人工智能进校园
——机器人DIY
2014-02-10赵姝颖孙浩胡彬田祥章
赵姝颖 孙浩 胡彬 田祥章
(东北大学人工智能与机器人研究所,沈阳,110819)
人工智能进校园
——机器人DIY
赵姝颖 孙浩 胡彬 田祥章
(东北大学人工智能与机器人研究所,沈阳,110819)
本文重点介绍组拼式教育机器人资源及基于此类资源教育机器人开发的流程与案例。
机器人,人工智能,DIY,组拼式,教育
0 引言
机器人技术被誉为“当代最高意义的自动化”,智能化程度不断提高是机器人技术发展的显著特征[1]。通过机器人DIY活动普及人工智能与机器人技术,是提高校园科普水平的一种创新尝试。机器人DIY活动采用技术培训和竞赛的方式,让学生个人或者团队通过完成一些具有一定难度的任务,学习人工智能与机器人技术,达到普及机器人知识、启发创新思维、激发创造能力、培养团队意识等效果,是提升青少年科学素养的重要途径之一。
1 组拼式机器人
1.1概念
组拼式机器人是利用符合一定标准和规范的机械、电气组件和与之相配合的软件开发环境,通过模块组拼实现机器人本体构造,再利用软件开发环境对所构造的机器人进行智能、感知和控制等功能设计,从而实现的特定功能的机器人。
1.2应用
1)工业领域的应用。
工业中使用机械手模组组拼的悬臂式或龙门式工业机器人属于组拼机器人的范畴。该类机器人以其灵活、精准的运动在焊接、组装、搬运等领域大展拳脚。
2)产品原型设计中的应用。
组拼式机器人可用在实验阶段,为产品的可操作性、创造性和可实施性等提供更多可能,帮助设计者更好地改良产品,提高产品性能。
3)教育领域的应用。
随着智能机器人技术的迅猛发展,组拼式机器人可以帮助学生打开通往科技的窗户,在素质教育和机器人基础教育中起到启蒙作用。
1.3资源自主开发
随着3D建模仿真技术和3D打印技术的迅速发展与应用,机器人组件的及时补充成为可能,组拼式机器人可以不再局限于现有资源。这不仅提高了机器人开发的效率,更促进了创造性思维的拓展。
2 组拼式教育机器人资源
2.1 国内外教育机器人资源概况
教育机器人是指面向教育领域开发的机器人成品、套装或散件,包括机器人本身、控制软件、教学材料等。
随着机器人技术的发展,其在教育领域的应用逐步得到重视。在国外,机器人教育一直是热点。早在1994年,麻省理工学院就设立了 “设计和建造LEGO机器人”课程,目的是提高工程设计专业学生的设计和创造能力,尝试将机器人教育与理科实验整合。目前,国内已有一些科研机构和公司正在陆续进入教育机器人领域,不同种类的教育机器人产品和相关教学平台不断得到开发和应用[2]。
2.2教育机器人资源的特征
从外形上,教育机器人可以分为两类:一类是有基本形状的机器人,学生可以在此基础上增加模块,进行改装;另一类是没有固定形状,只有一堆零部件的积木式机器人,学生可以根据自己的想象来自主搭建各种形状的机器人[3]。教育机器人资源有如下特征:
1)开放性。
教育机器人的套装中有各种结构的积木,学生可以利用这些积木进行设计和搭建,在搭建过程中可充分发挥其组织灵活性。一套组件可以运用到多项机器人的组拼中,老旧机器人也可以拆除后重新组拼成新的机器人。
2)可选配性。
现在市场上有各种各样的教育机器人资源,这为机器人制作提供了资源组合多样性以及零配件可选择性。组拼大型自动化模型,可以实现多套组件兼容组拼,并且可以使用多控制器实现并联控制。
3)可扩展性。
现有教育机器人资源都可以为用户提供一个教学平台,支持用户自主开发新资源,其硬件也可以通过3D打印技术对组拼资源进行快速补充。
2.3基于组拼式机器人资源的教育活动
1)基础知识传播。
机器人活动涉及多个学科,如数学、电子、光学、力学、电学、超声波学、自动控制等。通过组拼式机器人的组拼过程,这些知识的学习和掌握完全可以由学生自己主动探究来获得,在普及机器人知识的同时,这极大地提升了学生对机器人科学的兴趣。
2)基本技能训练。
在机器人活动中,一方面学生进行搭建和拼装,是一个需要动手实践的过程;另一方面,学生通过不断的实践去发现问题、分析问题和解决问题。学生通过对简单结构的组拼,可以深化其对组拼资源的认识,并熟悉各种组拼形式,便于其以后灵活运用到各个组拼机器人的结构设计中。
3)科技活动组织。
比赛是一个总结经验和提升技术水平的过程。比赛过程会使学生体会到成功的喜悦和失败的烦恼,更重要的是经历挑战的过程。组拼式机器人可以用于参加科技竞赛、科学普及、科技展览等多个领域,为各个年龄段的用户提供全方位的组拼体验。
4)团队意识培养。
在机器人竞赛活动中,团队里每一个人都至关重要,成员间需要相互依赖,为共同的目标去努力,发挥各自的特长实现能力互补。在这一过程中,成员产生集体荣誉感,为自己的团队去努力和拼搏。
3 机器人DIY
DIY(Do It Youself),与此前只能由专业技术人员完成设计过程的很多设备本体不同,它提供了一种大众可参与的科技活动模式。机器人DIY是利用组拼式机器人资源,通过选配、拼接和系统调试等过程,开发参与者预想功能的机器人科研活动。
机器人DIY活动的参与者,首先要了解机器人的组成。一般的机器人DIY要先从机构DIY做起。
3.1机器人组成
一般来说,机器人包括执行机构(机器人本体机械机构)、驱动装置(马达等动力装置)、检测装置和控制系统等。
3.2从机构DIY到机器人DIY
对于初学者,应先从机器人的机构做起,通过机器人组件,组拼一些可以实现的简单机构,如平行四边形结构、三角形结构等,并且熟悉机器人组拼中各种结构的特点及作用。接下来,可以做一些传动机构的组拼,比如齿轮传动、带传动、蜗轮蜗杆传动、平面连杆传动、差动机构传动等,达到熟悉采用某种传动方式能够让机器人平稳运动的程度。完成上述任务后,学生就可以尝试组拼自己的第一个机器人了,制作中要注意合理组合各种机构,保证机器人在运动过程中平稳、灵活、精准。
3.3机器人DIY流程
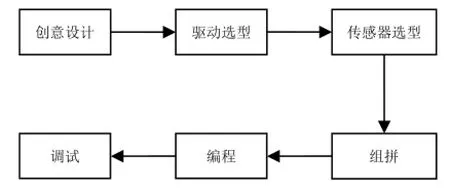
图1 机器人DIY流程
1)创意及系统设计。
熟悉机器人的各个机构后,学生就可以尝试完成自己的设计创意。在设计机器人时,先制定设计方案,考虑机器人的功能和所要完成的任务要求,最好使机器人结构便于拆卸,即功能模块化的结构设计,需要的时候可将一些模块用在其他项目上。在设计机器人结构时,也要考虑到某些重要组件的更换、电源充电以及控制的方便性等。
2)结构构思和组拼过程。
组拼机器人是一个创造的过程,需要有创新的理念。机器人组拼过程一般分为四个步骤:第一步,根据初步设计方案制定出机器人的框架结构;第二步,选择合适的驱动机构,通过马达与机械结构的配合,使机器人动起来;第三步,给机器人选择适合的传感器,使机器人感知工作环境;第四步,为其适当添加辅助传感器,进一步提高机器人的智能性。
3)软件编制。
想编出好的程序一定要有好的程序设计理念。编程指令中,一般尽量避免出现复杂指令,编程语言简短明了[4]。程序一般由开始、等待、循环、分支、终止五部分组成[5],通过控制器和传感器实现机器人的开始及等待功能。在机器人编程中,要充分发挥控制器的循环优势,这样程序更简洁,也便于操作者修改。
机器人应该具有识别错误的能力以及状态分析能力。因此,我们在程序编写中应提前考虑到程序运行过程中可能出现的导致程序不能按照预期完成任务的因素,并对这些因素考虑好应对方法,在出现错误时及时调用备选程序。这样做可以让我们在完成任何任务时都游刃有余。
4)调试与改进。
每个机器人的组拼都不可能一步到位,组拼后要经过多次调试,记下试验记录,对不足的地方进行适当改进。一款完美的机器人要经得起考验,能够在任何时间、任何地点精准展示其柔美的运动曲线。

图2 单杠机器人
4 机器人DIY案例
4.1单杠机器人
1)创意及系统设计。
单杠机器人创意源于运动场上矫健的运动健儿,他们用身体与力量完美演示了生命的曲线。想让机器人像人一样自由运动于单杠之上,就要设计一个有手有脚、可以在单杠上通过对惯性合理运用达到表演效果的机器人。

图3 单杠表演
2)结构构思。
机器人做单杠表演,就要有单杠和可以表演的机器人。将单杠与机器人组拼在一起即为单杠机器人。
单杠的搭建要考虑到机器人在运动过程中结构的稳定性,故基座采用平行四边形结构,支撑采用三角形结构。
用乐高马达作为机器人的腿为机器人提供动力;以乐高NXT控制器作为机器人的身体,实现图形化编程,使机器人便于控制;以乐高标准件作为身体与单杠的连接(机器人的手),该连接采用乐高组件中与标准件间隙配合的销,以减少机器人表演过程中产生的摩擦阻力。
3)软件编制。
单杠机器人主要依靠驱动马达的快速转动来实现运动状态的控制。给驱动马达一个转动的角度及运动速度,使其在初始状态下能够具有顺时针的转动惯量,到达最高点后使马达逆时针转动,给机器人施加一个反向的冲量。按照上述过程控制马达循环运动,根据系统的固有频率设置恰当的循环周期,使其能够连续翻转。
4)调试与改进。
通过多次调试,根据实验数据调整机器人双腿的摆动间隔、角度、速度等,使机器人充分利用惯性,并控制惯性在单杠上自由发挥表演。
4.2蝎子机器人
1)创意及系统设计。
本系统设计以乐高NXT控制器作为蝎子机器人的身体;以乐高超声波传感器作为机器人的眼睛,超声波传感器在其前方30cm处检测到物体时,机器人尾部会以一定速度来击打;以乐高触碰传感器作为蝎子尾部末端,当触碰到物体时,尾巴立即收回。
2)结构构思。
蝎子机器人由控制器构成的身体部分、乐高标准件构成的手抓部分和尾部攻击部分组成。
根据蝎子的体貌特征,用乐高控制器和乐高超声波传感器组拼成蝎子机器人的身体部分,其6条腿由2个马达配合双摇杆机构实现前后运动,尾部采用平行四边形交叉升降原理,实现对物体的攻击,尾巴末端加装触碰传感器。

图4 蝎子机器人
3)软件编制。
要让机器人的尾巴能够灵敏地感应到物体,首先需要给超声波传感器一个合适的距离值,使其反应足够灵敏。当光电传感器检测到物体时,尾部需做出攻击动作,尾部的控制需要调整马达的转速及旋转角度来实现剪叉机构的伸缩,使尾部能够达到物体目标位置并触发末端传感器使尾巴及时收回。

图5 3D打印仿人机器人
4)调试与改进
组拼完成后需根据机器人的尾部运动轨迹对组件的长短、连接件的松紧程度进行调整,使其达到平稳,灵活、精准。另外,还需不断测试各个传感器的反应时间。

图6 3D建模
4.3仿人机器人
1)创意及系统设计。
如今市场上的仿人机器人多为国外进口,在组拼与扩展方面相对保守,用户可用的资源受到生产厂家的约束。3D打印技术的发展使得机器人组件的独立设计成为可能,资深机器人玩家可以尝试为机器人更换控制器来达到扩展控制的目的。
图7 十字交叉连接件
仿人机器人一般采用舵机传动,用17个舵机做成一个具有17个自由度的仿人机器人,对应人体的17个关节。通过连接件将舵机组拼成人的形状,并且能够像人一样自由运动。
2)结构构思。
由于采用PLA材质打印机器人的连接件,故须对零件结构采取加厚和加固设计,保证其结构强度。腿部的相邻舵机连接采用的连接板结构简单、受力均匀、不易损坏,故只需加厚即可。相邻舵机有方向转换的部位采用交叉连接件(见图7),由于安有支臂结构,且受力都集中于支臂处,容易发生弯曲、断裂现象,故除加厚设计外,还须进行局部加强处理,使机器人在运动过程中其支臂结构在各个角度都能承受机器本身带给连接件的压力。
对于仿人机器人,其平衡性是设计的重点,控制器及电源的安装位置决定机器人的重心位置。重心的位置对仿人机器人的平衡性起到至关重要的作用。将控制器及电源安装在身体的正中部位,便于机器人平稳站立,同时为机器人安装合适的陀螺仪传感器,使机器人能够随时监测自己的姿态。仿人机器人一般采用无线控制,安装红外传感器使其能够接收到使用者的控制信号。
3)软件编制。
仿人机器人的编程,首先需为其量身定制好开机等待程序,使机器人在开机后能够保持平稳的站立姿态等待接收命令,并且通过陀螺仪传感器时刻检测自己的状态。另外,还可设立多个程序入口,根据接收信号的不同做出相应动作。
仿人机器人具有与人类相似的形态及关节,可以模仿人类的动作,在编制程序时可以参照人类的运动方式为机器人制定动作,还可以以示教再现的形式给机器人输入每个pose(机器人姿态)参数,在各个pose间添加循环、等待、延时等命令,使机器人具有表演舞蹈的能力。
4)调试与改进。
机器人设计中一些考虑不周的地方会导致机器人局部关节发生干涉,针对这些干涉状况应及时进行处理。另外,还可以通过一次次的调试给机器人编制合理的程序,如编制机器人舞蹈、机器人上楼梯等。
5 结束语
机器人DIY实现了一种立体感知的学习模式,把之前的知识系统组合、灵活形象地运用到机器人的组拼过程中,从而使参与者学到更多的知识,由此产生对机器人设计的乐趣,促进学习进程的不断提升。
目前,机器人教育资源仍显匮乏,人工智能进校园还停留在利用现有资源进行DIY组拼式机器人设计与实现的阶段。随着仿真技术和3D打印技术的拓展应用,相信人工智能与机器人技术在提升校园科普水平、推动校园科普事业发展方面,必将发挥越来越重要的作用。
[1]赵姝颖. 加快机器人科普教育迎接机器人走进我们生活[J].机器人技术与应用,2012(2):18-19.
[2] 张剑平,王益.机器人教育:现状、问题与推进策略[J].中国电化教育,2006(12):65-68.
[3]吴洁,何花,周波.浅谈教育机器人[J].中国教育技术装备,2006(7):14-16.
[4] 城井田胜任. 机器人组装大全[M].金晶立,译.北京:科学出版社,2002.
[5]郑剑春,赵亮.乐高——实战EV3[M].北京:清华大学出版社,2014.
本项目获得沈阳市科技计划项目资助,项目编号:F14-214-5-00;获得中央高校基本科研业务费项目资助,项目编号:N110804005。
