大型海上风电机组变桨距PID控制策略研究
2014-02-08李永明宋聚众尹景勋王其君林志明
李永明,宋聚众,尹景勋,王其君,林志明
(东方汽轮机有限公司,四川德阳,618000)
大型海上风电机组变桨距PID控制策略研究
李永明,宋聚众,尹景勋,王其君,林志明
(东方汽轮机有限公司,四川德阳,618000)
文章针对大型海上风机的叶片具有较大惯性的问题,分析了传统变桨距PI控制器的不足,从而设计出带有超前环节的变桨距PID控制器,其能改善因惯性较大而导致的不良控制效果,并通过典型工况的仿真计算及性能分析,表明PID控制器的整体性能优于PI控制器,不仅具有稳定风轮转速、减轻风机振动的优点,还降低了风机的极限载荷水平,从而在保证安全性的基础上降低了机组成本。
变桨距,PID,海上风电机组
0 引言
随着新能源在全球的兴起,风力发电技术也在日益进步,从常见的1.5 MW、2 MW陆地风机到5 MW、6MW大型海上风机的研发设计,新的技术难题也相继出现。其中,变桨距控制的优化设计既是现阶段大型并网风力发电机组研究的一项重点,也是研究的难点[1]。
变速变桨风电机组在低风速时通过调节发电机转矩使风轮按照最佳叶尖速比运行,追踪最佳风能利用系数,高风速时通过变桨限制气动力矩,稳定功率输出[2]。因此,大型尤其是兆瓦级以上的风力机大都采用了变桨距控制技术。目前,变桨距控制技术在工程上一般采用PI控制器[3],但随着机组容量的不断增大,各部件 (叶片、塔筒和轮毂等)的质量和所承受的载荷也逐渐增大,因叶片惯性或滞后性而导致载荷较大是其重要原因之一,从而设计出可以补偿滞后性的PID控制器,其相对于PI控制器,一定程度上稳定了风轮转速,降低了风机极限载荷水平。
1 变桨距PID控制简介
在工程实际中,应用最为广泛的调节器的控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。当被控对象的结构和参数不能完全掌握或得不到精确的数学模型时,系统控制器的结构和参数必须依靠经验和现场调试来确定,如兆瓦级风力发电系统是典型的非线性、多变量、强耦合、时变的复杂系统,很难建立准确的数学模型,最适合用PID控制技术[4]。PID控制中,根据实际情况可以分为P、PI、PD和PID等控制组合。
1.1 比例(P)控制
比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时,系统输出必须存在误差 (但不是稳态误差)才能输出相应的控制量,存在控制量死区、精度较差等缺点。因此,对于稳定性、精确度和快速性要求较高的变桨距控制不适合P控制。
1.2 积分(I)控制
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,为了消除稳态误差,在控制器中必须引入 “积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分 (PI)控制器,可以使系统在进入稳态后无稳态误差,也是现阶段变桨距控制普遍采用的控制策略,但对于具有较大惯性或滞后性部件的系统,在控制的快速性方面表现略有不足,特别是若I参数调节不好,很容易产生超调、振荡等不稳定现象。
1.3 微分(D)控制
在微分控制中,控制器的输出与输入误差信号的微分 (即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是存在有较大惯性组件或有滞后性组件,其变化总是落后于误差的变化。解决的办法是引入有抑制误差作用的 “超前”环节,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作用仅是误差的幅值比例关系,而需要增加的是 “微分项”,它能预测误差变化的趋势。这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调,达到了改善大型海上风电机组的动态性能。
2 变桨距PID控制器设计
本文以公司大型海上5.5 MW风机FD140为研究对象,风机轮毂中心高度90 m,扫风直径140 m,单支叶片质量约为28 t,叶片惯性较大,再考虑到恶劣风况 (气动载荷)的干扰,叶片动作的滞后性对于控制性能的影响显得极为重要。但叶片的惯性是本身的固有属性,若减轻质量则降低安全性,若更换材料则增加成本,所以若能在控制策略中改善或解决此问题,是比较经济可行的办法。这就使得控制过程中引入 “超前”环节 (微分项D)成为了必要,因此设计出变桨距PID控制器,来改善叶片本身的惯性对于控制效果的影响,从而优化了控制器性能,达到了降低风机极限载荷和稳定转速的目的。
变桨距PID控制器设计原理如图1所示,PID控制参数采用查表插值法,即参考不同桨距角来插值得到相应的PID各参数,为了具有较好的对比性,这里的PID控制器和PI控制器的主要区别在于加入了KDPS参数,其他控制参数如滤波器等完全相同。

图1 变桨距PID控制
其中:

式中,KPPS、KIPS、KDPS分别是比例、积分和微分增益系数;PitchStep是变桨距控制器周期;Td是微分控制项的一阶低通常数。
3 关键工况对比分析
根据GL 2005海上风机设计标准设计载荷工况,使用业内著名软件GH Bladed仿真计算。主要针对3种典型工况进行控制器性能的分析,分别是EOG、ECG和NTM工况。
3.1 EOG风模型分析
此工况是模拟风机遭遇50年一遇的极端工作阵风 (EOG)的极限载荷情况,其风速变化极端恶劣,一般会导致快速停机或安全链停机,风机各部件承受的载荷较大,本次仿真的具体工况说明详见表1。

表1 EOG工况信息说明
从图2可见,风速幅值的变化情况是先减小后急速增大的一个对称变化过程,因而会使叶片在短时间内完成开桨和收桨的动作,但因风速提升时速度极快且叶片存在较大的惯性或滞后性,叶片不能及时地从开桨状态转变为收桨状态,最终导致严重超速及风机的极限载荷较大。
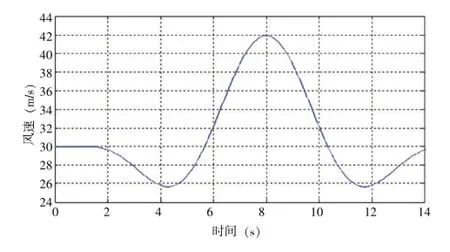
图2 轮毂中心高度水平风速
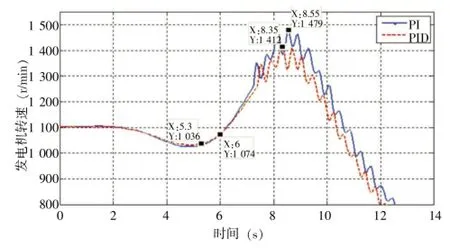
图3 发电机转速
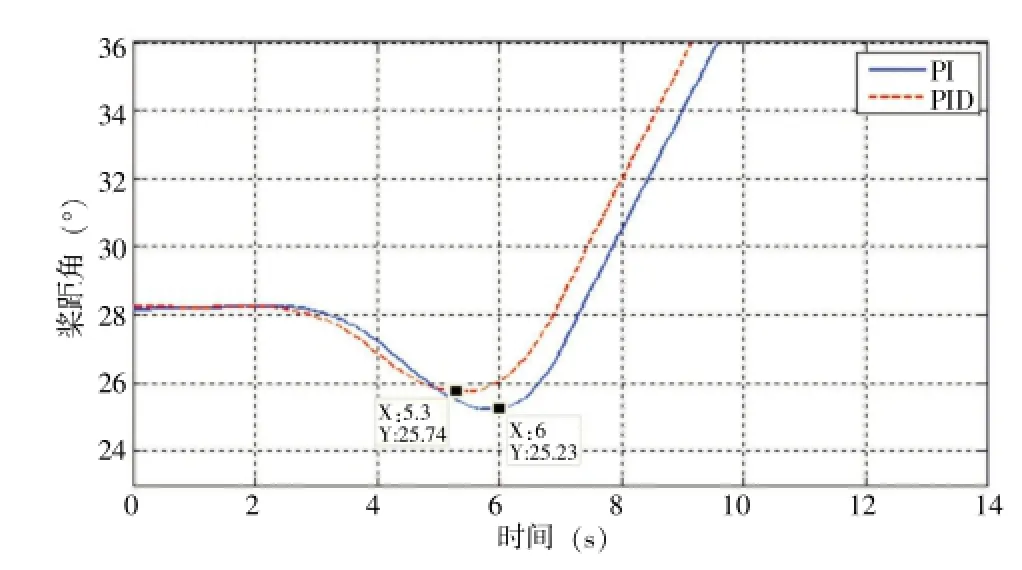
图4 桨距角
从图3和图4可以发现,变桨距PI控制策略,发电机转速回升到1 074 r/min时 (额定转速为1 100 r/min),桨距角才停止开桨、准备收桨,但此时风速急速上升,因此造成发电机超速严重而停机,并且导致叶片和塔筒等关键部位出现较大的极限载荷。而变桨距PID控制策略,在发电机转速回升到1 036 r/min时,桨距角停止开桨、准备收桨,从而与PI控制策略相比提前收桨,减轻了超速情况和降低了风机的极限载荷水平,如图5~图7所示。

图5 叶根挥舞方向扭矩
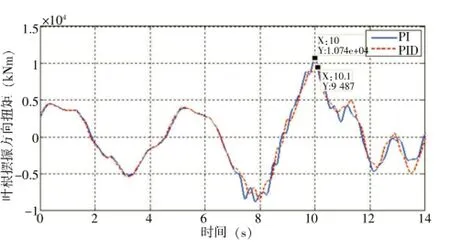
图6 叶根摆振方向扭矩

图7 塔筒顶部Myz扭矩
3.2 ECG风模型分析
此工况是模拟风机遭遇极端相干阵风 (ECG)的极限载荷情况,因风速变化极端恶劣,一般会导致快速停机或安全链停机,风机的极限载荷较大,本次仿真的具体工况说明详见表2。

表2 ECG工况信息说明

图8 轮毂中心高度水平风速
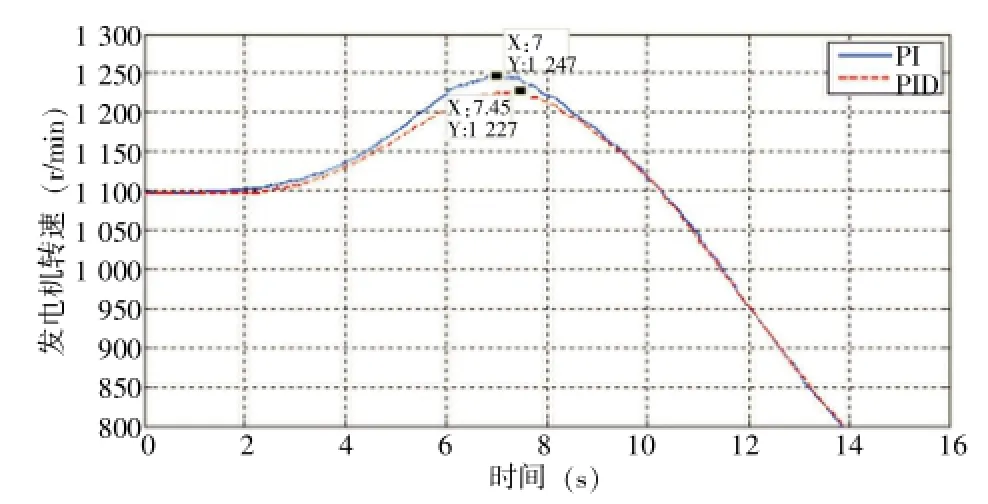
图9 发电机转速
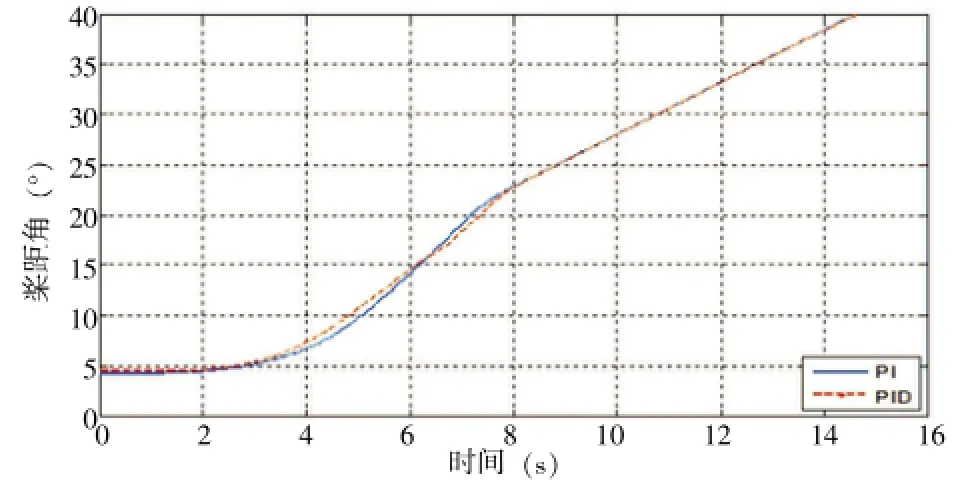
图10 桨距角
从图8可见,风速幅值是一个急剧上升的过程,但叶片存在较大的惯性而导致收桨滞后,最终导致严重的超速现象且风机的极限载荷较大。若加入超前环节微分项 (D),相比PI控制器可以一定程度地补偿变桨滞后性,尽快收桨减小超速值,如图9和图10所示,从而减小了风机的极限载荷,如叶根挥舞方向、塔筒顶部Myz等,如图11~图13所示。

图11 叶根挥舞方向扭矩

图12 叶根摆振方向扭矩

图13 塔筒顶部Myz扭矩
3.3 NTM风模型分析
此工况是模拟风电机组正常发电运行的一般工况,其风速变化属于正常情况 (如图14所示),风电机组实际现场运行多处于此工况。因此,此工况一般不允许发生故障而停机,尽量保持转速、功率以及机组振动情况稳定,本次仿真的具体工况说明详见表3。

图14 轮毂中心高度水平风速
从发电机转速和齿轮箱扭矩的功率谱密度来看,两者的控制效果基本一致,如图15和图16所示。但从塔筒振动情况上看,特别是塔筒一阶频率附近的振动情况得到了改善。塔筒前后方向加速度功率谱密度中 (如图17所示),塔筒一阶的幅值从0.1448降到0.08508。塔筒左右方向加速度功率谱密度分析中 (如图18所示),塔筒一阶的幅值从0.1716降到0.1005。说明PID控制器相比PI控制器,不仅保持了风轮转速和齿轮箱扭矩的稳定,还减轻了塔筒的振动情况。FD140的理论模态频率见表4。

表3 NTM工况信息说明

表4 FD140理论模态频率说明
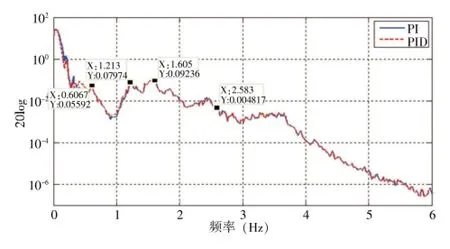
图15 发电机转速功率谱密度
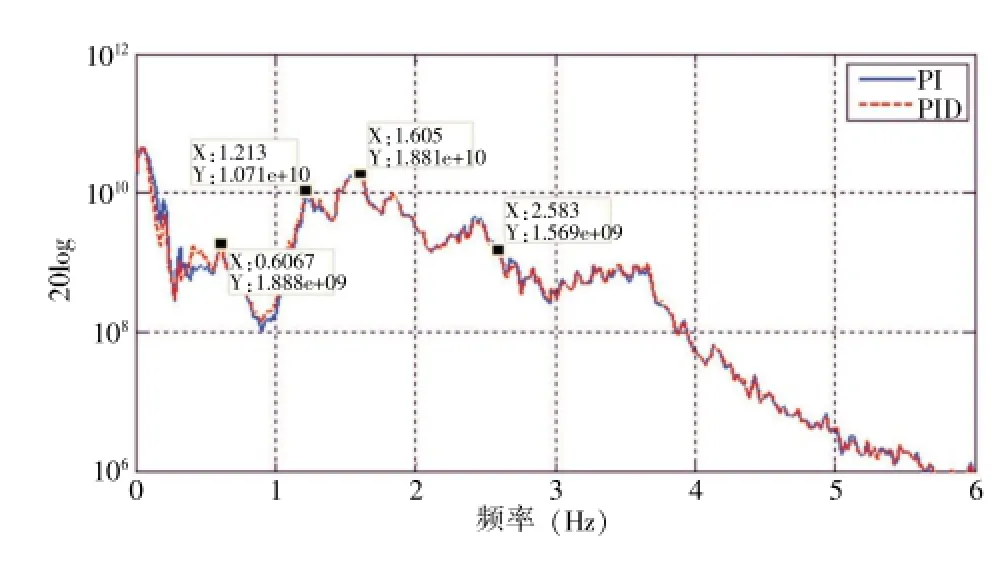
图16 齿轮箱扭矩功率谱密度

图17 塔筒前后方向加速度功率谱密度

图18 塔筒左右方向加速度功率谱密度
4 极限载荷对比分析
为了全面检验PID控制器的性能,依据GL 2005海上风机设计标准设计极限载荷工况,运用两种控制器进行了完整的极限载荷计算及后处理,对关键部位的主要载荷指标进行了对比,其中比较的数值是该项的最大绝对值,如表5所示。极限载荷的对比表明,PID控制器优于PI控制器,前者降低了机组的极限载荷水平,即在保证安全性的基础上降低了机组成本。
5 结论
本文针对大型海上风机的叶片惯性或滞后性较大的问题,分析了传统变桨距PI控制器的不足,主要表现为受到大型叶片的滞后性的影响,而导致超速严重及风机极限载荷偏大等问题,因此设计了带有超前环节的PID控制器,并对两种控制器分别进行了典型工况和完整极限载荷工况的分析计算,其结果表明PID控制器相比PI控制器,不仅具有稳定风轮转速、减轻风机振动的优点,还降低了风机的极限载荷,从而在保证安全性的基础上降低了机组成本。

表5 控制器极限载荷对比结果
[1]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2011
[2]T.Burton,D.Sharpe,N.Jenkins,E.Bossanyi.W ind Energy Handbook[M].John W iley,2008
[3]邢钢,郭威.风力发电机组变桨距控制方法研究[J].农业工程学报.2008,24(5):181-186
[4]Abdulhamed Hw as,Reza Katebi.W ind Turbine Control Using PIPitch Angle Controller[C].IFAC Conference on Advances in PID Control,March 28-30,2012,Brescia, Romania Italy:407-412
Design of Variable Pitch PID Control for Large Scale Offshore W ind Turbine
Li Yongming,Song Juzhong,Yin Jingxun,Wang Qijun,Lin Zhiming
(Dongfang Turbine Co.,Ltd.,Deyang Sichuan,618000)
Aiming at the blade with greater inertia of largescale offshore wind turbine,the paper analysed disadvantages of PI controller,the variable pitch PID logical controlmethod applied in the largescale offshore wind turbine was proposed.In comparison with PI controller,PID controller with the lead link had advantages for compensating the lag of pitch system.The simulation result proved that PID controller had better performances than that of PI controller,such as the better stability of rotor speed,vibration mitigation and extreme load reduction,so the costwas reduced.
variable pitch,PID,offshorewind turbine
TP273
:A
:1674-9987(2014)03-0048-07
国家国际科技合作专项资助:5MW海上风机联合研发 (项目编号:2010DFB70710)。
李永明(1984-),男,硕士研究生,助理工程师,2011年毕业于太原理工大学控制理论与控制工程专业,主要从事风电机组控制算法的设计开发工作。