基于FPGA 的电子节气门控制器硬件设计与实现
2014-01-25许月亭季冬冬
许月亭,季冬冬,许 芳,陈 虹
(吉林大学a.汽车仿真与控制国家重点实验室;b.通信工程学院,长春 130022)
基于FPGA 的电子节气门控制器硬件设计与实现
许月亭a,b,季冬冬b,许 芳b,陈 虹a,b
(吉林大学a.汽车仿真与控制国家重点实验室;b.通信工程学院,长春 130022)
针对电子节气门控制系统对控制器的快速性、低成本、微型化等控制性能的要求,通过现场可编程门阵列(FPGA:Field Programmable Gate Array)实现控制器的硬件设计,在发展较为成熟的增量式PID(Proportional,Integral,Differential)算法基础上加入积分分离环节,利用高级综合工具Catapult C实现了基于FPGA全硬件方案的积分分离PID控制器。设计制作了AD/DA采集板,实现了基于FPGA的积分分离PID控制器与电子节气门之间的数据通信,并进行了电子节气门的实物跟踪控制实验。实验结果表明,基于FPGA的全硬件积分分离PID控制器实现了电子节气门跟踪控制,提高了控制器的运算精度。
电子节气门控制系统;现场可编程门阵列;硬件实现;积分分离PID;实物实验
0 引 言
电子节气门控制系统的目标是节气门开度能又快又精确且超调尽可能小地达到期望目标位置。节气门是汽车发动机的重要控制部件,采用电子节气门控制系统,使节气门开度得到精确控制,不但可以提高燃油经济性,减少排放,同时,系统响应迅速,可获得满意的操控性能[1]。由于排放法和油耗法规的日益严格以及人们对车辆的安全性和舒适性的更高期望,电子节气门控制系统对控制器的要求也越来越高,如控制器的高实时性、微型化、低成本开发等。因此,对电子节气门控制性能的改进及研究是很有必要的。
目前,国内外许多学者进行电子节气门控制的研究主要分为两方面:控制算法研究和控制硬件实现。在控制算法研究方面,应用许多先进的控制理论方法,提高节气门控制性能,如模糊控制,滑模控制和backstepping方法等;文献[2]利用模糊控制和滑模控制算法,设计了系统控制器,实现了电子节气门的模糊滑模控制。文献[3]根据电子节气门的结构,采用基于滑模控制的非线性控制方法,对电子节气门的经典PID(Proportional,Integral,Differential)控制、变速PID和滑模控制进行了比较,给出了滑模控制法对电子节气门的控制效果。文献[4,5]采用backstepping方法实现了电子节气门的非线性控制器,分析了跟踪误差系统的输入到状态稳定性,并且给出了控制器参数的整定方法。文献[6]对比了基于PID的控制策略、模糊控制以及滑模变结构控制在电子节气门控制系统上的效果,表明滑模变结构控制具有很好的控制性能。以上研究工作还都处于仿真研究阶段,没有将被控对象做到实物以及控制器的硬件加速,节气门模型最终只能在150 ms达到稳定,系统存在超调,并没有从控制器的快速性角度改善控制性能。在控制器硬件实现方面,主要集中在研究快速、高效的硬件实现方法,如单片机实现方案、数字信号处理(DSP:Digital Signal Processor)实现方案,高级精简指令集机器(ARM:Advanced RISCMachine)实现方案,FPGA(Field Programmable Gate Array)实现方案等[7]。文献[8]在单片机上移植RTX51实时操作系统,开发了一整套基于嵌入式实时操作系统的AMT(Automated Mechanical Transmission)控制软件,解决了AMT执行换档动作时电子节气门控制的传统难题。文献[9]设计了基于ARM和μC/OS-Ⅱ嵌入式操作系统的智能电子节气门控制平台。文献[10,11]提出了电子节气门模型预测控制器的片上可编程系统(SOPC:System On a Programmable Chip)实现方案,该方法在FPGA芯片上构建了SOPC系统,设计实现了基于FPGA的电子节气门的MPC控制器。但上述研究在硬件实现过程中基本都是利用C/C++语言编写代码,而C/C++代码在开发板中串行计算,程序执行的过程较为耗时。
针对电子节气门的控制要求,笔者从控制器硬件实现的角度,提出了一种新的电子节气门控制器的FPGA硬件实现方案。该方案利用高级综合工具Catapult C在FPGA芯片上设计实现了电子节气门的全硬件增量式积分分离PID控制器,提高了控制器的运算速度。为实现基于FPGA的积分分离PID控制器与电子节气门之间的数据通信,设计制作了AD/DA采集板,并用硬件描述语言Verilog编写了AD、DA、PWM(PulseWidth Modulation)模块的接口程序,最后进行了电子节气门的实物控制实验。
1 电子节气门控制系统
节气门的作用是控制进入发动机的空气流量。电子节气门是一种柔性连接,通过传感器、控制器以及驱动芯片实现电子节气门开度控制[5],取消了传统节气门与加速踏板之间的机械连接。传统加速踏板采用刚性连接,节气门开度完全取决于加速踏板的位置,而电子节气门的柔性连接能根据驾驶员的需求以及整车各种行驶状况确定节气门的最佳开度,保证车辆最佳的动力性和燃油经济性,提高安全性和乘坐舒适性[12]。
电子节气门控制系统框图如图1所示[13,14]。实际的驾驶员首先控制油门踏板,随即油门踏板位置传感器会产生对应的电压信号作为系统给定输入,然后再将此信号输入节气门控制单元,从而控制单元获得相应的节气门转角期望值,再经过积分分离PID控制器,将计算的占空比信号发送到驱动单元即PWM驱动板驱动电子节气门。节气门位置传感器把节气门的位置开度实时反馈给节气门控制单元,形成闭环位置反馈控制系统。笔者的积分分离PID控制器在FPGA芯片上实现,以满足节气门的跟踪控制要求。
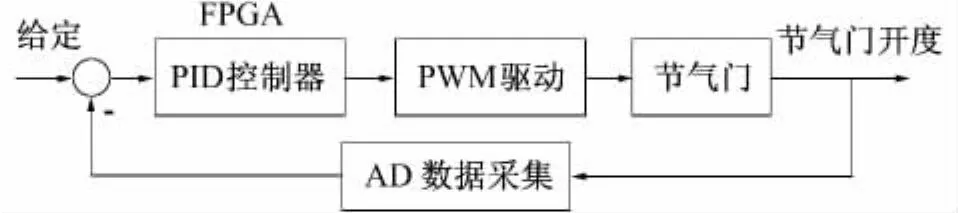
图1 电子节气门实物控制框图Fig.1 Electronic throttle control block diagram
2 积分分离PID算法
PID调节主要根据输入的偏差,按照比例、积分、微分的函数关系运算,运算结果用作输出控制。PID控制是一种较为传统的控制策略,在控制领域被广泛的应用,该算法结构简单易于实现,具有鲁棒性好、可靠性高、参数易于整定等特点[15,16]。
数字PID控制器可分为位置式和增量式两种。笔者采用增量式PID算法。其具体形式为

2.1 积分分离
实际的PID控制系统中,经PID运算得到的控制量存在范围限制,输入偏差较大时很可能引起控制量超过可行阈值,产生饱和。饱和作用主要是由积分环节所引起的,为了避免积分饱和调节滞后,在PID控制系统中适当地加入防止积分饱和的手段是很有必要的。笔者根据积分饱和的特性,分析了参数与系统性能之间的关系,并设计了积分分离的PID增量式控制器,保证了工艺参数平稳快速地达到给定值。
2.2 积分分离PID控制器设计
积分分离的PID控制器的基本设计思想是当输入偏差有较大变化,实际偏差大于一定阈值时,系统不进行积分操作。而当偏差小于一定阈值时,恢复积分调节以消除系统的静态误差。假设e(k)的最大值为e(k)_max(e(k)_max>0),可以在积分项前加入系数

3 控制器的FPGA硬件实现
由于FPGA具有计算能力强、集成度高及设计灵活等优点,笔者利用高级综合工具Catapult C在FPGA芯片上进行电子节气门的积分分离PID控制器的硬件设计。
3.1 FPGA硬件实现方案
Catapult C是Mentor公司开发的一款系统级的FPGA开发软件,支持C描述的测试激励,通过调用ModelSim进行功能仿真,以便验证RTL(Register Transfer Level)代码功能的正确性,提高了系统的计算性能。Catapult C为硬件电路提供延迟时间、吞吐量、时序余量和FPGA的占用面积等情况以及甘特图,方便进行系统优化[18],图2为设计PID控制算法的甘特图。

图2 增量式积分分离PID控制算法的甘特图Fig.2 Incremental integral separation PID control algorithm Gantt chart
传统的FPGA开发流程和基于Catapult C的开发流程如图3所示。使用Catapult C可通过添加约束,方便快捷地进行面积和时序优化,根据甘特图可分析相应约束的添加,大大缩短了开发周期。因此,笔者采用基于Catapult C的FPGA开发流程进行电子节气门的积分分离PID控制器的设计。

图3 两种方式的设计流程图Fig.3 Design flow of two ways
3.2 控制器的设计
笔者选用的FPGA是Altera公司StratixⅢ系列的EP3SL150F1152C2N芯片,具有142.5 KLEs,355个M9K Blocks,8个锁相环,384个18×18 bit乘法器,其硬件资源可达到控制系统的要求。为了对比基于Verilog全硬件的控制器的快速性,笔者设计了两种基于FPGA的实现方案,记录两种方案控制器的运行时间。
3.2.1 基于FPGA的SOPC方案
该方案在设计控制器时首先在SOPC Builder中添加相应组件,根据系统的实际功能,利用QuartusⅡ中的SOPC Builder工具分别进行Nios核(CPU)、片上存储器(On-Chip Memory)、系统ID(System ID Peripheral)、通用异步接收器/发送器(JTAG UART)核、锁相环(Avalon ALTPLL)和并行输入/输出(PIO)核等的配置,具体配置如图4a所示。配置后需要在NiosⅡIDE中编写C/C++代码。图4b中的代码是测试积分分离PID算法在NiosⅡIDE中的运行时间。
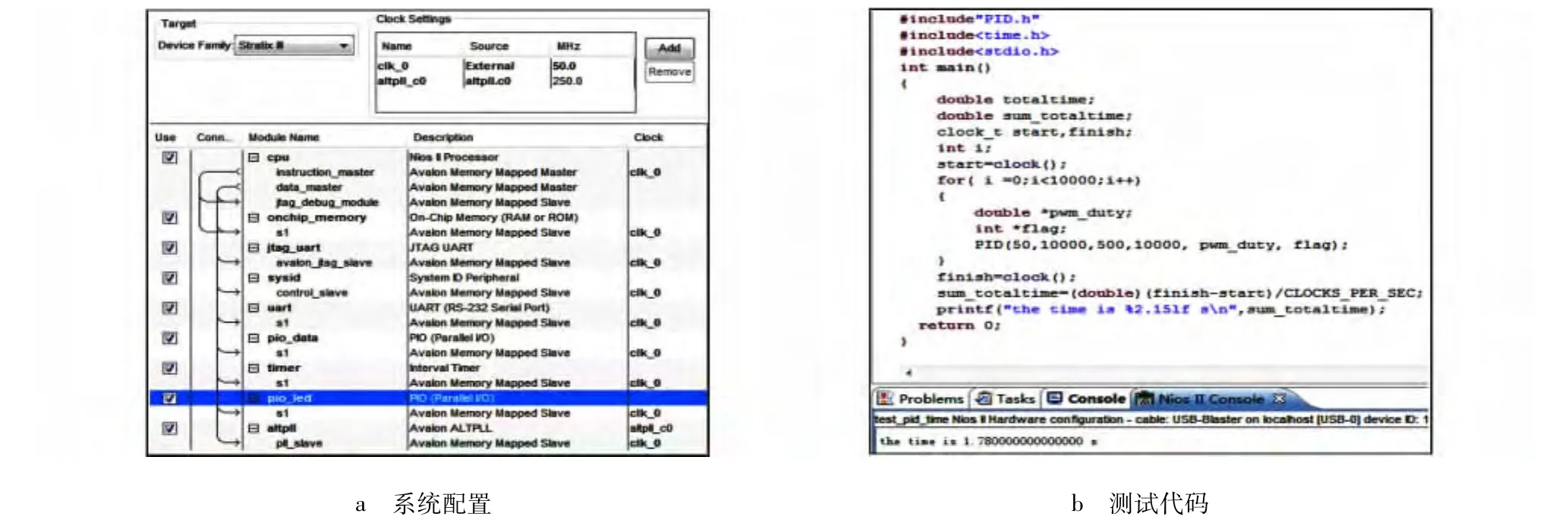
图4 SOPC方案软硬件设计图Fig.4 Hardware and software design based on SOPC scheme
最终在FPGA开发板中进行测试,在执行了10 000次PID积分分离PID算法后打印的计算时间是1.78 s,即基于SOPC方案的积分分离PID控制器每次执行时间是0.178 ms。
3.2.2 基于Catapult C全硬件方案
1 )定点模型设计。Catapult C的输入文件一般有两个:①实现具体功能的C文件;②用于对该函数功能验证的测试文件[19]。首先编写增量式积分分离PID函数的C/C++代码,考虑到实际PID参数需要整定,算法的C代码中把要调节的比例KP、积分KI、微分KD系数设置成输入变量,在Catapult C中会将各系数映射为模块的输入端口,便于参数调节。
为了提高算法计算性能,减少硬件资源消耗,需要设计定点数据模型。PID函数变量中包含偏差输入eerr,比例KP、积分KI、微分KD系数、输出占空比ppwm_duty和正反转控制位fflag。eerr为AD的输出12位数字量;由于Verilog语言不支持浮点数据,KP、KI、KD是经过扩大相应倍数转换得到的整数;flag是节气门状态标志位,1代表PID的输出占空比为正值,节气门正转,0代表负值,节气门反转。各变量数据定点数据模型设计如表1所示。ac_fixed〈W,I,false〉表示无符号定点小数,其中W代表数据的位宽,I代表整数位的位宽,false代表无符号数据;ac_int〈W,false〉代表无符号整型。
2 )Catapult C综合。增量式积分分离PID控制器的C程序在Catapult C中进行综合,综合后生成面积时序估计图,观察系统各项指标,为优化算法性能,将代码进行流水线处理。优化后硬件电路的面积时序估计图如图5所示。从图5可看到,优化后硬件电路的延迟时间降低,吞吐量增加,提高了系统性能。为控制算法的启停,在系统中加入握手信号,添加start标志位,控制算法的启停,当start开启时,PID算法进行运算;同时添加done信号,每执行一次PID运算,输出一个完成done信号。

表1 PID函数各变量数据类型的设计Tab.1 Data type of each variable design in PID function

图5 增量式积分分离PID控制算法电路的面积和时序估计图Fig.5 Area and timing estimates figure of incremental integral separation PID control algorithm
3.2.3 ModelSim 功能验证
完成RTL代码转换后需要进行功能验证,为了测试,在主函数中将输入偏差eerr以及比例KP、积分KI、微分KD系数设置为常值,观察输出占空比ppwm_duty以及标志位fflag的值。仿真结果如图6所示。将输入偏差eerr设置为16进制400(对应偏差角度为-45°),比例KP设置为10 000(相当于实际参数1)、积分KI设置为500(相当于实际参数0.05)、微分KD设置为10 000(相当于实际参数1)。代入增量式积分分离PID算法计算ppwm_duty值、fflag值与仿真结果一致,验证了积分分离PID算法的正确性。

图6 Modelsim中的仿真测试图Fig.6 The figure of Modelsim simulation test
图5中的Latency time代表生成的基于Verilog硬件语言的积分分离PID控制器的每次执行时间,单位是ns,基于Catapult C方案优化后控制器每次执行时间为60 ns,相对于SOPC方案,其性能得到了提升。这是由于Verilog代码在FPGA中是并行操作,而C/C++代码在硬件中为串行执行。
文献[12]中采用的是单片机作为控制器的硬件实现,基于单片机方案的控制器跟基于FPGA的SOPC方案的控制器类似,所以笔者添加了基于FPGA的SOPC方案,对比基于Catapult C全硬件方案和SOPC方案的控制器单次运行时间如表2所示。
通过对比以上两种方案,从表2的数据可知,基于FPGA的Catapult C方案作为硬件实现的控制器具有很好的实时性和快速性。
3.3 接口模块设计
该实验的接口模块主要包括AD/DA接口模块、PWM驱动模块和Timer模块。硬件系统编程通过状态机实现[20],可以很好地控制每个模块的工作时序,使系统有序地进行数据处理和运算,具体功能模块如下。
1 )AD接口模块。接口模块首先对AD芯片初始化然后进行数据的读取。
初始化:初始化AD模块,主要是对AD芯片的复位以及控制字的写入。图7为具体状态机的流程图。
数据读取:捕捉DATA_AV信号,读取转换数据。
THS1206内部带有16位深度的FIFO,转换的数据根据设置的不同触发级别先将数据存入FIFO中,直到存到设置深度产生DATA_AV标志信号,在下一次DATA_AV有效前要求FPGA读出FIFO中数据。笔者设置对模拟信号进行自动扫描,FIFO设置成4个字的深度。图8为读取数据的状态机的流程图,每次通过捕捉DATA_AV信号,读取4个转换数据。

表2 基于两种不同方案控制器硬件实现对比Tab.2 Controller hardware realization comparison based on two different schemes

图7 AD初始化写操作状态机流程图Fig.7 The flowchart of AD writing initialization
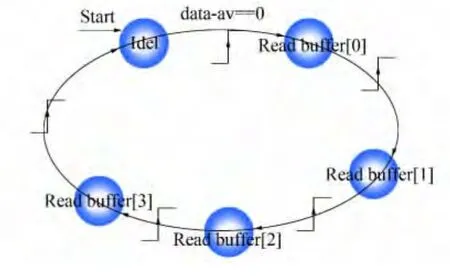
图8 AD读取数据状态机流程图Fig.8 The flowchart of AD reading initialization
2 )PWM驱动模块。模块中将clock_divide和duty_cycle以及pwm_enable作为输入接口,pwm_out作为输出接口,主要通过计数器对高低电平的计数实现模块功能。其中duty_cycle是在一个周期内对高电平的计数,clock_divide是对一个周期的计数。实验中duty_cycle接PID输出占空比pwm_duty端口,pwm_enable接PID模块的信号完成done信号,周期clock_divide设为常值。图9为在ModelSim中验证PWM模块功能的测试图。可以看到当给定clk周期为100 ns,设置clock_divide值为10 000时,周期为10 000×100 ns=1 000 000 ns,当duty_cycle为4 000时,输出pwm波的高电平时间为4 000×100 ns=400 000 ns,占空比为0.4。

图9 PWM功能测试图Fig.9 PWM function test chart
3 )Timer模块。Timer模块为一个计数器,周期设置为1 ms,每1 ms执行一次PID计算,通过Timer控制PID的开启信号start,使算法按照一定的频率计算,保证结果的准确性。
4 电路板制作
笔者实验中的AD/DA数据采集板硬件设计流程主要包括芯片的选取,电路的设计。AD/DA通信板主要包括 AD转换芯片 THS1206、DA转换芯片 AD5344、运算放大电路 LM324、电平转换芯片74LVC4245A以及相应外围电路电阻电容等。其中AD芯片THS1206和运放电路LM324配合使用,将输入电压由0~5V范围转换到符合AD芯片允许范围的输入电压。
选用的AD转换芯片为THS1206,具有较好的性能以及转换速率。它是一款12位并行转换芯片,带有4路模拟输入端,采样时可以将4路模拟输入端组成4个互不影响的单独输入端或两组差分输入。
选用的DA转换芯片为AD5344,它是12位的数模转换器,供应电压范围是2.5~5.5 V。输入给AD5344的数据是双缓冲的,通过LDAC引脚实现多路DAC同时转换。
选用的PWM驱动是有刷直流电机驱动,驱动器型号是BRT60A,其中的驱动是(带有MOS管IRLR7843)IR2184芯片,该驱动具有较好的抗干扰能力,输入3.3 V和5 V兼容,最大承受的电流是60 A。
4.1 AD/DA通信板的测试
DA芯片应用在半实物仿真实验中,为配合AD芯片验证本设计的AD/DA通信板的通信以及控制器的功能。笔者构建了基于FPGA和dSPACE的半实物实时仿真平台,开发板FPGA作为控制器的硬件实现,运行积分分离PID控制算法;由dSPACE DS1104运行Matlab/Simulink中的电子节气门离线数学模型。图10是在Matlab/Simulink里搭建的系统实时仿真实验模型。实验时,先不加入PID控制器,测试AD/DA通信板通信功能,之后再加入控制器和电子节气门数学模型进行控制器的功能测试。而在实物实验时,不再使用DA芯片,而是将控制器算出的占空比发送给PWM驱动器以驱动节气门。
笔者设计采用的是Altium公司推出的DXP 2004 PCB软件,设计完成了从原理图的绘制到PCB板的生成,图11为本实验的AD/DA实验电路板。
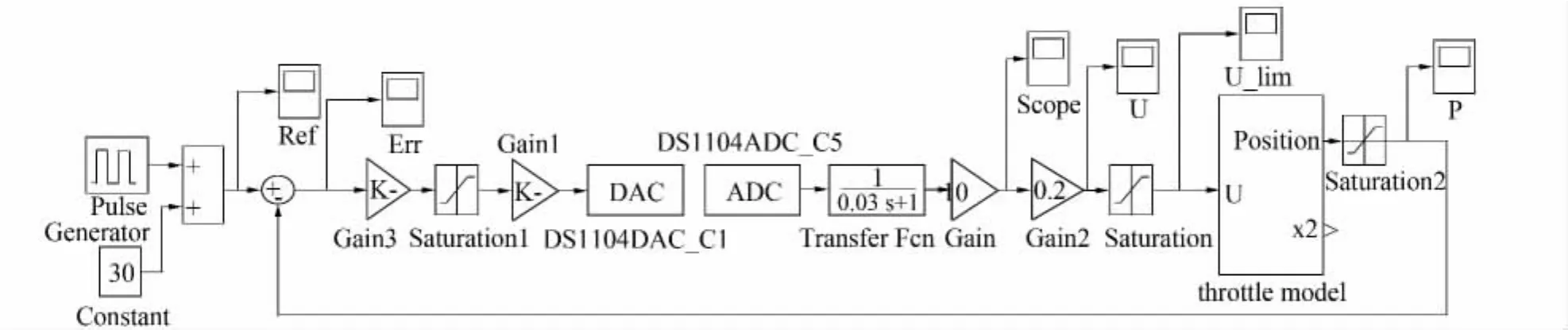
图10 基于FPGA和dSPACE的Matlab/Simulink模型Fig.10 Matlab/Simulink model based on FPGA and dSPACE
5 实物实验
笔者讨论的节气门的具体跟踪指标为:上升时间小于100 ms;调节时间小于140 ms;尽可能不超调;静态误差小于2°。
5.1 实物控制实验台架
该设计的实物实验需要利用xPC工作平台实现,xPC是Mathworks公司推出的基于Matlab的工具箱,被广泛应用于系统实验。xPC的运行一般需要2台计算机共同完成,一台主机(Host),一台目标机(Target),在主机Host中搭建Matlab/Simulink的实物监测模型,目标机Target供该实验跟踪波形的观测。运行Matlab/Simulink和Real-Time Workshop的计算机称为主机(Host),运行xPC实时任务的计算机称为目标机(Target)。两台计算机通过通信电缆连接[21]。图12为电子节气门实物控制的实验台架。在主机Host中搭建Matlab/Simulink实物监测模型,目标机Target供本实验跟踪波形的观测,电脑PC用来配置FPGA,电子节气门实物为控制系统的被控对象,电源用来为PWM驱动板供电。

图11 AD/DA通信板Fig.11 AD/DA communication board

图12 节气门实物控制实验台架Fig.12 Throttle physical control test bench
根据图1实物控制框图,测量油门踏板位置信号的是传感器,油门踏板被踩下的角度转换成电压后传入xPC Target,为将外部实物与xPC-Target仿真系统连接起来,xPC-Target内部提供适当的I/O板卡作为中间的数据接口。针对节气门控制系统设计的需要,此处选择研华的PCL-818L。包括16路单端或8路差分的12位模拟量输入A/D端口,其中每个输入通道的增益可编程(分别为0.5,1,4或8),板卡可以采集油门踏板的信号作为控制系统的给定输入。节气门开度信号是由闭环系统的反馈回路返回的实际节气门转角,通过笔者制作的AD板采集,xPC采集的给定信号与AD板采集的反馈信号的偏差作为FPGA开发板的输入经积分分离PID控制器计算,得出占空比信号并发给PWM通信板,经驱动板驱动电子节气门。
5.2 实验结果及分析
当给定为不同信号时,经过反复调试,调节的PID参数:KP=3.86,KI=0.068,KD=1。
1 )当给定为阶跃信号为85°时,仿真曲线如图13所示。
由图13可看出,跟踪波形没有超调,没有静差,节气门上升时间为70 ms,稳定时间为90 ms,节气门可以很快地跟踪给定信号,达到稳定,满足控制要求。证明基于Catapult C的全硬件控制器具有很好的实时性与快速性。
2 )当给定为方波信号的最小值为20°,最大值为80°,周期为2 s时,仿真曲线如图14所示。

图14 给定为方波信号时, 位置信号跟踪波形Fig.14 The position signalwaveform tracking waveform when a signal is given as a square wave signal

图13 给定阶跃信号为85°时,位置信号跟踪波形Fig.13 The tracking position signalwaveform when a signal is given to a step size of 85°
由图14可看出,跟踪曲线稳定后系统无静差,当节气门打开时,上升时间和稳定时间分别为70 ms和90 ms;节气门关闭时,节气门响应时间为60 ms,稳定时间为90 ms,可以很快地回到给定位置,在节气门关闭时对比文献[12]其性能也有提高。证明控制器在打开关闭都能很快速地达到期望值,设计的控制器稳定有效。
3 )当给定为正弦波信号最小值为15°,最大值为85°,周期为3 s时,仿真曲线如图15所示。
由图15可看出,当给定为正弦波时,节气门在20°~80°之间曲线重合度较好,跟踪无静差,满足控制要求,证明了基于FPGA的控制器实时性较好并且满足控制器的稳定性。
4 )当给定为油门踏板信号时,仿真曲线如图16所示。

图15 给定为正弦信号时,位置信号跟踪波形Fig.15 The waveform of the tracking position signal when a signal is given as a sinusoidal signal

图16 给定为油门踏板信号时,位置信号跟踪波形Fig.16 The waveform of the tracking position signalwhen the accelerator pedal as a signal
为证明基于FPGA的控制器在随机变化开度下的稳定性,随机踩下图12所示的油门踏板,由图16可看出,当随机给定节气门开度时,节气门仍然能很好地跟踪给定信号,控制器的稳定性可以适应随机变化的踏板信号。
6 结 语
笔者从硬件实现的角度采取基于FPGA和Catapult C的全硬件方案实现积分分离PID控制器,通过AD/DA采集板采集数据,最终实现基于FPGA的电子节气门的实物控制。实验验证了基于FPGA全硬件方案实现积分分离PID控制器的可行性、快速性,同时表明了基于FPGA实现的控制器具有微型化和高灵活性的特点,可以很好地满足新应用的要求。
笔者采用了积分分离PID控制算法,下一步工作采用先进的MPC控制算法以及神经网络PID算法等,进行电子节气门实物控制,以达到更好的控制效果。
[1]MCKAY D,NICHOLSB,SCHREURSG.Delphi Electronic Throttle Control Systems for Model Year 2000[DB/OL].Driver Features,System Security and OEM Benefits.(2000-03-06).[2013-11-26].http:∥www.doc88.com/p-5009938541323.htm l.
[2]郭辉,张云龙.基于模糊滑模控制的电子节气门仿真[J].小型内燃机与摩托车,2007,36(2):43-46.
GUO Hui,ZHANG Yunlong.Simulation of Electronic Throttle Based on Fuzzy Sliding Mode Control[J].Small Internal Combustion Engine and Motorcycle,2007,36(2):43-46.
[3]王霆,朱二欣,林学东,等.电子节气门滑模变结构控制方法研究[J].吉林大学学报:信息科学版,2008,26(6):647-651.
WANG Ting,ZHU Erxin,LIN Xuedong,etal.Study on Electronic Throttle Control Based on Non-Linear Sliding Mode Control Theory[J].Journal of Jilin University:Information Science Edition,2008,26(6):647-651.
[4]陈虹,胡云峰,郭宏志,等.基于backstepping方法的电子节气门控制[J].控制理论与应用,2011,28(4):491-496.
CHEN Hong,HU Yunfeng,GUO Hongzhi,etal.Control of Electronic Throttle Based on Backstepping Approach[J].Control Theory and Applications,2011,28(4):491-496.
[5]胡云峰,李超,李俊,等.基于观测器的输出反馈电子节气门控制器设计[J].自动化学报,2010,31(6):1241-1248.
HU Yunfeng,LIChao,LIJun,et al.Observer-Based Output Feedback Control of Electronic Throttles[J].Acta Automatica Sinica,2010,31(6):1241-1248.
[6]冯镇,肖寿高,焦磊,等.电子节气门控制策略仿真研究[J].计算机工程与设计,2012,33(4):1665-1669.
FENG Zhen,XIAO Shougao,JIAO Lei,et al.Research on Simulation of Electronic Throttle Control[J].Computer Engineering and Design,2012,33(4):1665-1669.
[7]付庆兴,高嵩,李义,等.基于Hilbert变换的单边带调制系统及FPGA实现[J].吉林大学学报:信息科学版,2012,30(1):60-65.
FU Qingxing,GAO Song,LIYi,et al.SSB Modulation System Based on Hilbert Transformation and FPGA Implementation[J].Journal of Jilin University:Information Science Edition,2012,30(1):60-65.
[8]梅近仁,秦贵和.基于嵌入式RTOS的AMT控制软件开发[J].吉林大学学报:信息科学版,2005,23(2):205-209.
MEI Jinren,QIN Guihe.Development of AMT Control Software Based on Embedded RTOS[J].Journal of Jilin University:Information Science Edition,2005,23(2):205-209.
[9]李志海,王耀南,徐磊,等.基于ARM的智能汽车电子节气门控制平台[J].工业控制计算机,2008,21(2):68-69.
LIZhihai,WANG Yaonan,XU Lei,etal.Intelligent Electronic Throttle Control Platform Based on ARM Microcomputer[J].Industrial Control Computer,2008,21(2):68-69.
[10]胡云峰,陈虹,刘明星,等.基于 FPGA/SoPC的预测控制器设计与实现[J].仪器仪表学报,2010,31(6):1241-1248.
HU Yunfeng,CHEN Hong,LIU Mingxing,et al.Design and Implementation of Model Predictive Controller Based on FPGA/SOPC[J].Chinese Journal of Scientific Instrument,2010,31(6):1241-1248.
[11]CHEN Hong,XU Fang,XI Yi.Field Programmable Gate Array System on a Programmable Chip Based Implementation of Model Predictive Controller[J].IETControl Theory and Applications,2012,6(8):1055-1063.
[12]郭孔辉,付皓,丁海涛,等.汽车电子节气门控制器开发[J].科学技术与工程,2008,8(2):446-450.
GUO Konghui,FU Hao,DING Haitao,et al.Development of Automotive Electronic Throttle Controller [J].Science Technology and Engineering,2008,8(2):446-450.
[13]PAUL H LEWIS,CHANG Yang.Basic Control Systems Engineering[M].Charlottesville,US:University of Virginia,1997.
[14]ERIKSON L,NIELSEN L.Non-Linear Model-Based Throttle Control[DB/OL].(2000-03-06).[2013-11-26].http:∥digitallibrary.sae.org/content/2000-01-0261.
[15]张瑞鹏,孙正光.钻机闭环测控系统的设计[J].吉林大学学报:信息科学版,2011,29(3):278-283.
ZHANG Ruipeng,SUN Zhengguang.Design of Closed-Loop Survey and Control System for Drill Rig[J].Journal of Jilin University:Information Science Edition,2011,29(3):278-283.
[16]李旭东,廖中浩,孟娇,等.基于CMOS摄像头的智能车控制系统设计及实现[J].吉林大学学报:信息科学版,2013,31(4):414-418.
LIXudong,LIAO Zhonghao,MENG Jiao,et al.Intelligent Vehicle Control System Design and Realization Based on CMOS Camera[J].Journal of Jilin University:Information Science Edition,2013,31(4):414-418.
[17]韵卓,陈龙冬,刘富,等.基于飞思卡尔单片机的智能电动小车设计[J].吉林大学学报:信息科学版,2013,31(3):272-278.
YUN Zhuo,CHEN Longdong,LIU Fu,et al.Design of Intelligent Electric Vehicle Based on Freescale Microcontroller[J].Journal of Jilin University:Information Science Edition,2013,31(3):272-278.
[18]游余新.利用Mentor高层次综合技术(Catapult Synthesis)快速实现复杂DSP算法[J].中国集成电路,2007(5):35-41.
YOU Yuxin.Implement Complex DSP Algorithms by Mentor High Level Synthesis Tool(Catapult Synthesis) [J].China Integrated Circuit,2007(5):35-41.
[19]谢正,张开峰.基于Catapult C的DCT算法设计[J].信息化研究,2011,37(4):42-45.
XIE Zheng,ZHANG Kaifeng.Design of DCT Algorithms Based on Catapult C[J].Informatization Research,2011,37(4):42-45.
[20]MARCUS MJLLER H C S,FENGLER W.From Control Design to FPGA Implementation,Technology and Engineering Applications of Simulink[M].Croatia:InTech,2012.
[21]苗立东,邹广德,石沛林,等.基于xPC的汽车测控系统的开发[J].汽车工程,2008,30(3):235-238.
MIAO Lidong,ZOU Guangde,SHIPeilin,et al.Development of Vehicle Monitoring and Control System Based on xPC[J].Automotive Engineering,2008,30(3):235-238.
Hardware Design and Implementation of Electronic Throttle Controller Based on FPGA
XU Yuetinga,b,JIDongdongb,XU Fangb,CHEN Honga,b
(a.State Key Laboratory of Automotive Simulation and Control;
b.College of Communication Engineering,Jilin University,Changchun 130022,China)
In order tomeet the control performance requirements of ETCS(Electronic Throttle Control System),
such as fast computational performance,low-cost,miniaturization,FPGA(Field Programmable Gate Array)is adopted as the hardware implementation of controller and integral separation is added to mature PID
(Proportional,Integral,Differential)control algorithm.And the integral separation PID controller with Catapult C high-level synthesis tools is implemented based on FPGA full hardware solution.An integral separation PID controller on a FPGA chip is designed for ETCS.In addition,AD/DA acquisition board is designed to implement the data transmission between integral separation PID controller based on FPGA and electronic throttle.Finally,
tracking experiments of electronic throttle are performed and the results demonstrate the effectiveness of the designed integral separation PID controller based on FPGA.
electronic throttle control system;field programmable gate array;hardware implementation;integral separation proportional integral differential(PID)control algorithm;tracking experiments
TP273
A
1671-5896(2014)03-0229-10
2013-11-27
国家自然科学基金重点资助项目(61034001);973课题基金资助项目(2012CB821202);吉林省科技发展计划重大专项基金资助项目(20116001)
许月亭(1989— ),女,长春人,吉林大学硕士研究生,主要从事FPGA技术及汽车电子控制研究,(Tel)86-13674312243(E-mail)xuyuetingjilin@163.com;通讯作者:陈虹(1963— ),女,浙江桐乡人,吉林大学教授,博士生导师,主要从事先进控制理论及汽车电子控制研究,(Tel)86-13578797009(E-mail)chenh@jlu.edu.cn。
张洁)
