机载传感器无引导搜索策略研究*
2014-01-26吴必富
吴必富
(中国西南电子技术研究所,成都 610036)
机载传感器无引导搜索策略研究*
吴必富**
(中国西南电子技术研究所,成都 610036)
针对机载传感器搜索任务,将无引导搜索问题分为搜索区域目标出现概率未知和已知两种情况进行了讨论。在搜索区域仅有一个目标和忽略传感器搜索视场切换的前提假设下,在搜索时间最短的要求下,提出了一种最优搜索策略,即任一视场的搜索次数与该视场中目标出现概率的平方根成正比。并通过仿真实例表现了该搜索策略:未知目标出现概率的情况下是一种顺序搜索,而已知目标出现概率的情况下是优先、多次搜索目标出现概率较大视场的同时,还无遗漏的兼顾搜索其他视场。该策略使传感器尽快满足任务要求,缩减工作时间。
机载传感器;无引导搜索;顺序搜索;最优搜索策略
1 引言
战斗机在战场环境中主要面临两类搜索任务:引导搜索和无引导搜索。引导搜索情况下,外部信息提示目标可能存在的位置,传感器根据该位置信息设置小范围的搜索空间,达到尽快发现目标的目的。Lu[1]等人针对相控阵雷达讨论了引导搜索情况下的搜索策略,通过在空间上编排搜索波位的次序,以尽快发现目标。无引导搜索情况下,未知目标的位置,就需要传感器对某个大区域进行搜索。周颖[2]等人针对相控阵雷达讨论了无引导搜索情况下的搜索策略。由于未知区域中目标的情况,他们假设了目标在搜索区域中出现的概率分布是均匀分布,最后得出了搜索波位按顺序搜索的策略。同样针对相控阵雷达,Wirth[3]、Fleskes[4]对目标出现概率分布是已知的情况下研究了搜索策略的问题。这些搜索策略的共同点是以每个波位为空间的划分,通过调度波位搜索次序的方法,以尽快满足任务要求,减少传感器工作时间。
机载其他传感器,如光电传感器,同样可以按照其单次视场(FOV)将大范围的搜索区域(FOR)进行划分,通过合理安排搜索视场次序的策略,尽快发现目标。因此,本文针对机载一般搜索传感器,将单次工作范围称为视场,将需要搜索的大范围称为搜索区域。搜索区域划分为多个视场,在传感器为雷达情况下,搜索区域划分为多个波位;传感器为光电的情况下,搜索区域划分为多个视场。
机载传感器无引导搜索策略,研究在没有外来目标引导信息的情况下,传感器采用何种搜索方式对指定区域进行搜索,使发现时间最短。没有目标引导信息时,不知道目标的可能位置,就不能像引导搜索那样设置小范围搜索,而需要对整个区域进行搜索。基于前面的讨论,可将该问题分为区域未知概率分布和已知概率分布两种情况。搜索区域未知概率分布的情况,可假设目标在搜索区域内服从均匀分布,属于狭义无引导搜索;搜索区域目标已知服从某种概率分布,属于广义无引导搜索。本文进一步基于传感器单次搜索视场,将搜索区域划分为多个视场组成,在搜索区域未知概率分布和已知概率分布两种情况下,通过编排传感器搜索视场次序,达到尽快发现目标的目的。
针对无引导搜索问题的经典方法有搜索论法、马尔科夫链预测法、最优控制法、动态规划法、信息熵法、对策论等。Koopman[5-6]提出搜索论法,主要对单次瞬时搜索概率进行了研究;Wasburn[7]提出了针对单次瞬时搜索概率的上界表达式;Stone[8]对多次相互独立的搜索建立平均搜索概率。搜索论法的发展,经历了算法、仿真、动态结合等,并出现了许多与之相结合的混合方法[9-11]。大部分搜索论法的相关文献建立搜索模型的目标函数,包括使得成功搜索概率最大、搜索时间最小、搜索成本最小等。
本文的研究基于机载单传感器,假定搜索区域内仅有一个目标情况下的广义和狭义无引导优化搜索问题进行了研究;并给出了研究结论。为了简化模型和计算,本研究不考虑搜索传感器视场之间的转换时间。
2 搜索区域目标未知分布情况
搜索区域目标未知分布情况下,可以假设服从均匀分布。Gordon[12]等人对均匀概率分布情况下的搜索问题进行了研究,给出了一些相关搜索策略。搜索区域FOR可以由传感器的N个视场FOV组成,也就是将搜索区域划分为N个子区域,由于在搜索区域中目标出现的概率为均匀分布,那么每个子区域中目标出现的概率为1/N。当传感器检测第k个视场时,未发现目标的概率可以表示为两部分:目标不在视场范围内的概率和目标在视场范围内但是未检测到的概率:

显然,在搜索区域目标出现概率均匀分布的情况下,顺序搜索方式平均搜索的视场个数较少。因此,顺序搜索方式比随机搜索方式更优。
3 搜索区域目标已知分布情况
搜索区域中目标出现的概率已知,是非均匀分布。假设第k个视场中目标出现的概率为Pe(k),那么传感器检测第k个视场,未发现目标的概率为
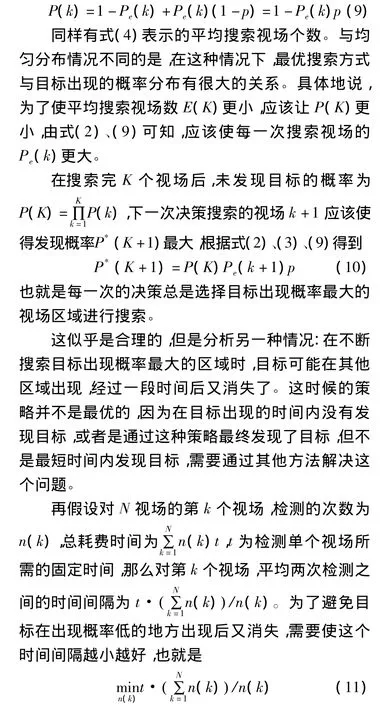
要使式(11)最小,需要对每个视场检测时间间隔都要最小。容易想到最优策略是让每个视场检测的次数都相等,这等价于按某种顺序对整个区域搜索,与均匀分布情况的最优搜索策略结论相同。
进一步考虑在检测时间间隔中的目标出现时间与目标出现的概率相关。也就是对第k个视场,两次检测间隔中,目标可能出现的时间为
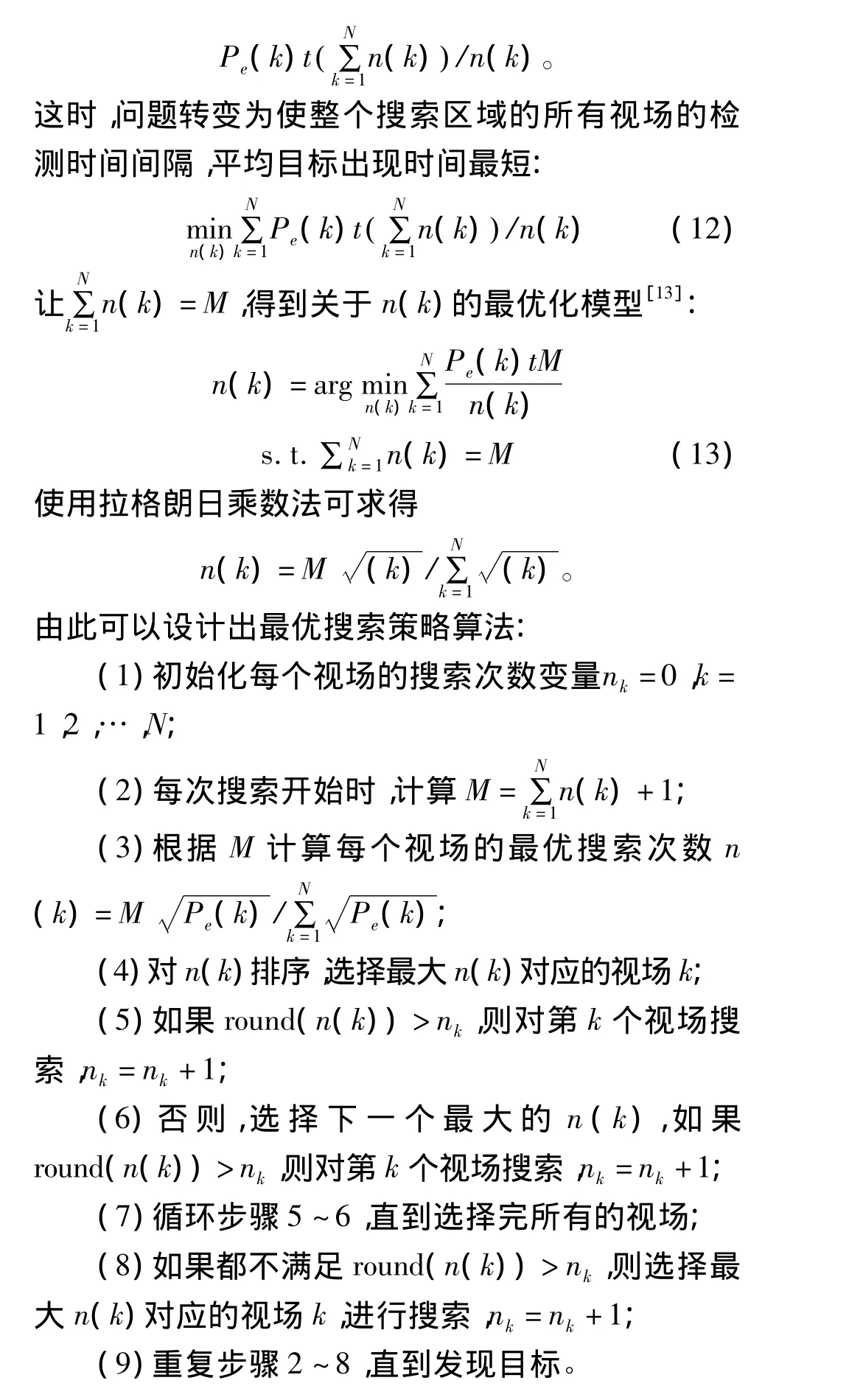
4 仿真实验
基于机载雷达、红外等定向传感器类的无引导搜索问题,设置仿真场景。搜索区域由多个视场组成,在每个视场范围内,具有相应的目标出现概率。根据上文的搜索策略算法,决定每个视场的搜索次序。如表1所示,4个视场组合成的搜索区域,每个视场中目标出现的概率不同(第一行)。表的第一列显示搜索的顺序或次数。每次搜索时,计算的n(k)填于表中,根据本文算法决策每次搜索的视场用加粗字体表示。从表中可以看出,本算法解决了在已知目标出现概率的情况下,只针对概率最大的视场区域进行反复搜索的问题。同时也可以看出,对目标出现概率较大的区域优先搜索,且搜索次数较多。
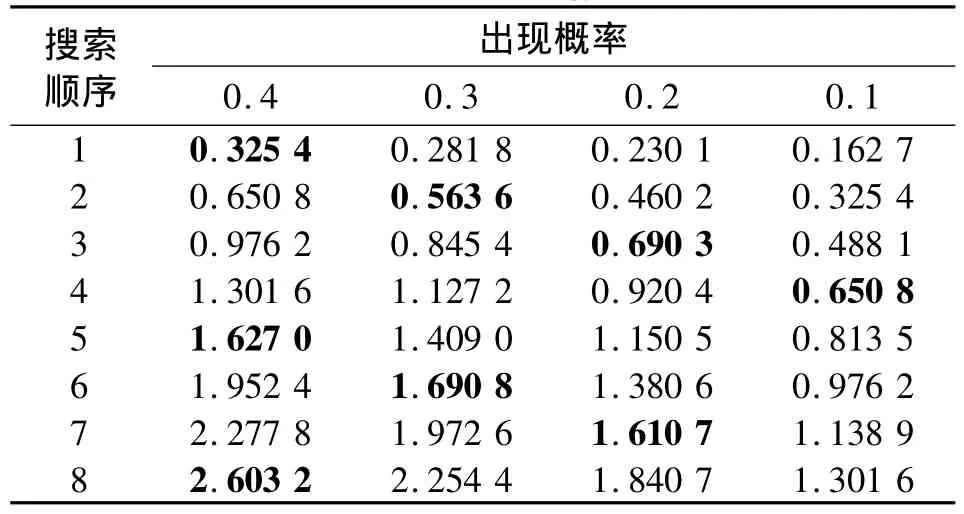
表1 传感器对4个视场的搜索策略Table 1 Sensor search strategy for four FOVs
表2中显示了7个视场组成的搜索区域,其中有3个视场中目标出现的概率相等,但与其他视场中目标出现的概率不等。根据本文算法每次搜索决策的视场用加粗字体显示。可以发现该策略在优先、多次搜索目标出现概率较大视场的同时,还无遗漏地兼顾搜索了其他视场。而对于目标出现概率相同的视场,表现出的是顺序搜索的方式,这正好符合均匀分布情况下的最优策略。
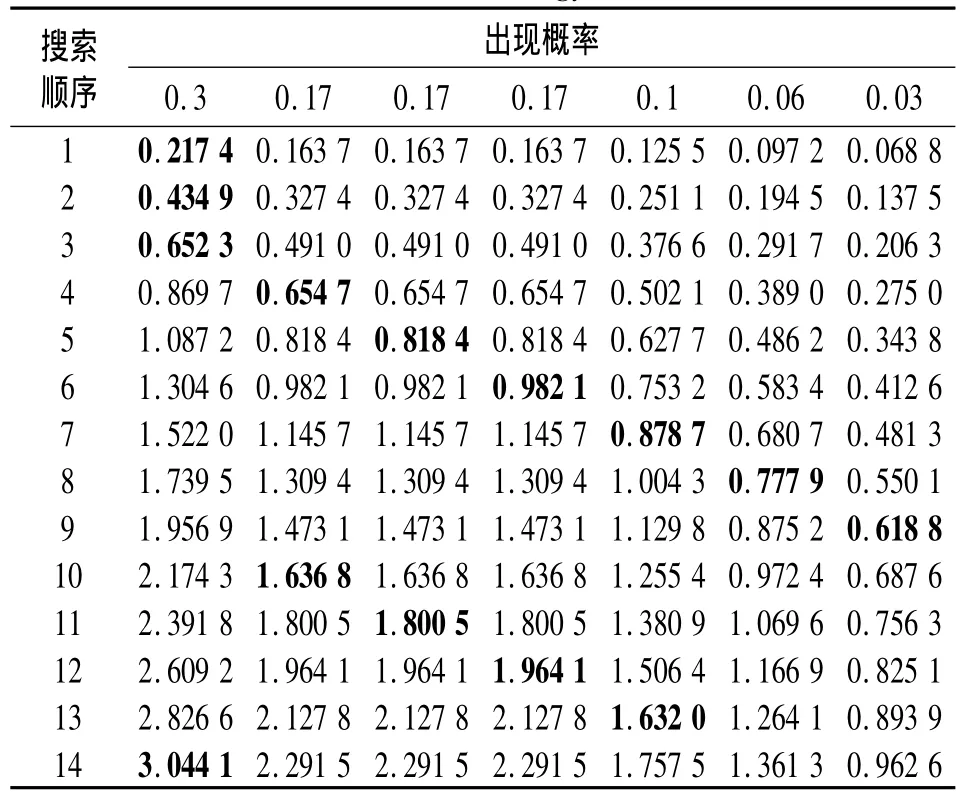
表2 传感器对7个视场的搜索策略Table 2 Sensor search strategy for seven FOVs
从以上仿真结果可以总结出,无论搜索区域目标出现概率是未知还是已知,基于目标出现概率的无引导单传感器搜索策略都适用本文提出的算法,即有效的最优搜索策略是使得每个视场的平均搜索时间间隔最短,每个视场的搜索次数与该视场中目标出现概率的平方根成正比。
5 结束语
本文对机载传感器搜索任务中的无引导搜索问题进行了分析,在仅有一个目标出现在其中一个视场中和忽略搜索视场之间的切换代价的前提假设下,针对搜索区域目标出现分为未知概率分布和已知概率分布两种情况分别进行了研究,在搜索时间最短的要求下,提出了一种最优搜索策略的算法。分析表明,在未知目标出现概率的情况下是一种顺序搜索,而已知目标出现概率的情况下是优先、多次搜索目标出现概率较大视场的同时,还无遗漏地兼顾搜索其他视场。该算法对工程应用具有一定的参考意义。
[1]Lu Jianbin,Hu Weidong,Yu Wenxian.Phased array radar cued search strategy based on information gain [J].Journal of System Engineering and Electronics,2008,19(2):292-297.
[2]周颖,王雪松,王国玉,等.相控阵雷达最优搜索随机规划研究[J].现代雷达,2005,27(4):60 -63.
ZHOU Ying,WANG Xue - song,WANG Guo - yu,et al.Probabilistic Programming of Optimal Search Strategy[J].Morden Radar,2005,27(4):60 -63.(in Chinese)
[3]Wirth W D.Fast and efficient target search with phased array radars[C]//Proceedings of 1975 IEEE International Radar Conference.Arlington,USA:IEEE,1975:198 -203.
[4]Fleskes W.On Search Strategies of Phased Array Radars[C]//Proceedings of IEE Publication International Conference on Radar.[S.l.]:IEEE,1982:12 -14.
[5]Koopman B O.Search and Screening[M].[S.l.]:Center for Naval Analysis,1956.
[6]Koopman B O.The Theory of Search[M].[S.l.]:Operation Research,1956.
[7]Washburn A R.Search for a Moving Target:Upper Bound on Detection Probability[R]//AD - A063219.Monterey,CA:Naval Postgraduate School,1978:1 -17.
[8]Stone L D.Theory of Optimal Search[M].New York:Academic Press,1975.
[9]Ohsumi A.Algorithm for Optimal Searching and Control Systems for a MarkovianTarget[M]//Proceedings of 1989 Control and Dynamic Systems Conference.SanDiego,CA:Academic Press,1989:99 -118.
[10]Mangel M.Search for a Randomly Moving Object[J].SIAM Journal of Apllied Mathematics,1981,40(3):327-338.
[11]褚衍杰,徐正国.基于行为规律的搜索资源分配新算法[J].电讯技术,2014,54(2):195-200.
CHU Yan-jie,XU Zheng-guo.A NewAlgorithm for Allocation of Search Resources Based on Behavior Rule[J].Telecommunication Engineering,2014,54(2):195-200.(in Chinese)
[12]Gordon E S.Rotman S R.Search Strategy and Target Acquisition Performance[C]//Proceedings of the 8th Meeting on Optical Engineering in Israel.Tel Aviv:SPIE,1992:93 -101.
[13]Wang R.Nickerson J V.Search Strategy Optimization for Intruder Detection[J].IEEE Sensors Journal,2007,7(3):315-316.
Study on Uncued Search Strategy for Airborne Sensor
WU Bi-fu
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
For the airborne sensor search assignment,the problem of uncued search is discussed according to two cases which are based on the spatial unknown and known probability of target available in the search area.Under the assumptions that there is only one target available and the switching time between fieldof- views is ignored,and under the shortest time requirement,an optimal search strategy that the number of scans for any field-of-view is proportional to the square root of its probability is proposed.The simulated results demonstrate the strategy for these two cases.It is a sequential search on the unknown probability of target available,and when the probability is known,it will lay more emphasis on the field-of-view bearing larger probability but it will still search without missing any of the other field-of-views.This strategy makes the sensor achieve assignment quickly and reduce operating time.
airborne sensor;uncued search;sequential search;optimal search strategy
TN97;TP391
A
1001-893X(2014)05-0574-04
10.3969/j.issn.1001 -893x.2014.05.009
吴必富.机载传感器无引导搜索策略研究[J].电讯技术,2014,54(5):574 -577.[WU Bi-fu.Study on Uncued Search Strategy for Airborne Sensor[J].Telecommunication Engineering,2014,54(5):574 -577.]
2014-04-04;
2014-05-19
date:2014-04-04;Revised date:2014-05-19
**
wubifu_2002@163.com Corresponding author:wubifu_2002@163.com

吴必富(1969—),男,贵州松桃人,1991年于四川大学数学系获学士学位,现为高级工程师,主要研究方向为信息融合、传感器管理。
WU Bi-fu was born in Songtao,Guizhou Province,in 1969.He received the B.S.degree in 1991.He is now a senior engineer.His research direction is information fusion and sensor management.
Email:wubifu_2002@163.com