基于理想转向梯形的纯滚动汽车转向机构设计
2014-01-25廖林清
王 伟,张 君,屈 翔,廖林清
(1.a.重庆理工大学机械工程学院;b.车辆工程学院,重庆 400054;
2.汽车零部件制造及检测技术教育部重点实验室,重庆 400054)
基于理想转向梯形的纯滚动汽车转向机构设计
王 伟1a,张 君1a,屈 翔1b,廖林清2
(1.a.重庆理工大学机械工程学院;b.车辆工程学院,重庆 400054;
2.汽车零部件制造及检测技术教育部重点实验室,重庆 400054)
对现行汽车断开式梯形转向机构进行运动学分析,提出了理想转向梯形的概念。建立了理想转向梯形的数学模型,导出了齿条拉杆的长度误差公式。设计出一种新型转向机构,实现了车轮在转向时的纯滚动。
汽车;理想转向梯形;纯滚动;转向机构
传统的转向机构是基于阿克曼转向理论发展起来的,但是该理论仅针对车辆转向时的理想状态。现有的技术通过调整转向机构中转向梯形的几何参数,只能近似满足阿克曼转角关系,无法保证转向轮绕转向汇交中心做纯滚动转向。这种由转向梯形带来的误差会加剧转向轮的磨损,增加转向阻力,同时还会造成车辆的侧滑,对行车稳定性、驾驶舒适性都有影响。设计完全符合阿克曼转向关系的转向机构一直是汽车设计的研究热点。
1 现有转向机构的运动分析
在如图1所示的汽车转向机构平面模型中,以断开式转向机构为基础,已知主销间距AB为b,梯形臂AD、BC长为r,横拉杆DE、CF长为 c,齿轮齿条拉杆EF长度为a,齿条轴线相对前轴线偏距为h。不考虑各杆件之间的空间夹角及运动副间隙,车轮的偏转直接带动转向梯形臂AD和BC转动。

图1 断开式转向机构模型
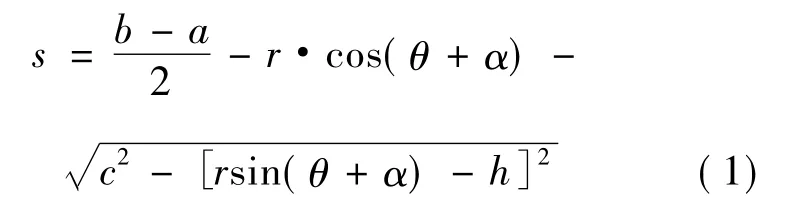
当汽车左转弯时,外侧右轮的杆系运动如图1所示。假设齿条拉杆EF向右移动至E″F'位置,行程EE″=FF'=s,通过右拉杆推动右梯形臂,使右轮转过角度α,则齿条拉杆行程s与右侧车辆转角α的关系为
内侧左轮的齿条拉杆EF向右同样移动了行程s,通过左拉杆推动左梯形臂,使左轮转过角度β,那么齿条拉杆行程s与左侧车辆转角β的关系为可得


式(3)中横拉杆CF、DE长度为

2 理想转向梯形的定义
将图1中的点C与D连接起来,使齿轮转向机构简化,则成如图2所示的等腰梯形ABCD。若两转向轮满足阿克曼转角关系实现纯滚动转向,那么称按照阿克曼转角关系变化后的转向梯形ABC'D'称为理想转向梯形。理想转向梯形构件名称和符号见表1。

图2 理想转向梯形简化模型

表1 理想转向梯形构件名称和符号


在实际转向梯形▱ABCD中易得CD即横拉杆m的值:m=b-2rcosθ。在此用σ来表示理想横拉杆与实际横拉杆之间的偏差,可得σ=n-m,即

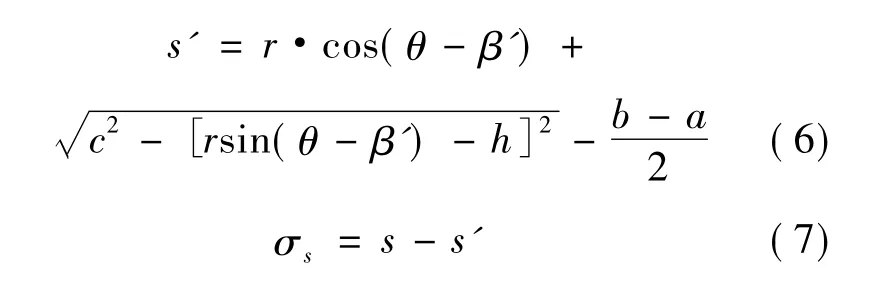
在外轮转角都为α的情况下,将理想转向梯形放到图1中的断开式汽车转向机构平面模型中,会发现内侧左车辆实际转角β与理想内侧左车辆实际转角β'存在一定差值。同样,齿条拉杆EF的实际位移为s,理想齿条拉杆位移为s',其位移之差为σs。
3 实例分析
已知某微型车的相关参数:主销间距 b=1 274.24 mm,轴距l=2 340 mm,梯形臂长r=111 mm,齿轮齿条拉杆长度a=624 mm,齿条轴线相对前轴线偏距h=85 mm,梯形底角θ=60°,最大外轮转角αmax=24°。
从图3、4可以看出:随着内轮转角β的增大,理想横拉杆与实际横拉杆之间的偏差σ增大,齿条拉杆位移差 σs也增大;在转向轮转角很小(<5.8°)时,横拉杆偏差与齿条拉杆长度误差比较小(<0.1 mm),接近满足阿克曼定理;最大内轮转角时,σmax=4.17 mm,σsmax=5.28 mm。当汽车右转弯时,横拉杆偏差σ、齿条拉杆位移差σs随内轮转角β增大的变化规律相同。

图3 横拉杆偏差σ随内轮转角β的变化情况

图4 齿条拉杆位移差σs随内轮转角β的变化情况
4 纯滚动转向机构设计
综合以上分析可知:通过改变转向横拉杆CD或者齿条拉杆EF的长度,能使转向机构满足阿克曼原理,实现汽车转向时车轮的纯滚动。
以图1所示的断开式转向机构为基础,针对现有技术存在的不足,设计出一种确保汽车在转向时车轮的偏转满足阿克曼转角关系的新型机构,其结构如图5所示。
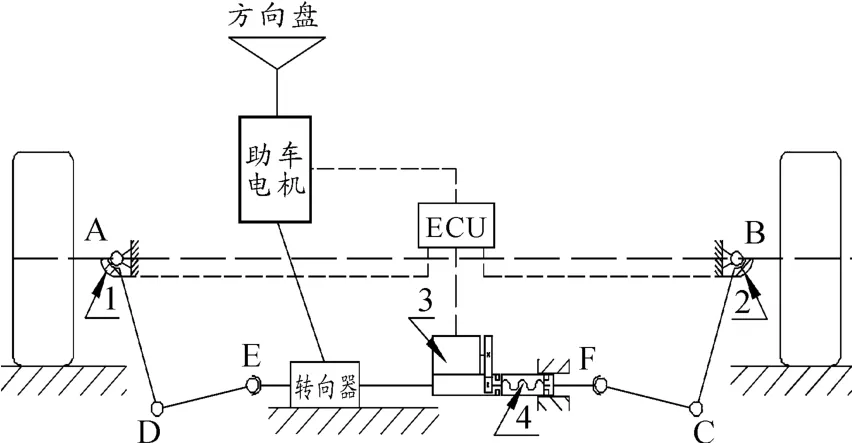
图5 新型纯滚动转向机构结构
该新型纯滚动汽车转向机构是将汽车的断开式转向梯形结构改造成机电控制,通过安装在转向左节臂处的角度传感器1和2发送信息,ECU接收信息,依照图4所示规律控制带自锁功能的伺服电机3转动,伺服电机3驱动滚轴丝杆4转动,推动螺母副使齿条拉杆EF的长度时时处于理想状态,ECU同时控制助力电机的输出转矩,以实现汽车的纯滚动转向。
本机构伺服电机3带动的齿轮上还安装有电磁式锁止阀。当伺服电机3出现故障时,电磁式锁止阀锁住齿轮,齿条拉杆EF的长度补偿功能失效。当汽车处于小角度转向时,可以近似认为做纯滚动转向,此时ECU控制伺服电机3自锁,只由助力电机提供助力转向作用。
分析图4可以看出齿条拉杆长度误差呈非线性变化,齿条拉杆理想长度ai=a+σs。为使车轮在不同转角状态下都能较好地近似满足前轮前束和阿克曼转角关系,同时简化ECU的控制策略,提高转向机构的工作效率,考虑滚轴丝杆与控制电机参数等因素,得到齿条拉杆控制长度a'与内轮转角β的关系如图6所示。
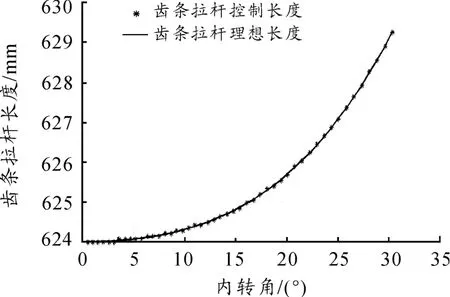
图6 齿条拉杆控制长度a'与理想长度ai
对比传统转向机构齿条拉杆位移误差,新型纯滚动汽车转向机构的齿条拉杆位移误差得到了明显的改善,如图7所示。此时汽车可以近似认为做纯滚动转向。
从图7可看出:新型纯滚动汽车转向机构的齿条拉杆位移还存在一定的误差,这是由于齿条拉杆控制长度误差造成的。图8为齿条拉杆控制长度a'与理想长度ai的误差。
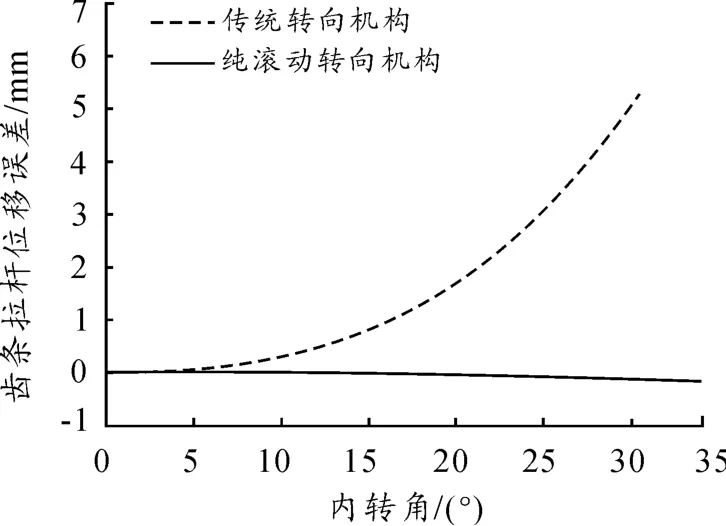
图7 机构齿条拉杆位移误差对比

图8 齿条拉杆控制长度a'与理想长度ai的误差
在图8中:内轮转角β在0~25°时,齿条拉杆长度误差在0.1 mm内;当β处于大转角时,误差也不超过0.2 mm,其误差主要来自简化的ECU控制、伺服电机、滚轴丝杆等。
5 结束语
经过对现有断开式转向机构的运动分析,根据理想转向梯形的原理误差,推导出齿条拉杆的长度误差,并设计了一种新型纯滚动汽车转向机构,使转向轮处于纯滚动状态,车轮不会发生横向滑动,减小了轮胎磨损,提高了行车稳定性和驾驶舒适性。
[1] 陈家瑞.汽车构造:下册[M].北京:机械工业出版社,2005:244-259.
[2] 肖永清.汽车前桥及转向系统结构与维修[M].北京:国防工业出版社,2004.
[3] 吴晓建.齿轮齿条式转向机构转向特性研究[D].重庆:重庆理工大学,2009.
[4] 冯永伟,钱瑞明.纯滚动汽车转向机构设计[J].机械设计与制造工程,2001(9):8-9.
[5] 周祥基,钱瑞.明汽车转向传动技术及其发展[J].机械制造与自动化,2004(6):9-12,15.
[6] 符亮.转向三角形的汽车转向机构特性[J].机械设计与研究,2011,27(4):84-87.
[7] 石启龙,杨建伟.基于MATLAB的断开式转向梯形机构优化设计[J].机械设计与制造,2011(2):8-10.
[8] 廖林清,王伟.基于横摆角速度增益的动态转向系统可变传动比[J].重庆理工大学学报:自然科学版,2011(4):1-5.
[9] 姚明龙,王福林.车辆转向梯形优化设计及其求解方法的研究[J].机械设计与制造,2007(5):24-26.
[10]屈翔,廖林清.齿轮齿条式转向机构的误差分析[J].重庆理工大学学报:自然科学版,2012(5):16-19,69.
Design of a Complete Rolling Automobile Steering Mechanism Based on Ideal Steering Trapezium
WANG Wei1a,ZHANG Jun1a,QU Xiang1b,LIAO Lin-qing2
(1.a.School of Mechanical Engineering;b.School of Automobile Engineering,Chongqing University of Technology,Chongqing 400054,China;
2.Key Lab.of manufacture and Test Techniques for Automobile Parts,Ministry of Education,Chongqing 400054,China)
In this paper,the kinematics property of the automobile break-off steering mechanism was analyzed.It defined the concept of the ideal steering trapezium and establishes the mathematical model of the ideal steering trapezium.We developed rack-lever error equations of line length,and designed a new automobile steering mechanism,which allowed a complete rolling of wheel turning.
automobile;ideal steering trapezium;complete rolling;steering mechanism
U463.4
A
1674-8425(2014)04-0029-04
2013-10-28
重庆市教委科学技术研究项目(KJ120813,KJ120818)
王伟(1981—),男,湖南常德人,实验师,主要从事车辆动力及控制研究。
王伟,张君,屈翔,等.基于理想转向梯形的纯滚动汽车转向机构设计[J].重庆理工大学学报:自然科学版,2014(4):29-32.
format:WANG Wei,ZHANG Jun,QU Xiang,et al.Design of a Complete Rolling Automobile Steering Mechanism Based on Ideal Steering Trapezium[J].Journal of Chongqing University of Technology:Natural Science,2014(4):29-32.
10.3969/j.issn.1674-8425(z).2014.04.006
(责任编辑 刘 舸)