基于改进模糊卡尔曼滤波的感应电机转速估计策略研究
2014-01-25王鑫博白保东于江华陈德志
王鑫博, 白保东, 于江华, 陈德志
(1.沈阳工业大学教育部特种电机与高压电器省部共建重点实验室,辽宁沈阳110870;2.辽宁省抚顺煤矿电机制造有限责任公司,辽宁抚顺113008)
0 引言
采用转速传感器作为反馈量的调速系统,可以很大程度上提高调速系统的性能。但转速传感器的安装将增加系统的成本及复杂程度,并降低系统可靠性,使系统不宜工作在复杂、恶劣的工况中。无速度传感器技术解决了上述缺陷,对提高系统可靠性和复杂环境的适应性具有重要意义。目前转速估计方案主要包括:动态转速估计器、基于PI调节器法、模型参考自适应法、自适应转速观测器法、转子齿谐波法、高频注入法、基于人工神经元网络方法、卡尔曼滤波器法等[1]。而无速度传感器技术对测量参数的要求较高,主要存在转速估计方案存在动态特性差、调节能力有限、易受外界环境干扰、存在抖动等问题。
卡尔曼滤波器感应电动机转速估计方法是线性卡尔曼滤波器方法在非线性中的应用。其主要思想是将电机的运动方程作为一个状态方程,把电机负载转矩看作系统的扩展状态量,根据定子侧测量的电压、电流值(包括测量误差),由卡尔曼滤波器估算出电机转子磁链、转速等信息。当系统接近线性但不是绝对线性时,卡尔曼滤波器通过一系列近似计算,能有效解决非线性问题,给出较优的状态估计。目前卡尔曼滤波器已广泛应用于电机参数估计中,并取得了很好的效果[2-8]。
本文针对由于电网电压、电流波动大,转速估计过程中采集数据易受测量参数剧烈波动而导致的转速估计误差增大的问题,提出采用基于扩展模糊自适应卡尔曼滤波的感应电动机无速度传感器控制策略。通过监视理论残差与实际残差的比值,对测量噪声协方差阵进行递推在线修正,使其逐渐逼近真实噪声水平,从而使滤波器执行最优估计,提升转速估计策略抗测量参数波动的能力,提高估算精确度。
1 常规卡尔曼滤波器转速估计策略
在两相静止坐标系下,以定子电流 isα、isβ作为输入变量,磁链 ψrα、ψrβ作为系统变量,可得感应电动机 3 阶状态方程为[9-16]

输出方程为

即
将式(2)、式(4)进行离散化处理得

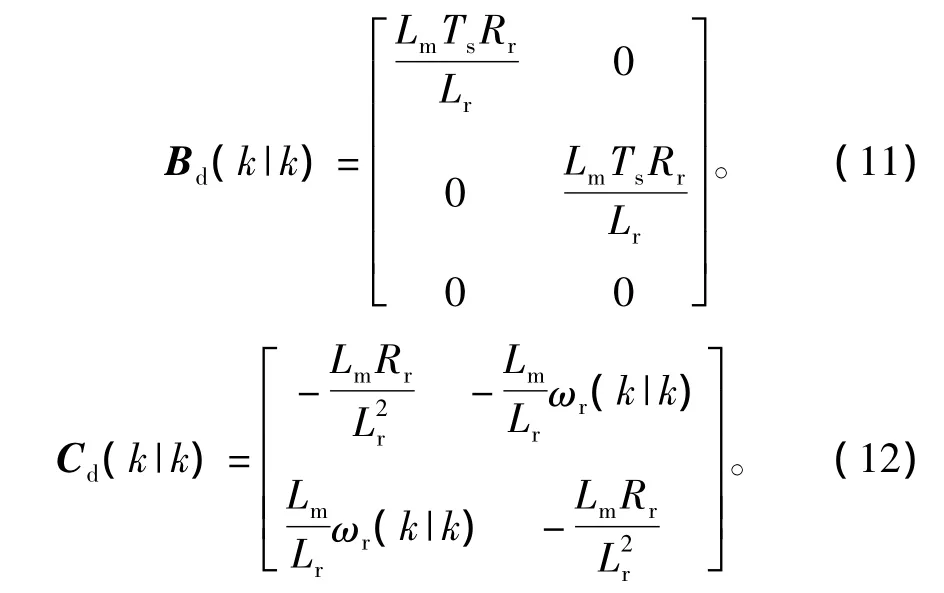
其中,w(k|k)、v(k|k)分别为系统噪声和测量噪声,TS为采用周期。定义系统噪声和测量噪声协方差分别为Q和R。
可以看出,卡尔曼滤波器系统状态向量维数为3×1,参数矩阵为 3×3、3×2、2×3。系统降为 3阶,只需要调3个噪声矩阵参数即可,降低了系统运算量,同时,降阶后,定子电阻参数被消除,避免了定子电阻因温升等变化对转速估计的影响,提高了系统的鲁棒性。表1所示为卡尔曼滤波器执行步骤[9-17]。
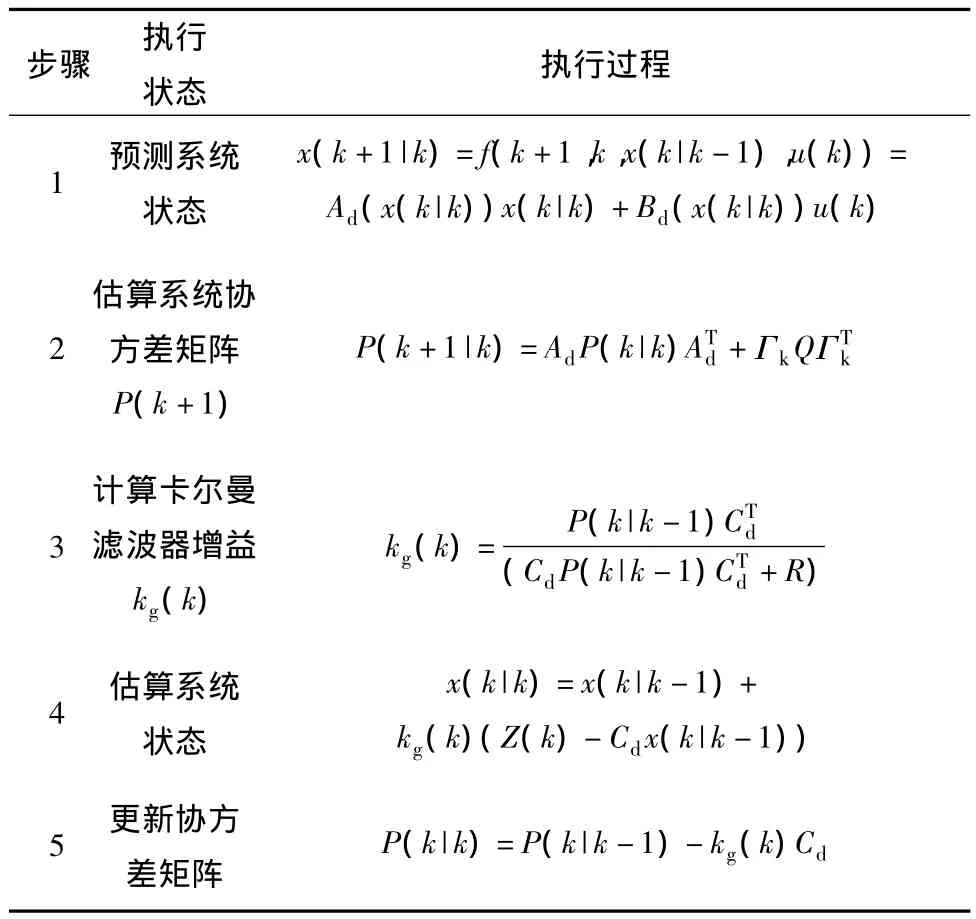
表1 卡尔曼滤波器执行步骤Table 1 Execution step of Kalman filtering
根据3阶感应电动机离散模型,并运用表1所示卡尔曼滤波器算法及步骤即可对电机转速进行估计。
2 基于改进模糊卡尔曼滤波器转速估计算法
实际情况下,卡尔曼滤波器的测量噪声难以准确得到,其随机性很强,如果仅用上述方案进行转速估计缺乏可靠的噪声方差会导致滤波器转速估计结果不准确,甚至发散。本文用模糊控制算法对卡尔曼滤波器的噪声方差进行在线修正,将卡尔曼滤波器调整到最优状态,从而提高转速估计精度。
当系统为精确数学模型时,残差方差实测值与理论值的比值应在1左右,如果比值偏离1并持续一定时间,说明测量噪声水平已经发生了变化,需要对测量噪声协方差阵R进行调整,使其比值回到1附近[2-8]。因此,设计改进模糊卡尔曼滤波器转速估计方法如下。式(13)为卡尔曼滤波增益更新方程变形。

其中,Rk=δkRk-1为第k次测量噪声矩阵的估计值,δk为对测量噪声矩阵Rk-1的调整系数。
定义残差的理论值为

定义残差的实测方差为

其中,Fr为最新 M个残差向量方程的平均值,i0=k-M+1,ri=Z(i)-Cx(i|i-1)为残差序列。
定义残差实际测量方差与理论方差的比值为

其中,trace()为对矩阵进行求迹运算。
由式(14)、式(15)、式(16)可以看出,当环境噪声(电网电压、电流波动幅度增大)增大时,比值FEk随着增大,此时调整δk使Rk增大,可使残差的理论方差阵Ek增大,进而导致比值FEk减小;反之调整使Rk减小,可使Ek减小,进而导致比值FEk增大。
因此Rk可以调节FEk在1附近。有如下规则:
1)当模型准确时,FEk接近1。
2)当测量噪声Fr增大时,使FEk增大,此时增大Rk,使FEk回到1附近。
3)当测量噪声Fr减小时,使FEk减小,此时减小Rk,使FEk回到1附近。
同时,由式(13)可知

1)定义输入输出变量
设计的模糊控制器为单输入,单输出控制系统,输入变量为残差实际测量方差与理论方差的比值FEk;输出变量为对测量噪声矩阵 Rk-1的调整系数 δk。
2)定义变量的模糊化条件
为简化计算,使设计的模糊控制器在实际系统中便于实现,采用等腰直接三角形作为FEk、δk的隶属度函数。图1所示为模糊控制器的输入、输出隶属度函数。并定义模糊子集为0.95<X0<1,为在1附近的数。

图1 模糊控制器输入/输出隶属度函数Fig.1 Input/Output membership functions of fuzzy controller
3)设计控制规则库
根据式(17),模糊控制器的模糊规则为

4)设计模糊推理结构
本文采用Mamdani极大极小推理法实现模糊推理这一个过程。
5)选择精确化计算方法
本文采用重心法进行精确化计算,输出模糊集合δk的精确化计算公式为

其中:m为δ'k模糊子集的个数;Fi为各个模糊子集最大隶属度对应的数值;μFi为模糊子集所对应的隶属度。图2所示为基于改进模糊卡尔曼滤波器感应电动机转速估计控制器程序流程。

图2 基于改进模糊卡尔曼滤波器感应电动机转速估计流程图Fig.2 Speed estimation flowchart of induction motor based on improved fuzzy Kalman filtering
3 仿真及实验研究
考虑实际情况,仿真应尽可能与实际逼近。本文采用基于Matlab及Ansoft的协同仿真技术。将基于模糊卡尔曼转速估计的感应电机矢量策略路的问题,转换成场的问题。提高仿真精度,缩短仿真与实际参数误差。表2为感应电机基本参数。图3为协同仿真模型。图4所示为基于改进模糊卡尔曼的感应电机转速估计矢量控制策略。

表2 感应电动机基本参数Table 2 Basic parameters of induction motor
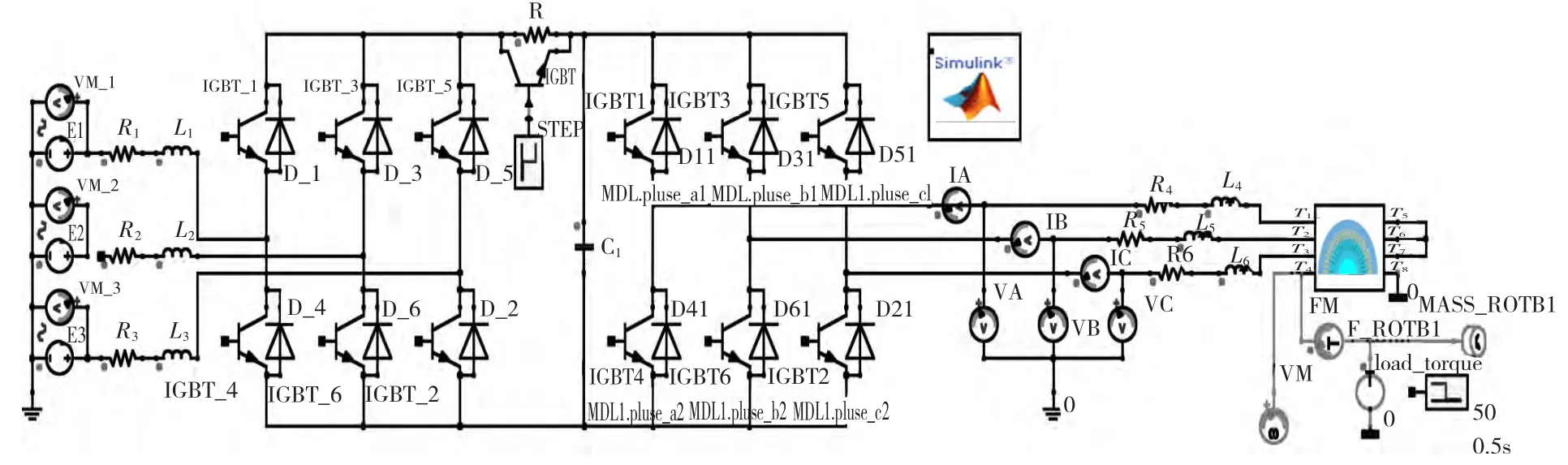
图3 协同仿真模型Fig.3 Coa-simulation model

图4 矢量控制策略Fig.4 Vector control strategy
3.1 基于改进模糊卡尔曼滤波的感应电机转速估计策略仿真研究
为验证本文提出扩展模糊卡尔曼转速估计对测量误差的抗扰能力,在1 s时,A相电流加入一个脉冲干扰电流,图5为感应电机在转速为1 200 r/min稳态时磁场分布,图6为基于卡尔曼滤波器转速估计策略的转速对比,图7为卡尔曼滤波器转速估计误差,图8为基于扩展模糊卡尔曼滤波器转速估计策略的转速对比,图9为扩展模糊卡尔曼滤波器转速估计误差。表3为存在扰动电流时,转速估计误差对比。

图6 卡尔曼滤波器转速估计对比Fig.6 Speed estimation comparison of Kalman filtering

图7 卡尔曼滤波器转速估计误差Fig.7 Speed estimation error of Kalman filtering

图8 扩展模糊卡尔曼滤波器转速估计对比Fig.8 Speed estimation error of extended fuzzy Kalman filtering
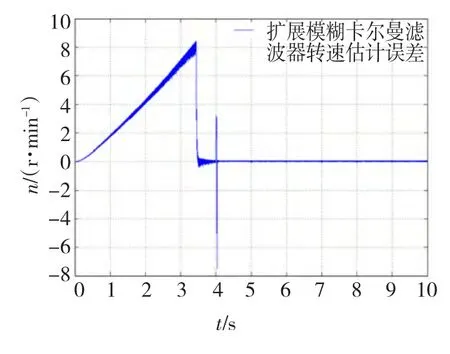
图9 扩展模糊卡尔曼滤波器转速估计误差Fig.9 Speed estimation error of extended fuzzy Kalman filtering

表3 存在扰动电流时,转速估计误差对比Table 3 Comparison of speed estimation error when there is disturbance current
从图6至图9及表3中可以看出,在1 s时加入一个扰动,卡尔曼滤波器转速估计方案及扩展模糊卡尔曼滤波器转速估计方案,都会有一些波动,但卡尔曼滤波器转速估计方案在扰动干扰过程中有一个较大的估计误差,最大值为101 r/min,而扩展模糊卡尔曼滤波器转速估计方案最大值为0.4 r/min,说明扩展模糊卡尔曼滤波器转速估计方案抗测量误差干扰能力更强。
3.2 基于改进模糊卡尔曼滤波的感应电机转速估计策略实验研究
1)空载起动时转速实验研究
为观察系统在起动至稳定阶段的时间及转速跟随特性,研究其起动特性是必要的。图10所示为起动转速为1 200 r/min时实际转速及估计转速对比。
从图10中可以看出,起动过程中,实际转速与估计转速吻合很好,存在1 s延时。证明本文提出的基于扩展模糊卡尔曼滤波的转速估计策略完全可行。
2)突加转速时电机转速实验研究
系统实验时,设定指令转速为n*=1 200 r/min,负载为额定负载。当15 s时,设定指令转速n*=400 r/min。当21 s时,设定指令转速n*=1200 r/min。图11为采用扩展模糊卡尔曼滤波器估计转速波形。
从图11中可以看出,采用扩展卡尔曼滤波器转速估计在转速上升及下降过程中,总体能够在加速和减速时对转速进行正确跟踪,其稳态效果较好。

图10 起动转速为1 200 r/min时实际转速及估计转速对比Fig.10 Comparison between given speed and estimated speed at 1 200 r/min starting speed
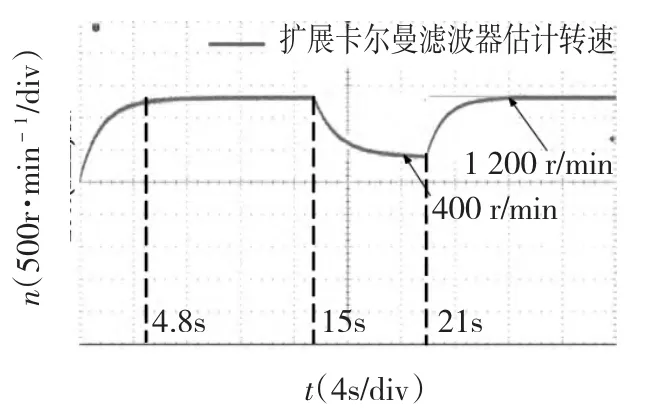
图11 扩展卡尔曼滤波器估计转速Fig.11 Actual speed using extended Kalman filtering

图12 采用卡尔曼滤波器及扩展模糊卡尔曼滤波器转速对比Fig.12 Speed comparison between using Kalman filtering and extended fuzzy Kalman filtering
3)相电流加入一个扰动时电机转速实验研究
系统实验时,设定指令转速为n*=1 200 r/min,负载为额定负载。在13 s时在A相电流中加入一个1 A扰动。图12为采用卡尔曼滤波器及扩展模糊卡尔曼滤波器转速对比。
从图12中可以看出,卡尔曼滤波器在受到外界干扰时,波动较大,抗差能力较差,而基于扩展模糊卡尔曼滤波器在受到外界干扰时,波动较小,具有一定的抗外界干扰的能力。
4 结语
本文基于模糊卡尔曼滤波技术,对1 140 V/75 kW感应电机转速进行估计。视转速为状态变量,从而改善由于在低速时定子电流不能准确传递转子变量信息造成的辨识误差,克服了传统估计方法的缺点。能够在较宽的速度范围内达到稳定。具有算法简单、精度高等优点。同时,在仿真过程中,通过Matlab与Ansoft构造一种协同仿真技术,将二者优点相结合,能准确反映控制系统的真实情况,有助于分析矢量控制算法对感应电机实际磁场的影响,通过仿真及实验对比,系统对转速估计误差较小,为转速估计参数的优化节约了时间。对工程实施具有实际的指导意义。
[1]陆海慧,钱巍.异步电机转速估计方法综述[C]//第12届全国电气自动化与电控系统学术年会,南京,2004,10:10-14.
[2]张池平,刘宗尧.一种改进的自适应模糊卡尔曼滤波算法[J].学术探讨,2007,3(28):25 -28.ZHANG Chiping,LIU Zongrao.An improved algorithm of self- adaptive fuzzy kalman filter[J].Academic research,2007,3(28):25-28.
[3]张高煌,赵恒,杨万海.一种新的模糊卡尔曼滤波器的控制算法及应用[J].控制理论与应用,2005,2(6):861 -864.ZHANG Gaohuang,ZHAO Heng,YANG Wanhai.The control algorithm and application of a new fuzzy kalman filter[J].Control Theory and Applications,2005,2(6):861 -864.
[4]李德东,王振臣,郭小星.基于模糊卡尔曼滤波的HEV氢镍电池SOC 估计[J].电源技术,2011,5(2):191-193.LI Dedong,WANG Zhenchen,GUO Xiaoxing.HEV NiMH battery SOC estimation based on fuzzy kalman filter[J].Power Technology,2011,5(2):191 -193.
[5]马野,王孝通,付建国.基于模糊卡尔曼滤波量测噪声自适应校正的方法研究[J].中国惯性技术学报,2005,13(2):24 -26.MA Ye,WANG Xiaotong,FU Jianguo.The research of measurement noise adaptive calibration based on kalman filter[J].Chinese Inertial Technology,2005,13(2):24 -26.
[6]徐田来,游文虎,崔平远.基于模糊自适应卡尔曼滤波的 INSPGPS组合导航系统算法研究[J].宇航学报,2005,26(5):571-575.XU Tianlai,YOU Wenhu,CUI Pingyuan.The research of INSPGPS navigation system algorithms based on self-adaptive fuzzy kalman filter[J].Journal of Astronautics,2005,26(5):571 -575.
[7]柏菁,刘建业,袁信.模糊自适应卡尔曼滤波技术研究[J].信息与控制,2002,1(3):192 -197.BAI Qing,LIU Jianye,YUAN Xin.The research of selfadaptive fuzzy kalman filter technology[J].Information and Control,2002,1(3):192-197.
[8]李剑飞,尹泉,万淑芸.基于扩展卡尔曼滤波器的异步电机转速辨识[J].电工技术学报,2002,17(5):40 -44.LI Jianfei,YIN Quan,WAN Shuyun.Induction motor speed identification based on extended kalman filter[J].China Electrotechnical Society,2002,17(5):40 -44.
[9]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36):36-40.ZHANG Meng,XIAO Xi,LI Yongdong.The speed and flux observer of PMSM based on extended kalman filter[J].Chinese Society for Electrical Engineering,2007,27(36):36 -40.
[10]李洁,钟彦儒.基于无轨迹卡尔曼滤波器的感应电机转速估计[J].系统仿真学报,2006,18(3):693 -697.LI Jie,ZHONG Yanru.Speed estimation of induction motor based on kalman filter without locus[J].Journal of System Simulation,2006,18(3):693 -697.
[11]陈一虹,颜东,张洪钺.自适应卡尔曼滤波实时性研究及其应用[J].北京航空航天大学学报,1996,22(2):146 -149.CHEN Yihong,YAN Dong,ZHANG Hongyue.The research and application of self-adaptive kalman filter real-time performance[J].Journal of Beijing University of Aeronautics and Astronautics,1996,22(2):146 -149.
[12]ESCAM ILLA -AMBROSIO P J,MPORT N.Multis- ensor data fusion architecture based on adaptive Kalman filters and fuzzy logicperformance assessment[J].Proceedings of the Fifth International Conference on Information Fusion,2002,(2):1542 -1549.
[13]Hamid A Toliyat,EMIL Levi,MONA Raina.A review of RFO induction motor parameter estimation techniques[J].IEEE Transactions on Energy Conversion,2003,18(2):271-283.
[14]LI Zhen,XU Longya.Fuzzy learning enhanced speed control of an indirect field -oriented induction machine drive[J].IEEE Transactions on Control Systems Technology,2000,8(2):270 -278.
[15]TANG Yong,XIE Shunyi,LI Chen.Research on optimimized extended kalman filter for speed sensorless vector controI of induction motor drive[J].Micromotors Servo Technique,2005,38(2):46-49.
[16]XU Kai.The asynchronous electric motor rotational speed identification performance appraisal based on extended Kalman filtering algorithm[J].Electrical Automation,2008,30(4):20 -23.
