汽车TCS控制算法的研究
2014-01-21张慧娟张庆伟
王 磊,张慧娟,张庆伟
(1.河北农业大学 机电工程学院,河北 保定 071000;2.吉林大学 汽车工程学院,吉林 长春 130025)
0 引言
汽车的控制系统一般都包括三大组成部分,即控制算法、传感器技术和执行机构的开发。控制算法是控制系统的关键,它结合控制理论和汽车系统动力学的研究,寻求一个能够为汽车提供良好性能的控制规律[1]。
1 基本原理和控制目标
汽车在路面上行驶时,驱动力取决于发动机输出转矩,但行驶状况要受到轮胎与地面之间的附着极限的限制[2,3]。即:

式中: Fz—汽车行驶阻力;Ft—汽车驱动力;Fφ为路面附着力。
路面所提供的附着力与附着系数有关,在弱附着路面上,车轮在路面上的运动存在滚动和滑动两种情况,在驱动力控制系统中,用车轮滑转率δ 来表示车轮纵向运动中滑转所占的比例[4]:

式中: r—车轮的自由滚动半径;ω—车轮的转动角速度;v—车轮中心的纵向速度。
附着系数与滑转率的关系一般如图1 所示[5],有一个最佳的滑转率对应的附着系数最大,但是,随着滑转率增大,侧向附着系数迅速减小。因此,综合考虑纵向附着系数和侧向附着系数的利用率,一般应将车轮的滑转率控制在图中所示的范围内,大致在0.08~0.15 之间[6]。
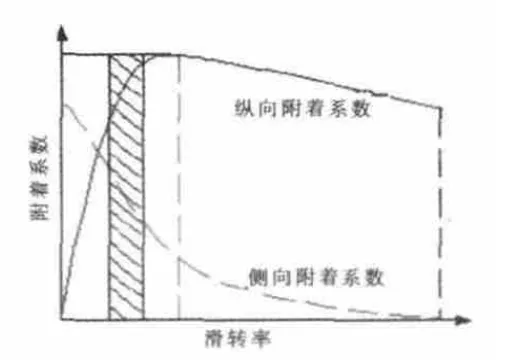
图1 附着系数与滑转率的关系曲线
2 TCS 的控制方式
驱动车轮滑转率的控制由驱动力控制系统的电子控制装置,通过各种方式对作用于驱动车轮上的力和力矩进行调节而实现。在轮胎和路面状况一定的条件下,车轮与路面之间的附着力Fφ取决于车轮载荷FG和其间的附着系数φ。作用于驱动车轮上的驱动力矩MT来源于发动机而经传动系变换和分配,在驱动力矩作用于驱动车轮的同时,也存在对驱动车轮施加的制动力矩MZ,故驱动车轮的受力情况如图2 所示。
对驱动轮做受力分析,可得:
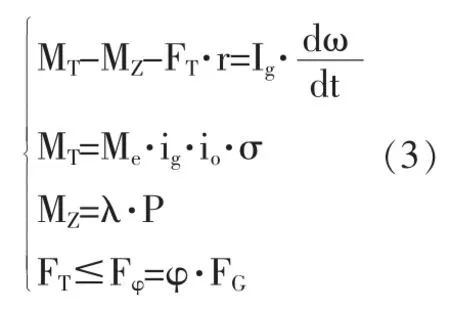
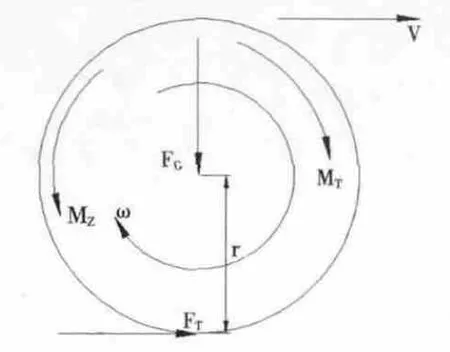
图2 驱动车轮的受力分析
式中: MT—作用于驱动车轮的驱动力矩;MZ—作用于驱动车轮的制动力矩;FT—作用于驱动车轮上的驱动力;FG—驱动车轮的载荷;σ—差速器的转矩分配系数;r—驱动车轮的滚动半径;Ig—驱动车轮及其关联部分的转动惯量;—驱动车轮的角加速度;λ—制动器的效能因数;P—驱动车轮制动器的制动压力;φ—驱动车轮的附着系数。
在忽略车轮的惯性矩时, 要使驱动车轮不发生滑转,则必须使驱动力矩小于附着力产生的力矩,即MT≤Fφ·r。所以:

式中: Me—发动机的输出转矩;ig—变速器的传动比;io为主减速器的传动比。
可见,增大驱动车轮的附着力是提高汽车起步加速性能和最高车速的必要条件。增大驱动车轮的载荷和附着系数均可以达到增大附着力的目的。控制驱动车轮滑转率可以使车轮与路面之间的附着系数保持在峰值附近,而控制驱动轮的滑转率又可以通过调节作用在驱动轮上的主动力矩在实现。所以,可以通过调节发动机的输出转矩Me、变速器的传动比ig、差速器的转矩分配系数σ、驱动车轮的载荷FG和驱动车轮制动器的制动压力P 来满足驱动车轮不滑转的条件。
3 TCS 的控制算法
驱动力控制系统常用的控制算法可分为三大类,包括经典控制方法、现代控制方法和智能控制方法,其中逻辑门限控制、PID 控制属于经典控制理论的范畴,最优控制、滑模变结构控制属于现代控制理论的范畴,模糊控制、神经网络控制属于智能控制理论的范畴。
3.1 最优控制算法
最优控制是指在给定的数学模型和初始条件下,选择一个表征过程的目标函数,决定一个最优控制函数,使给定系统从初始状态出发达到终止状态,并使性能指标具有极小值。最优控制擅长处理多输入-多输出系统以及高控制精度要求的复杂系统。汽车驱动力控制系统中最常用的是线性二次型性能指标来确定最优控制率:

式中,S 为n×n 半正定实阵,称为终端圈矩阵;Q为半正定或正定实阵,称为状态权矩阵;R 为正定实阵,称为控制权矩阵。
基于这一性能指标,建立发动机对外输出转矩的动态模型,以及发动机曲轴输出的转矩经离合器、变速器、输出轴、主减速器传递到差速器壳,这一传动过程的转矩传递和运动方程,再联立半轴到驱动轮转矩传递的动态方程,在一定的约束条件下,可以得到对滑转率控制的最优值或最优区域。但是,最优控制是一种基于模型、用状态空间在时间域内表示的控制方法,是建立在精确的数学模型基础上的,所以系统数学模型的精度对它的控制效果有着重要的影响,而在控制算法中的汽车系统数学模型是建立在对汽车动力系统简化基础上的数学模型,容易导致控制效果的不理想,所以,在驱动防滑系统中使用最优控制的还比较少。
3.2 滑模变结构控制
滑模变结构控制(Variable-Structure Control System with Sliding Mode) 是变结构控制中的一种控制策略,是一类特殊的非线性控制方法。滑模变结构控制是一种不连续控制,根据系统当时的状态、偏差及其导数值,在不同的控制领域,以理想开关方式切换控制量的大小和符号,使系统在切换线临近区域来回运动,直到系统状态的运动成了沿切换线的滑动,即沿规定的状态轨迹作小幅高频的上下运动(被称为滑模运动),因此,可以使控制者与被控对象系统的动力学变化、参数变化及外部扰动具有全部的和较强的不敏感性,也就是具有良好的“鲁棒性”[7,8]。
驱动轮的滑转率与路面条件、汽车的运行状态、汽车的驱动形式以及驾驶员的操作等因素有关。而这些因素又具有明显的时变性、非线性和不确定性,这就要求所采用的控制理论应该具有鲁棒性。
3.3 模糊PID 控制算法
模糊控制方法是将精确的数字量转换成模糊集合的隶属函数,然后根据控制量制定的模糊规则,进行模糊逻辑推理,得到一个模糊输出隶属函数,最后根据推理得到的隶属函数,用不同的方法找出一个具有代表性的精确值作为控制量,加到执行器上实施控制。模糊控制易于实现对时变非线性对象的控制,而且不需要知道被控对象的数学模型;对于被控对象特性参数变化具有较强的鲁棒性,对被控对象的干扰具有较强的抑制能力。
汽车驱动力控制的主要目的是将驱动滑转率控制在最佳工作滑转率附近,最佳滑转率用δ0表示,实际的滑转率用δ 表示,则E=δ-δ0即为偏差值,根据偏差值E 和偏差变化率C(E)进行驱动转矩MT的综合控制。由于和C(E)均是精确的计算量,因此需要模糊化。建立滑转率的模糊控制器,根据滑转率的变化由模糊控制器自动调节驱动转矩,使实际滑转率δ 趋近于滑转率的理想值δ0。
模糊PID 控制的设计主要包括两个方面: 一是模糊控制器和常规PID 的混合结构;二是常规PID 参数的模糊自整定技术。
当被控过程的稳态增益已知或可以测量Kp,那么积分作用就没有必要了,如图3(a)所示,这种情况下模糊逻辑控制器的输出规律为:

如果Kp未知,则积分项不可缺少,将传统的积分控制器并联到模糊PD 控制器中以构成混合结构,其中积分控制器输出ui=KiΣe,其中Ki是积分增益,如图3(b)所示。
为了控制效果更好,将积分增益Ki进行模糊化处理,则可以得到模糊PD 与模糊PI 的合成控制,如图3 (c)所示。那么模糊PID 控制器的总输出值为:


图3 模糊PID 控制原理图
3.4 神经网络控制算法
神经网络控制在自动控制领域应用中,具有并行性、自学习自组织性、容错性、联想性的特点,并且不需要精确的数学模型,便其能够处理复杂的、不确定的和非线性的问题。神经网络算法鲁棒性强,适用于确定非定常、非线性的多输入多输出系统的输出与输入间的关系。
吉林大学课题研究组曾针对神经网络控制的特点,将神经网络控制算法应用到TCS 的控制过程中,通过建立BP 神经网络控制器分别对节气门开度和驱动轮制动压力进行控制,得到了理想的控制效果[9]。
但传统的BP 学习控制算法的训练速度是相当慢的,而对BP 算法改良后的快速BP 算法可以不通过计算Hessian 阵来估计误差函数的二次导数信息,并利用该信息来改善BP 算法的收敛性。用△ωij(k)表示第k 步的梯度函数,则其权值更新为:


图4 神经网络的拓扑结构图
4 结论
通过对TCS 工作原理的分析,可以得出几种控制算法的控制对象,虽然都是车轮滑转率,但是由于控制算法和执行器的控制方式不同,改善滑转状况的过程以及适应的控制环境也就不同。在实际的汽车TCS 上,应该根据实际的需求状况,选择合适的控制算法或几种控制算法相结合,以优化TCS 的控制效果。
[1]Beyer K,Krueger E,Sonnenberg M.Delphi automitive systems enhanced vehicle stability with engine drag control. Vehicle Dynamics and Simulation,2002,3.
[2] 喻凡,林逸.汽车系统动力学[M]. 北京:机械工业出版社,2011.
[3] 彭金栓,徐磊,邵毅明.汽车主动安全技术现状及发展趋势[J]. 公路与汽运,2014,1.
[4] 邓国辉.转弯制动时ABS 控制算法研究及对汽车侧向稳定性的改进[D]. 吉林大学硕士学位论文,2009,5.
[5] 宋健,王伟玮,李亮,于良耀.汽车安全技术的研究现状和展望[J].汽车安全与节能学报,2010,2.
[6] 王国业等.汽车ABS 在对开路面上的弯道制动性能[J].北京理工大学学报,2006,4.
[7] 彭金栓,付锐,郭应时.基于驾驶人视觉特性的换道意图识别方法[J].武汉理工大学学报,2013,3.
[8] 熊峰.混合动力汽车TCS 控制策略的研究[D]. 重庆理工大学硕士学位论文,2012,6.
[9] 李亮,康铭鑫,宋健,等.汽车牵引力控制系统的变参数自适应PID 控制[J].机械工程学报,2011,12.