入第2工件的嵌合作业分为接触动作、寻找动作、插入动作,并对有关接触动作、寻找动作和插入动作中动作条件参数进行调整。
【选择附图】机器人示教系统

【图中符号说明】
10控制装置
12存储部
12a力条件文件
12b动作条件参数
12c操作信息
20计算机
30机器人
31机械臂
32机械手
33力传感器
40编程示教盒W、W1、W2工件
四、【发明名称】摄影系统
【专利编号】JP 2014-177162 A
【公开日期】2014年9月25日
【申请人】赛考姆株式会社
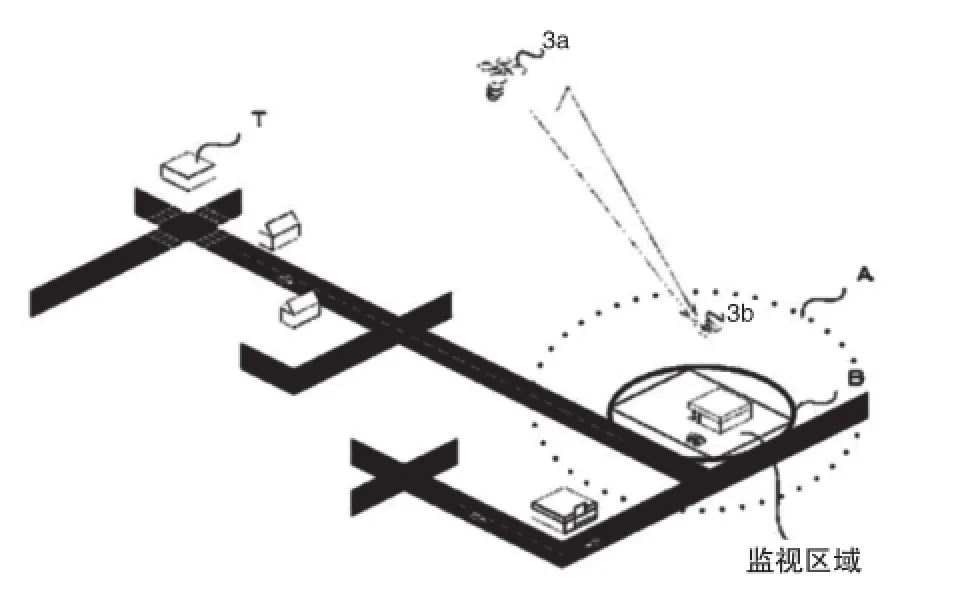
【摘要】本发明提供一种飞行机器人能够存储摄制的图像并且确定摄影区域的摄影系统。在需要监视的区域内,飞行机器人3a、3b利用摄影系统一边飞行一边摄影。摄影系统由记忆部、现在位置获取部、摄影许可部组成,记忆部记忆飞行机器人飞行范围的地图信息和地图信息中需要监视的区域,现在位置获取部测试地图信息中现在飞行机器人的位置,摄影许可部在飞行机器人到达包括需要监视区域的摄影许可区域A、B之前禁止摄影。
【选择附图】飞行机器人飞行图示说明图
【图中符号说明】
T待机场地
E监视区域
3a飞行机器人
3b飞行机器人
A、B 摄影许可区域
