教学用四层电梯模型机PLC控制系统的设计与实现*
2014-02-07王志刚
王志刚
(中山火炬职业技术学院,广东中山 528436)
0 引言
中国电梯行业业内的2012年统计数据显示,全国电梯从业人员的缺口在50万以上,严重时多达百万,而且从业人员整体素质低下,无证上岗现象严重。为了提高电梯的安全性、可靠性,满足广大电梯企业对安装、维保人员的市场需求,解决从业人员专业技术水平及业务能力低下、人员匮乏的现状,进而培养出高素质的电梯从业工程技术人才,我们开发了教学用四层电梯模型机。
开发本电梯模型机的目的基于以下几点:
(1)实现教学用四层电梯模型机的自动化控制;
(2)掌握PLC控制系统的软硬件设计以及调试的方法;
(3)促使学生理论与实践深度融合,提高学生的动手操作能力。
1 控制系统的硬件设计
1.1 模型机的组成
电梯模型机主要包括机房、控制柜、井道、厅门及轿厢五个部分[1-2]。
(1)控制柜部分由总电源、PLC、控制电源、变频器等组成;
(2)机房部分由电磁制动器、曳引机、限速器等组成;
(3)轿厢部分由轿厢、导靴、安全钳、平层装置、轿厢内指导灯、轿厢照明等组成。
(4)井道部分由导轨、缓冲器、限速器、极限开关、平层感应器、限速器等组成;
(5)厅门部分由厅门、上下呼按钮、楼层显示装置等组成。
整个模型机安置在面积为40 cm×30 cm的底板上,电气控制部分安装在控制柜内,电梯模型机的各项性能指标通过PLC来实现,其重量约为50 kg,高度约为150 cm。
1.2 模型机主要功能介绍
模型机可实现的主要功能如下[1]:
(1)确定电梯上行或下行的运行方向;
(2)记忆并响应上行或下行的呼梯信号;
(3)顺向呼梯信号优先响应,到达指定楼层后,呼梯信号解除;
(4)电梯到达所指定的楼层时,所在楼层的指示灯将闪烁3 s,梯门处于开启状态;
(5)不仅具有上限位及下限位保护功能,还具有互锁功能,使电梯运行平稳、高效;
(6)可以显示呼梯信号及电梯所处楼层。
电梯模型机采用常使用的曳引式电梯结构。其滑轮组由两个动滑轮和一个定滑轮组成,可以减小所需的牵引力,拖动电机为电压为AC380V、功率为120 W。其结构与实际电梯基本相同,其功能与实际电梯的基本一致。模型机的大部分部件均是采用透明材料制成,这就有利于观察电梯的内部结构,运行过程中的每一个动作看起来都非常直观;可以很直观地了解并掌握电梯的基本结构、动作原理[2-4]。
1.3 I/O分配
模型机选用三菱FX2n-64MR作为电梯的控制单元,其输入点数与输出点数均为32个。模型机具有上限开关、下限开关、开门限位、关门限位、上下呼梯等25个输入信号;抱闸继电器、开门继电器、关门继电器、楼层指示灯、牵引电机正转及反转等23个输出信号。输入点分配详情见表1,输出点分配详情见表2。
2 控制系统软件设计
PLC电梯控制系统的关键环节软件设计部分。在进行软件设计时,要本着功能完善、程序设计简单、易读、易改的原则[4-6]。利用PLC的各种指令进一步优化编写的程序,尽可能缩短控制系统程序扫描时间,进而保证电梯运行精度。控制系统设计流程图详情见图1。
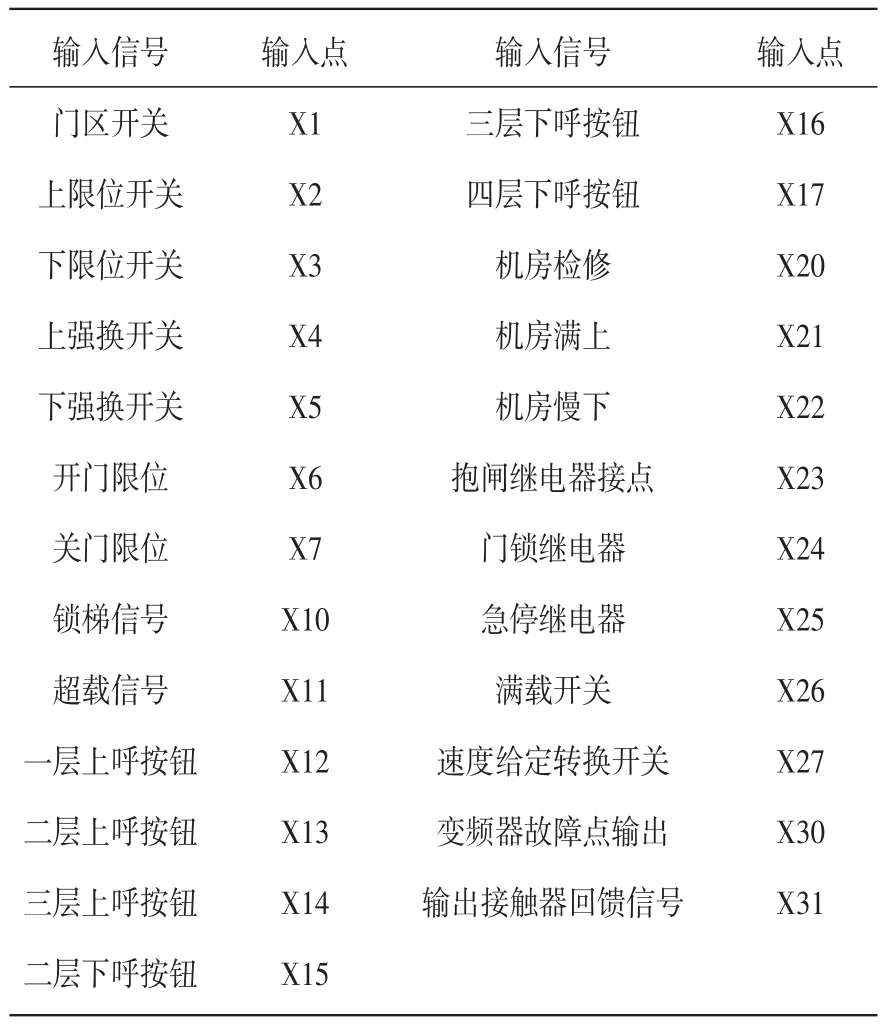
表1 输入点分配表

表2 输出点分配表
根据电梯的控制要求,电梯总是按照一定的程序重复地进行上下行、开关门动作。其过程为:给出上呼或下呼信号,判断电梯运行方向,启动运行,到达层站时执行开门、关门。其工作原理图详情见图2,根据电梯模型控制系统的功能,进而编制出满足模型机相关功能的梯形图。
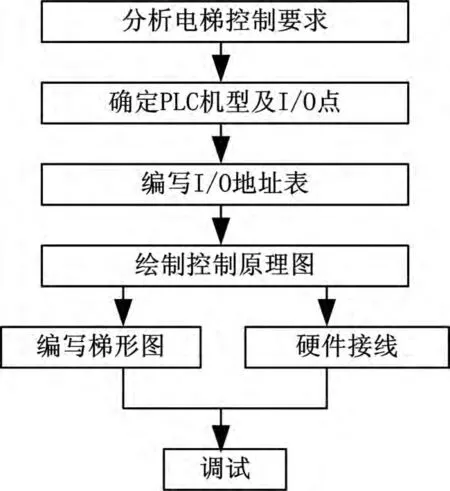
图1 设计流程图
3 模型机的工作过程
模型机的轿箱通过交流电机来拖动,交流电机的额定电压为380 V。电梯轿箱的上升与下降分别用Y30及Y31来控制。在PLC编程时,Y30与Y31进行互锁,是为了防止意外而造成电源短路。
模型机控制系统作为一个人机交互式的系统,在运行过程中存在很多不确定因素。这就需要在能够实现电梯的基本控制功能的基础上,根据不确定的输入信号以及电梯所处于的状态控制电梯的运行。当控制系统工作时,PLC根据接收到轿厢和厅门控制系统的功能信号、楼层的呼叫信号以及井道与变频器的状态信号,经过程序的判断、运算,进而实现电梯运行的控制。PLC根据控制系统的要求,向变频器发出上行下行信号、启动信号、加/减速运行信号以及制动停梯信号。由变频器按照一定的控制规律、控制算法进而来控制电机,进而完成电梯的工作全过程[4-7]。

图2 模型机的工作原理图
4 控制系统的调试及运行情况
4.1 控制系统的调试
针对一个PLC控制系统,首先要对其功能进行设计,就是根据被控对象工艺要求,明确控制系统需要完成什么样的工作,完成工作需要什么样的条件。其次,要对PLC控制系统进行功能分析,进而提出PLC控制系统的规模、结构形式、I/O点数、控制信号的种类等。最后根据控制系统的分析结果,确定PLC控制系统所需要的机型以及系统的具体配置[5-8]。
调试步骤:
(1)在总装调试前,用户要把编写的程序进行模拟调试,模拟调试无误后,把PLC接到控制系统里进行总装调试;
(2)PLC的外部硬件接线检查,确保接线正确;
(3)将模拟调好的用户程序下载到用户存储器中进行调试,确保PLC控制系统各部分的功能均达到既定的要求,并能协调一致,成为一个完整PLC控制系统;
(4)如果调试结果达不到控制系统的要求,可通过调整硬件以及软件的方法进行优化;
(5)调试完成后,将程序固化在EPROM内。
4.2 控制系统的运行情况
(1)按下呼叫按钮,PLC检测到上呼信号或下呼信号以后,便会控制轿厢运行到所指定楼层。电梯上升过程中,PLC只执行上行信号,不执行下行信号,并且只保持上行指示灯点亮,反之亦然。
(2)如果同时按下多层反向外呼信号按钮,则轿厢将优先运行到最远端发出的反向外呼信号所在的楼层,然后再按顺序执行其他楼层发出的外呼信号。
(3)轿厢平层后开门,延时5 s后自动关门。
(4)在上升或下降过程中,开门、关门按钮将处于无效状态。在开门、关门以及5 s延时时间内,轿厢即不能上升也不能下降。
(5)轿厢当前所在的楼层用七段数码管显示,上行与下行用指示灯来指示。
(6)经过验证,模型机运行情况良好、达到预期效果。
5 结语
此教学用四层电梯模型机具有效果直观,可操作性强等优点,选用功能较强的PLC作为模型机的控制单元,符合我国当前中低速电梯控制系统的实际情况,非常适合电梯从业人员岗前培训,也可以满足高职院校教、学、做一体化的教学模式。由于所具有的功能与现实生活中所使用的电梯基本一致,工作人员可以不在施工现场,而提前编制出符合要求的控制程序,进而提高电梯调试效率。模型机可以在不同的方式下运行,实现电梯的相关功能,克服了传统的教学模型功能单一、仅能够以演示为主的局限性,为教学和科研提供了优质的实验平台,具有一定的实用价值与推广价值。
[1]史先传.基于PLC控制的小型电梯模型的研制[J].微计算机信息,2008(13):59-61.
[2]刘明.四层电梯教学模型PLC控制系统的设计[J].中小企业管理与科技,2009(03):165-166.
[3]潘先荣.基于S7-200PLC控制的四层电梯模型设计[J].工业控制计算机,2013(01):95-97.
[4]魏佳,闫挺.6层电梯模型控制系统的PLC设计与调试[J].科技信息,2011(22):240-241.
[5]王宏,王子成,崔光照.基于组态软件的PLC电梯控制和仿真研究[J].制造业自动化,2013(02):109-112.
[6]杨小林,潘丽萍.电梯模型在可编程控制器实践教学中的应用[J].实验室研究与探索,2013(02):45-48.
[7]陈钢.使用PLC测试软件进行PLC电梯程序错误分析[J].可编程控制器与工厂自动化,2011(10):51-54.
[8]石云.基于PLC的电梯控制系统的设计与实现[J].工业控制计算机,2009(04):5-6.