无电流传感器永磁同步电机控制技术的研究
2014-01-21李勇,张强
李 勇,张 强
(中国兵器工业第58 研究所,四川 绵阳 621000)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor-PMSM) 具有效率高、体积小以及快速响应性好等特点,随着电机制造工艺及电机控制原理的发展,PMSM 在数控系统、工业控制及自动化生产线等场合得到广泛应用。高性能的永磁同步电机控制系统一般要求有高性能的电流(力矩)控制内环和转速、位置控制外环,这也就决定了控制系统必须具有高性能的电流、速度和位置反馈、接收处理装置,这在一定程度上增加了系统的复杂程度,也增加了生产和维护的成本。因此,少传感器和无传感器成为电机控制系统的一个重要发展方向,本文提出了一种无电流传感器的控制方法,可应用于有定位要求、不能缺少位置速度传感器的系统中。
1 永磁同步电机控制系统
1.1 永磁同步电机结构及原理
永磁同步电机本体是由定子和转子两大部分组成。永磁同步电机的定子指的是电动机在运行时的不动部分,主要包括定子电枢铁芯、三相(或多相)对称电枢绕组和机座三部分组成;永磁同步电机的转子是指电机在运行时可以转动的部分,主要由永磁体、导磁轭和转轴组成,永磁体贴在圆筒型的导磁轭上,导磁轭套在转轴上。当永磁同步电机的电枢绕组中通过对称的三相电流时,定子将产生一个以同步转速推移的旋转磁场;在稳态情况下,转子的转速恒为磁场的同步转速,于是,定子旋转磁场与转子的永磁体产生的主极磁场保持静止,它们支架相互作用,产生电磁转矩,拖动转子旋转,进行机电能量交换。当负载发生变化时,转子的瞬时转速就会发生变化,这时,通过与转子同轴的位置、速度传感器检测转子的位置和速度,利用逆变器控制定子绕组中电流的大小、相位和频率,就会产生连续的转矩作用到转子上。
通常在额定负载以内,气隙磁场与电枢电流无关,转矩与电流成线性关系。其中,转子磁场在空间的分布为正弦波的,当转子旋转时,在定子上产生的反电动势波形也为正弦波形。习惯上把正弦波永磁同步电动机组成的调速系统称为正弦型永磁同步电动机调速系统,简称为永磁同步电动机调速系统。
1.2 永磁同步电机数学模型
为了方便分析,忽略电机磁饱和、谐波及铁损等因素,可以将永磁同步电机等效成两绕组电机,在定、转子绕组中,通入适当的电流,就会产生相对应的定、转子磁动势,两磁动势相互作用,可产生电磁转矩,电磁转矩和两磁动势的幅值、夹角的正弦值成正比,电磁转矩的方向是使两磁动势矢量的夹角等于零的方向。产生稳定电磁转矩的条件是定、转子两磁动势在稳态时需相对静止,即以同一转速旋转。电动机调速的关键是转矩控制,电磁转矩控制的关键是电流矢量的控制。
所有的矢量在d-q 坐标系中均可分解成两个相互垂直的分量,其中d 轴选在转子磁极轴线上。

式中,id、iq分别为定子电流矢量的直轴分量、交轴分量;ψd、ψq分别为直轴定子磁链、交轴定子磁链;ud、uq为直轴定子电压、交轴定子电压。
在两绕组模型中,d-q 坐标系下,PMSM 定子电压矢量的两个分量为:

式中: r—电机电阻;p—磁极对数;ω—d-q 坐标系旋转角频率。将磁链方程:

式中: Ld、Lq分别为d-q 坐标系上的等效电枢电感。代入式(4),可得电机的电磁转矩方程:

式中: Tem—输出电磁转矩。
1.3 空间矢量脉宽调制
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使两分量互相垂直,彼此独立,然后分别进行调节。由于这些直流给定量在物理上是不存在的,是虚构的,因此,还必须再经过坐标的逆变换过程,从旋转坐标系回到静止坐标系,把上述的直流给定量变换成实际的交流给定量,在三相定子坐标系上对交流量进行控制,使其实际值等于给定值。
如图1 所示,系统控制过程为: 将速度指令信号与检测到的转子速度信号相比较,经速度控制器的调节,输出iq*指令信号,作q 轴电流控制器给定信号,d 轴电流控制器的给定信号为0。电流采样得到的三相定子电流IA、IB、IC通过Clark 变换转化为α-β 坐标系两相电流Iα、Iβ,通过Park 变换后,转化为d-q 旋转坐标系的电流值id,iq分别是d 轴和q 轴电流调节器的反馈输入。d 轴和q 轴电流的给定和反馈之间的偏差分别输入到d轴和q 轴的电流控制器,经过控制器的调节后输出电压ud、uq再经过Park 逆变换分别转化为α-β 坐标系轴电压uα、uβ,调 制SVPWM模块输出六路PWM 信号驱动IGBT 产生频率和幅值可变的三相正弦电流输入电机。
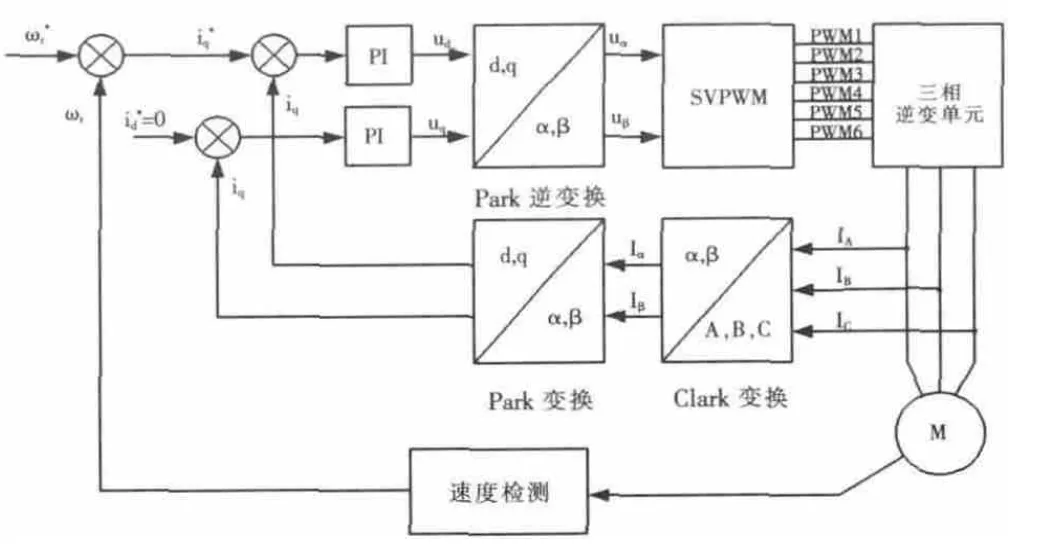
图1 PMSM 矢量控制系统框图
2 无电流传感器的电机控制系统
2.1 基于电机模型的无电流传感器控制方法
在有电流传感器的控制系统中,参考电压ud和uq是由电流控制器根据电流参考值和检测到的实际电流值之间的差值产生的。而在无电流传感器的控制系统中,电流控制是由电流参考值和电流估算值来完成的,参考电压也是由此在构造的电流模块中计算得到的。
将电机数学模型中式(4)的定子电压方程中与ω 有关的量分离出来,视为旋转电动势,同时令:

可得到新的定子电压方程:

根据式(8)构造电流模块,可得到如图2 所示的无电流传感器的永磁同步电机伺服系统控制框图。如图所示,系统只有速度环,ωr*是速度给定值,ωr是速度反馈值。位置调节和速度调节后得到转矩电流分量给定值iq*(id*=0),通过电流模块得到旋转的电压参考值分量ud,uq再经坐标变换及SVPWM,将得到的脉冲信号驱动控制VSI 逆变器中的功率开关。
由于没有电流传感器,图2 中的电流模块里的电流值只能采用估算的方法得到,以电压参考值ud*、uq*做为电流估算的输入,得到以下的估算电流方程式:

2.2 误差分析

图2 无电流传感器传感器PMSM 矢量控制系统框图
上文提出的估算方法中以电压参考值ud*、uq*代替电压实际值ud、uq作为电流估算的输入,但PWM 死区时间的存在等其他原因的存在可能会导致实际值与参考值之间有差值,这样电压之间的差值必然引起电流估算的误差,而以估算电流作为电流调节的反馈则使得电流实际值不能很好的跟随给定值。对于d 轴而言,电流实际值可能不等于给定值id=0。
另外,PWM 逆变部分在设计时,为防止逆变器桥上下臂开关器件同时导通,通常都要设置一个死区时间,以延缓开关器件开通,然而这一死区时间造成了电压参考值ud*、uq*不等于电压实际值ud、uq,因此电流估算将受到死区时间的影响。
2.3 误差补偿
根据以上的误差分析,需要对电流估算以及由PWM 死区时间引起的电压参考值和实际值之间的差值进行补偿。
死区补偿方法总体上分为两类,第一类是将因死区时间加入而损失的伏秒值在一个电流周期内做平均,然后将其加入到参考电压信号中,从而获得死区效应的补偿。第二类死区补偿方法基于脉冲的,即根据电机电流的极性,通过分析每个PWM 周期内因死区时间加入而损失的或增加的输出电压伏秒值,直接在本周期内补偿死区效应。
对电流估算的补偿,同样基于死区补偿方法,即在控制系统中加入死区补偿的计算模块,将电压参考值ud*、uq*减去电压补偿值来模拟实际的电压值ud、uq,作为电流估算的输入,这样就补偿了由PWM 死区时间引起的电流估算误差。
3 仿真及系统实现
运用Matlab/Simulink 模块库拼建控制模块,可以很方便的实现无电流传感器的永磁同步电机矢量控制系统的仿真。本系统主要可分为电机模块、SVPWM 模块、逆变模块、电流模块、坐标变换模块等,其中逆变模块采用Power System Block 模块组提供的模块,其他模块均是直接使用Simulink 自带的模型构建得到的。
按图3 所示框图搭建系统模型,永磁同步电机参数如下: 额定转速3000rpm,额定转矩2.4N·m,额定电流3.3A,最大电流10A,电压常数82K/Vrpm,p=4,La=20mH,r=4.8 欧;PWM 逆变器开关频率为16kHz,直流母线电压为 310V,PWM 死区时间2μs;速度环P=1000,I=20;电流环P=400,I=20;给定负载2.5N·m,给定转速1000rpm,2.5s 后切换到500rpm。

图3 无电流传感器的永磁同步电机控制系统仿真框图
从仿真结果来看,经过估算后,实际电流值可以很好的跟随给定负载及电流值;速度上升的很快,尽管有很小的超调,而且刚达到稳态时也有振荡现象,但没有稳态误差,速度得到了较好的控制。

图4 轴电流上升曲线
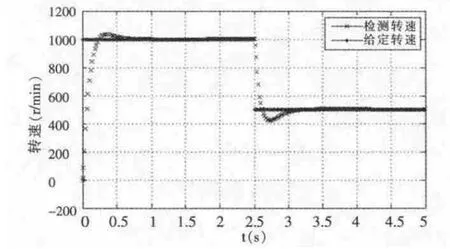
图5 转速跟踪曲线
4 结论
本文提出了一种新的无电流传感器的永磁同步电机系统的控制方法,并通过Matlab 对该方法进行了仿真研究,该方法经工程化检验合格之后,可以较好的应用于对实时性要求较高,有降低系统成本,但对控制精度要求相对不高的场合,具有很好的应用前景。
[1] 寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[2] 马小亮.高性能变频调速及其典型控制系统[M].北京:机械工业出版社,2010.
[3] 阮毅,陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2009.
[4] 陈坚.电力电子学:电力电子变换和控制技术[M].北京:高等教育出版社,2004.
[5] 张兴,张崇巍.PWM 整流器及其控制[M].北京:机械工业出版社,2012.
[6] 李发海,王岩.电机与拖动基础[M].北京:清华大学出版社,2005.
[7] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
