基于交通视频的运动车辆检测方法
2014-01-25马卫强
马卫强
(吉林铁道职业技术学院实训与教育技术中心,吉林吉林 132002)
基于交通视频的运动车辆检测方法
马卫强
(吉林铁道职业技术学院实训与教育技术中心,吉林吉林 132002)
为解决交通测试系统中车辆实时跟踪和分割的问题,以数字图像处理方法为手段,针对采集到的交通路况信息,重点研究了背景差分算法提取运动车辆,并提出了一种计算量较小的自适应背景更新算法;采用一种工作在HSV(Hue,Saturation,Valve)空间非基于模型的车辆阴影检测算法,并提出设置阈值参数的方法,在去除车辆阴影的同时也滤除了行人、自行车及摩托车等干扰;针对车辆阴影检测后的二值化图像,采用适合的形态学方法进行后期处理。对实际交通环境下的大量视频和图像进行测试的结果表明,该方法可以有效地实现运动车辆的检测。
车辆检测;背景差分;背景更新;车辆阴影
0 引言
智能交通检测系统[1]通过对交通信息的实时采集、传输和处理,综合了各种科技手段和先进设备,建立一种实时、准确、高效的综合运输管理体系,可以实现对各种交通问题的协调和解决,提高交通效率,保证交通安全,从而实现交通运输的集约式发展,最终达到交通管理与服务智能化的目的。然而,无论多么先进的交通检测系统,都必须建立在对交通目标的正确检测的基础上。因此,交通视频中运动车辆检测技术已成为研究的焦点,而这些数据也是交通管理部门做好交通规划、制订交通政策的重要依据[2]。
国外的很多学者已经开始对视频交通检测系统方向进行了研究。Dickinson等[3]通过研究,证明了运用图像处理技术实现基于视频的车辆信息检测的可实现性。Takab[4]提出处理样本点的方法检测车辆,通过在车道中选取特定的样本点,并在样本点上取图像帧差,通过检测样本点的状态变化检测车辆是否出现。Abramzuk[5]在检测线上应用图像帧差的方法检测车辆信息。Dagless[6]应用图像帧差方法处理复杂路口的多车道车辆统计、车辆跟踪和车速检测,研究了减少灯光变化对运动检测的影响和确保运动检测可靠的图像帧差方法。Fathy等[7]在由轮廓围成的小区域上应用图像帧差方法,进而提出了排队长度、排队状态、占有率和占有周期检测方法。Malik[8]提出了在同一时刻检测和跟踪多辆车并得到车辆形状信息的方法。
目前,国内外研究者对基于视频的车辆检测技术[9],主要采用的方法是帧差算法、边缘检测算法和背景差算法,具体实现方法是通过采样、开窗、虚拟传感器等方法实现交通流量的检测。但国内现有的交通信息采集设备在交通拥挤时各辆车之间的分割技术方面的研究不足,在背景复杂时车辆的跟踪技术和检测分割方面的研究有待深化。笔者以基于视频的图像处理方法为手段,针对采集到的交通路况信息,采用自适应背景更新算法,通过对视频图像进行处理和分析,检测出道路中的运动车辆,然后对检测到的车辆进行阴影剔除,同时去除行人、自行车和摩托车等的干扰,将汽车分离出来。
1 基于背景更新的运动车辆检测算法
1.1 背景差分算法
算法原理[10]。假设第t帧为当前帧,记为It(x,y),背景图像为Bt(x,y),对输入图像的每个像素,计算其与相应背景图像像素的差

其中Dt(x,y)为差分后的图像。选取适当的阈值Q,若Dt(x,y)的灰度值大于Q,则此像素属于前景图像;否则,判定为背景图像。考虑到背景差分算法容易受到环境因素的影响,必须对背景实现实时化提取,并按照一定的频率进行背景更新,以适应光线和天气变化等因素的变化。
1.2 背景提取算法
对于摄像机固定的视频图像序列,背景是指在相对较长的时间内,场景中无运动物体的相对静止的场景图像。背景图像是非常重要的信息数据,是运动车辆检测算法的基础。车辆交通信息具有很强的空间上的相关性,根据统计学的基础,对多帧的信息进行分析,从而提取背景。目前,最常用的背景提取[11]的方法主要是均值法和中值法。
1 )均值法。在背景提取过程中,可以把运动的车辆看作噪声,之后采用累加后求平均的方法去除噪声。该方法具有结构简单,计算简便的特点,其表达式如下

其中B(x,y)为所提取的背景图像,I(x,y)为连续多帧图像中的一帧,N为平均帧数。在实际应用中,一段时间内,亮度绝对相对的车辆通过某一车道的概率微乎其微,因此,采用均值法提取背景时,背景车道上会出现通过车辆的浅影,影响背景提取的效果。当平均帧数增加时,这种现象会有所改善。
2 )中值法。中值法是在均值法的基础上提出的,在运动目标较少的情况下,针对任意单个像素,背景灰度占用这一像素的时间达到50%,这样在一段时间内,中值便可以近似认为是背景。该算法从统计学的角度统计在一段时间内单个像素点在连续帧图像中的亮度值,对视频序列图像的这一像素点的各个亮度值进行排序,然后取其中值亮度作为这一像素的中值输出值。
3 )实验结果比较及分析。研究中选择一段红灯时的交通视频进行实验,此时前面的几辆车已经停下来。分别对视频的连续50帧、100帧和150帧视频序列图像用均值法和中值法进行背景提取。从图1可以看出,利用均值法处理视频序列图像,当车辆经过的速度较慢时,车道上会出现车辆跑过的浅影,在150帧时影子仍然较为明显。通过实验,均值法要达到300帧以上时,才可以消除黑影,但大大降低了系统的实时性。相比之下,中值法的优势明显,在100帧时就可达到令人较为满意的结果。因此,研究采用中值法进行背景提取,可以使整幅图像亮度较为均匀,实时性良好。
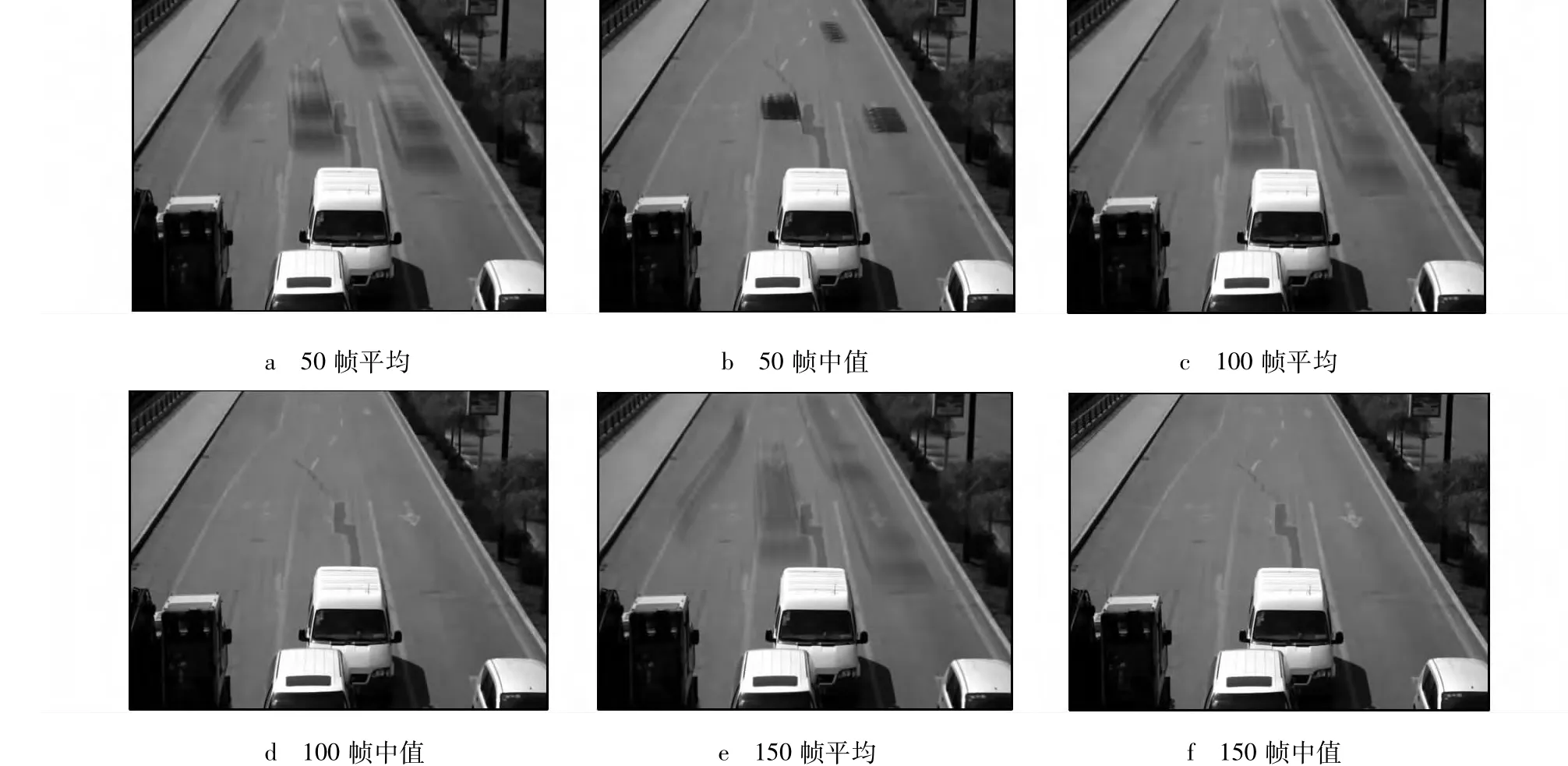
图1 背景提取方法比较实验结果Fig.1 The results of background subtraction algorithm
1.3 自适应背景更新算法
在背景图像提取的基础上,需要采用背景更新方法对背景图像进行实时调整,以提升运动物体的边缘提取效果。研究采用自适应背景更新算法,算法如下。
由图2背景更新实验结果可见,式(5)中的参数α取0.1时效果最好,即在新生成的背景中,大概含有0.9部分的原背景,这也是与事实相符合的。因为背景是渐变的,相邻背景间有很大的相关性。这种背景更新方法简单易行,可以得到比较理想的结果。

图2 背景更新实验结果Fig.2 The results of background updating algorithm
2 车辆阴影检测及剔除算法
在实际的交通视频中,由于光照的影响,阴影的产生是不可避免的。车辆阴影的干扰,对车辆的检测产生较大影响。首先,经过差分后的图像经过处理成为二值图像,视频中的阴影此时可能将车辆连接在一起,导致多辆车误检为一辆车,产生车辆的漏检;其次,摩托车、自行车和行人产生阴影,将其轮廓扩大,这使摩托车、自行车和行人的滤除工作加大了难度,对后续车辆的判别产生影响;此外,车辆阴影与车辆运动特征相似,有可能产生误判。因此,消除阴影是车辆检测的必要环节。
2.1 非基于模型的阴影检测算法
笔者采用非基于模型的阴影检测方法[12],该算法工作在HSV(Hue,Saturation,Valve)空间。这主要是因为HSV颜色空间与人的视觉色彩相对应,而且在这个空间内获取图像中的阴影信息具有更高的精确性。事实上,当背景图像被阴影所覆盖时,图像的色调变化并不大,而饱和度往往低于无阴影覆盖时的图像,可以利用这一特点实现阴影的检测,这种判别方法可描述为
2.2 阈值参数选取方法
通过多次反复实验,阈值参数选取方法是先固定其他参数,改变一个参数的实验方法。对于图3所示的背景差分实验结果,非基于模型的阴影检测算法中阈值参数选取方法如下。
1 ) 固定α =0.01,β=0.35,对τS和τH进行确定。通过多次实验表明(见图4),τS=1,τH=1时,阴影不明显,车辆的轮廓最大,效果最好,重点是确定α和β值。

图3 背景差分实验结果Fig.3 The results of background subtraction algorithm

图4 α=0.01,β=0.35实验结果比较Fig.4 The results comparison with α =0.01,β =0.35
2)固定τS=1,τH=1,实验确定α和β。先固定β=0.75,选定α值。由图5实验结果可以看出,α=0,β=0.75取反后实验结果令人满意,其车辆阴影基本消除,车辆轮廓明显;另外,摩托车也基本消失,其原因在于车道中拍摄到的摩托车、自行车和行人反光面积很小,而正常车辆的反光面积相对很大,这样摩托车等的亮度相对一般车辆很低。α和β确定了图像前景和背景的亮度比值的范围,可以通过选取合适的α和β的值使摩托车等在处理后所得的二值图像中尽量消失。
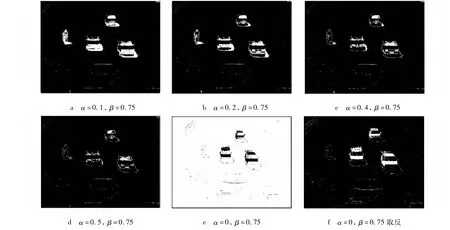
图5 τS=1,τH=1的实验结果比较Fig.5 The results comparison with τS=1,τH=1
3 )通过固定α=0选取合适的β值。由图6实验图像比较可以得出:α=0,β=0.3时,虽车辆轮廓清晰,但阴影仍部分存在,且摩托车的轮廓线消除得不够理想;α=0,β=0.7时,摩托车的轮廓线得到很好的消除,但车辆内部玻璃处出现很大空洞,给后续处理加大了难度;相比之下,α=0,β=0.5时,摩托车轮廓线模糊度适中,可以在后面利用形态学或滤波消除,而且车辆内部得到较好的填充,且阴影都已被消除。
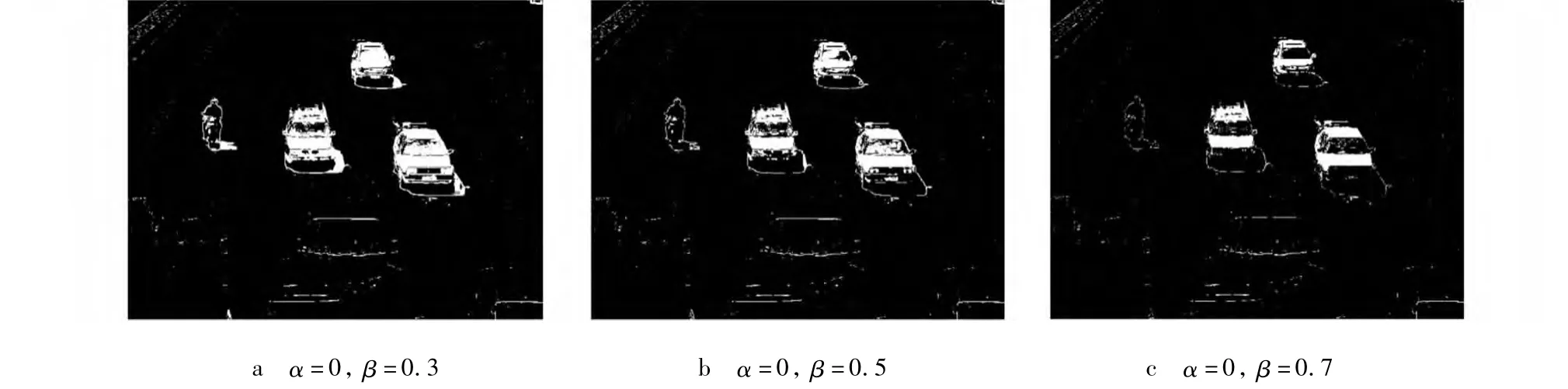
图6 α=0的实验结果比较Fig.6 The results comparison with α =0
最后,选取参数的结果为α=0,β=0.5,τS=1,τH=1。这种工作在HSV空间的算法具有运算简便,易于硬件实现和实时性好的特点,通过改变算法的阈值参数,这种算法适用于不同的环境和光照条件。
3 运动车辆检测结果修正
3.1 基于形态学的车辆结果修正
经过车辆阴影检测及消除摩托车干扰后,所得的二值图像中的车辆目标内部总会或多或少地存在一些空洞,同时又有很多噪声(如摩托车断断续续的轮廓线),这仍然会对下一步的车辆检测产生较大影响。因此要尽可能的消除噪声,填充车辆目标内部空洞,以便得到更加清晰完整的车辆目标。
区域填充是形态学图像处理[13]的一种常见应用,它是指将给定的边界内的所有像素点填充为指定的颜色,以集合运算中的求补、交集和膨胀为基础。在图像处理中,对图像进行的先腐蚀后膨胀的运算称为开运算,它具有消除细小噪点,平滑物体边界和分离物体的作用;相对地,对图像进行的先膨胀后腐蚀的运算称为闭运算,它具有填充物体轮廓内细小空洞,平滑物体边界和连接毗邻物体的作用。
3.2 实验结果及分析
将阴影检测生成的二值图像进行填充、腐蚀、膨胀等一系列形态学处理,从图7实验结果可以看出,通过上述处理,车辆的轮廓虽然有所变化,但对后来的车流量信息检测几乎没有影响,同时可以得到噪声完全去除、摩托车及阴影消失、车辆轮廓清晰且得到完好填充的一幅二值图像,至此,运动车辆被完整地检测出来。

图7 形态学处理结果Fig.7 The result ofmorphological methods processing
4 结语
笔者采用中值法进行初始背景的提取,然后采用自适应背景更新处理背景的实时变化。在此基础上采用一种工作在HSV空间非基于模型的阴影检测方法,对背景差分后的图像进行阴影检测,通过确定合理的参数,使车辆阴影基本消除,车辆轮廓明显,同时,摩托车、行人、自行车等得到滤除。对阴影检测和行人滤除后得到的二值图像进行了一系列的形态学后处理,使噪声完全去除、摩托车及阴影消失、车辆轮廓清晰且得到完好填充。笔者提出的实时有效算法,可以为交通流量信息检测提供重要的依据。对于天气条件恶劣时如何进行车辆检测,阴影检测的参数怎样能够随环境的变化自动的选取等问题将进一步研究。
[1]刘智勇.智能交通控制理论及其应用[M].北京:科学出版社,2003.
LIU Zhiyong.Intelligent Traffic Control Theory and Its Application[M].Beijing:Science Press,2003.
[2]王小鹏,郭莉琼.公路车流量视频检测方法[J].计算机应用,2012,32(6):1585-1588.
WANG Xiaopeng,GUO Liqiong.Video-Based Method for Highway Traffic Flow Detection [J].Journal of Computer Applications,2012,32(6):1585-1588.
[3]DICKINSON K W,WAN C L.Road Traffic Monitoring Using the Trip System [C]∥IEEE 2ndint Conf Road Traffic Monitoring.London:[s.n.],1989:56-60.
[4]TAKABA.Measurement of Traffic Flow Using Real-Time[C]∥Processing of Moving Pictures 32nd Conf on Vehicular Technology.San Diego,CA:[s.n.],1982:488-494.
[5]ABNAMCZUK T.A Microcomputer Based TV Detector for Road Traffic[C]∥Symposium on Road Research Program.Tokyo,Japan:[s.n.],1984.
[6]DAGLESS E L.Image Processing Hardware and Algorithms[C]∥Proc 5th School of Computer Vision and Graphic.Zakopane,Poland:[s.n.],1994:9-34.
[7]FATHY M,SIYALM Y.A Real-Time Image Processing Approach to Measure Traffic Queue Parameters[J].IEEE Proc Vision,Image and Signal Processing,1995,142(5):297-303.
[8]MALIK J.Smart Cars and Smart Roads[C]∥Proc 6th.British Machine Vision Conf.Birmingham,England:[s.n.],1995:367-381.
[9]戴夏强,周大可,鹿乐.基于匹配分布和混合高斯模型的车辆检测算法[J].吉林大学学报:信息科学版,2013,31(5):540-547.
DAIXiaqiang,ZHOU Dake,LU Le.Vehicle Detection Algorithm Based on Distribution of Matching and Gaussian Mixture Model[J].Journal of Jilin University:Information Science Edition,2013,31(5):540-547.
[10]董春利,董育宁.基于视频的车辆检测与跟踪算法综述[J].南京邮电大学学报:自然科学版,2009,29(2):88-94.
DONG Chunli,DONG Yuning.Survey on Based Vehicle Detection and Tracking Algorithms[J].Journalof Nanjing University of Post and Telecommunications:Natural Science,2009,29(2):88-94.
[11]胡佩雯.基于视频的实时交通流检测系统的研究[D].武汉:武汉理工大学自动化学院,2007.
HU Peiwen.Research of Real-Time Detection of Traffic Flow System Based on Video[D].Wuhan:College of Automation,Wuhan University of Technology,2007.
[12]WU Bingfei,JUANG,JHYONG,et al.A New Vehicle Detection Approach in Traffic Jam Conditions[J].Computational Intelligence in Image and Signal Processing,2007(3):1-6.
[13]CUCCHIARA R,GRANA C,NERIG,etal.The Sakbot System for Moving Object Detection and Tracking[J].Video-Based Surveillance Systems-Computer Vision and Distributed Processing,2001,29(8):145-157.
Moving Vehicles Detection Algorithm Based on Transportation Videos
MAWeiqiang
(Training and Educational Technology Center,Railway Vocational and Technology College,Jilin 132002,China)
In order to solve the problems of real-time vehicle tracking and separation in the traffic test system,using digital image processingmethod,amoving vehicles detection algorithm based on transportation videos is proposed.For the obtained traffic test information,the research focuses on the background subtraction algorithm to extractmoving vehicles.A method of adaptive background updating algorithm with smaller amount of calculation is proposed and a nonmodel-based approach working in HSV(Hue,Saturation,Valve)space is used to detect vehicle shadow.Through setting the proper threshold parameters,we can remove vehicle shadow and remove disturbances of pedestrian,bicycle and motorcycle vehicle at the same time.After the shadow detection,some suitablemorphologicalmethods are used for post processing.Based on large number tests of real traffic environment video and images,the proposed method is proved to be effective for moving vehicles detection.
vehicle detection;background subtraction;background updating;vehicle shadow
TP391
A
1671-5896(2014)03-0321-07
2014-01-08
双轨路形计系统研制基金资助项目(3R110X441419)
马卫强(1974— ),男,天津人,吉林铁道职业技术学院副教授,主要从事汽车检测与维修及多媒体技术研究,(Tel)86-13844214441(E-mail)mwq36979@sina.com。
刘东亮)
