高速摄像技术在驱动线落棒实验中的应用
2014-01-19张朝柱顾汉洋陈宇清周肖佳
张朝柱 顾汉洋 刘 刚 陈宇清 周肖佳
1(上海交通大学 核科学与工程学院 上海 200240)
2(上海核工程研究设计院 上海 200233)
高速摄像技术在驱动线落棒实验中的应用
张朝柱1顾汉洋1刘 刚2陈宇清2周肖佳2
1(上海交通大学 核科学与工程学院 上海 200240)
2(上海核工程研究设计院 上海 200233)
控制棒落棒性能分析是驱动线设计验证的重要部分。本文在AP1000控制棒驱动线落棒实验中,应用高速摄像仪拍摄落棒历程,并提出了一种结合数字图像相关和亚像素插值的方法,用于处理拍摄的图像。基于此种方法,获得了精确的控制棒棒位-时间、速度-时间、加速度-时间曲线,有利于验证和改进控制棒驱动线设计。
控制棒驱动线,落棒特性试验,高速摄像仪,数字图像相关,亚像素插值
控制棒驱动线是反应堆控制系统的执行机构,其主要功能是带动控制棒组件上升和下插,实现对反应性的控制。在AP1000反应堆国产化过程中,必须对落棒特性进行全面评价,为控制棒驱动线的设计、优化提供依据。其中,进行冷态控制棒驱动线落棒试验,通过试验获取控制棒落棒过程中的时程曲线是对落棒性能进行评价的重要内容。在以往的落棒试验中,常采用棒控棒位探测系统测量控制棒下落过程中的感应电势[1],间接测量落棒速度,分别对落棒速度-时间曲线进行积分或微分计算[2],得到棒位-时间曲线和加速度-时间曲线,但该方法受环境影响较大。高速摄像技术采用非接触式测量,不会影响流场和驱动机构,并能够获得直观的落棒过程。何军山等[3]较早采用高速摄像仪对落棒特性进行测量,通过对高速摄像仪拍摄的图像进行人工处理,获得驱动线落棒过程中的位移、速度、加速度等重要的落棒特性数据,但人工处理方法有很多缺陷和不足,其过程耗时且精度较低,存在较高的出错概率,且无法获得机电延迟时间。本文基于高速摄像技术,采用相关系数法结合亚像素插值法编制MATLAB程序,对落棒图像进行自动化处理,大大提高测量精度和处理效率,弥补了人工处理的不足。采用该方法获得棒位-时间、速度-时间和加速度-时间曲线。
1 实验简介
试验在上海交通大学热工水力试验室的控制棒驱动线落棒试验装置上进行。该试验装置取AP1000一组模拟控制棒组件进行试验。在上部导向筒的外部筒体上设置可视窗,采用高速摄像仪拍摄驱动杆的运动图像,如图1所示。为了保持断电落棒起始时刻与高速摄像图像采集的同步,由落棒控制系统给出触发信号,高速摄像仪由该触发信号触发启动摄像并作为落棒的起始时间点。

图1 实验装置示意图Fig.1 Schematic diagram of experiment layout.
2 图像处理方法
本文使用高速摄像获得落棒运动图像,采用相关系数法结合亚像素插值法获得高精度的落棒时程曲线。高速摄像仪采样频率为2 kHz,图像分辨率为512×384 ppi。使用镁光灯作为光源,光源亮度根据每次试验环境不同有所差别,光源调节的标准是通过人眼判断图像是否清晰。确保关注区域完整、图像对焦准确、定位特征清晰即可满足试验要求。控制棒驱动杆上段有265个齿槽,齿槽在高速摄像图像中形成明暗条纹,以齿作为定位特征(图2)。下段是黑色光杆,用白漆在其上画出了一系列大致等距的刻线作为标记,白线即为定位特征(图3)。在数字图像处理中,为了能够检测出定位特征,提出了一些经典的检测算子,如LOG算子、Sobel算子、Canny算子[4]等,这些算子形式简单,易于实现,可对图像特征完成像素级精度的边缘定位。本文借鉴了边缘检测的思想,截取了高速摄像图像中的运动对象区域,并使用数字图像处理技术中腐蚀和膨胀的方法对截取的图像进行处理(图4)。图像的腐蚀是为了提取骨干,膨胀是为了加粗轮廓,使用这两种算法有两个相反的结果:(1) 提取出关心的图像特征,并最大限度去除其他部分的图像,使用膨胀可以进一步加强提取出的图像特征,这样做可以减少粗大误差;(2) 使用这两种算法虽然不会改变定位特征的位置,但会对定位特征的边缘有轻微改变,引入一些误差。相比之下,由于图像边缘的轻微改变引入的误差远小于减少的粗大误差,所以采用这种方法是合适的。在本文中,这种方法能够很好地提取出定位特征,并且相比经典的边缘检测更加简单。在确定定位特征后,便可以使用相关系数法获得速度-时间曲线。图4给出了经过截取、处理的连续四帧图像,从图像序列中可以看出定位特征的微小移动。

图2 齿槽Fig.2 Cogging on the drive rod.
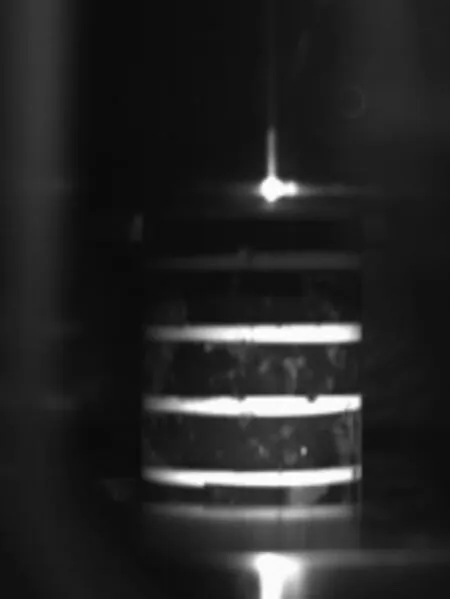
图3 光杆上的白线Fig.3 White lines on straight rod.
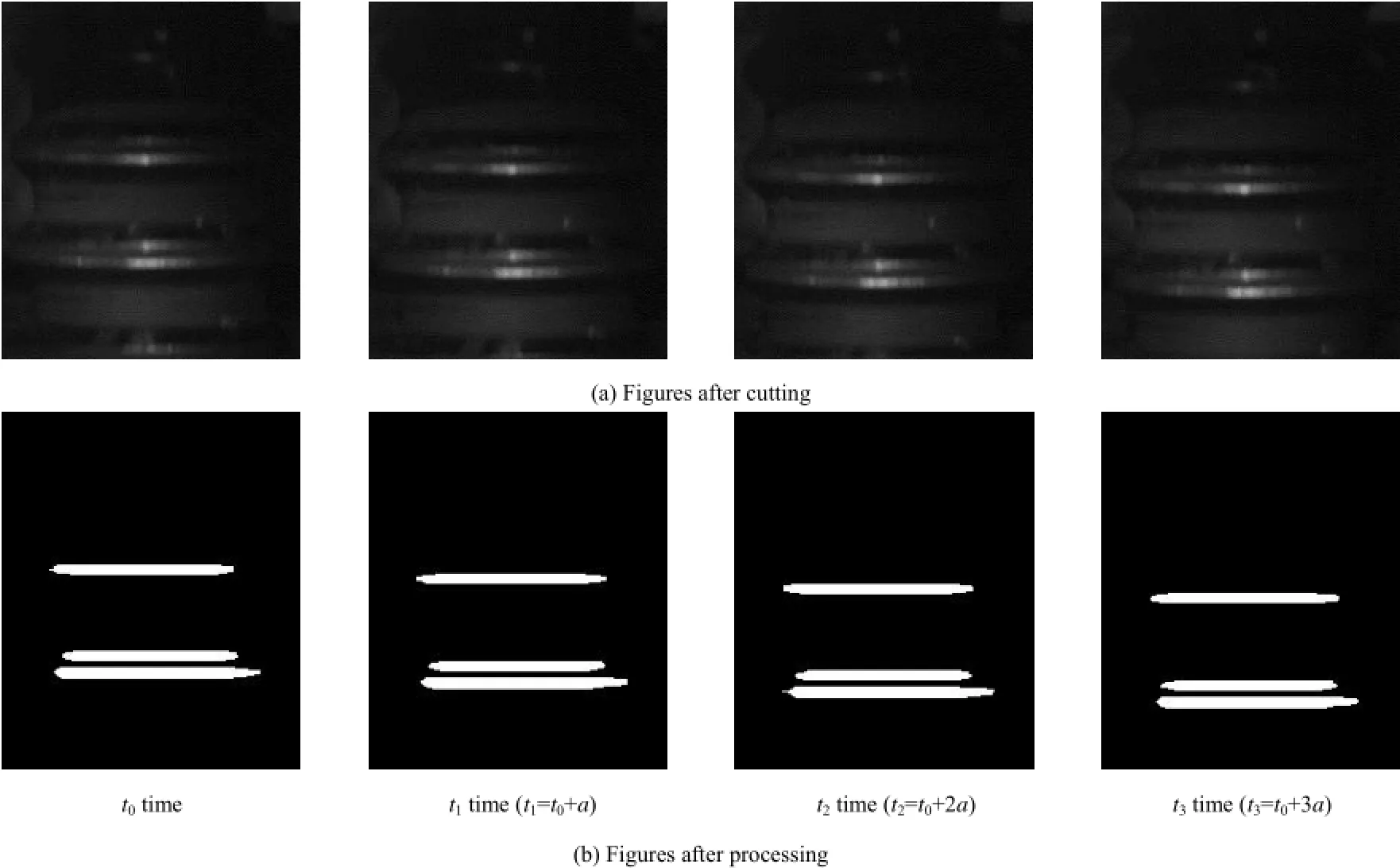
图4 经过截取、处理的连续四帧图像Fig.4 Four successive figures after cutting and processing.
相关系数法的基本原理是基于互相关函数的相关特性,用互相关函数来描述评价多幅图像之间的相似程度[5]。进行数字图像相关运算时假定白光光源照明物体时,物体表面反射光强G(x,y)的关系分布与物体表面有一一对应关系。据此,可以通过测量相邻两幅图像中同一特征的位移量,获得微小时间间隔内驱动杆的位移,对此段微小位移进行差分就得到速度。
首先,程序读取两幅相邻的图像,按时序先后分为图像1和图像2,图像1作为基准图像,搜索找到图像1中的一个定位特征(齿槽或白线)中心,在特征中心附近取一子区,该子区用像素的灰度矩阵表示,作为样本图像,然后将样本图像在图像2(目标图像)上对定位特征进行相关匹配搜素。本文使用了标准化互相关算子NCCO[6]。标准化互相关算法的准则定义为:设基准图为G,基准图中以定位特征为中心,大小为Ms×Ns的子区为Gs(即样本图像),目标图像为Gr,目标图像中与样本图像同样大小的一块子区为Gr(u,v),(u,v)为该子区的左上角坐标,Gr(u,v)与Gs建立的相似度函数如下:


图5 相关曲线Fig.5 Correlation curve.
由于数字图像记录的是离散灰度信息,利用式(1)的相关函数来进行相关搜索时窗口的平移只能以整像素为单位来进行,所能获得的位移v是像素的整数倍,称为位移v具有整像素级精度。本文中拍摄的图像的比例尺为1:0.2(图中一个像素宽度对应实际物理距离0.2 mm),因此位移的最小精度为0.0002 m,相应的速度最小精度为0.0002× 2000=0.4 m·s-1(拍摄频率为2 kHz),此速度精度较低,可以使用亚像素插值法进一步提高精度。
雷鸣等[7]较早提出了一种基于互相关的图像匹配亚像素定位方法,该方法具有运算简单、精度高、强适应性及强抗干扰能力等优点。本文借鉴了该方法,使用抛物线对相关曲线进行插值。该方法的原理是:假设相关峰附近的曲线满足抛物线方程y=ax2+bx+c,则系数a、b、c可以由相关峰附近相邻三个点的坐标值确定。假设用相关系数法求得的最大相关系数为y0,其横坐标为x0,则满足y0=ax02+bx0+c,取附近的两个点(x1,y1)、(x2,y2)组成方程组:
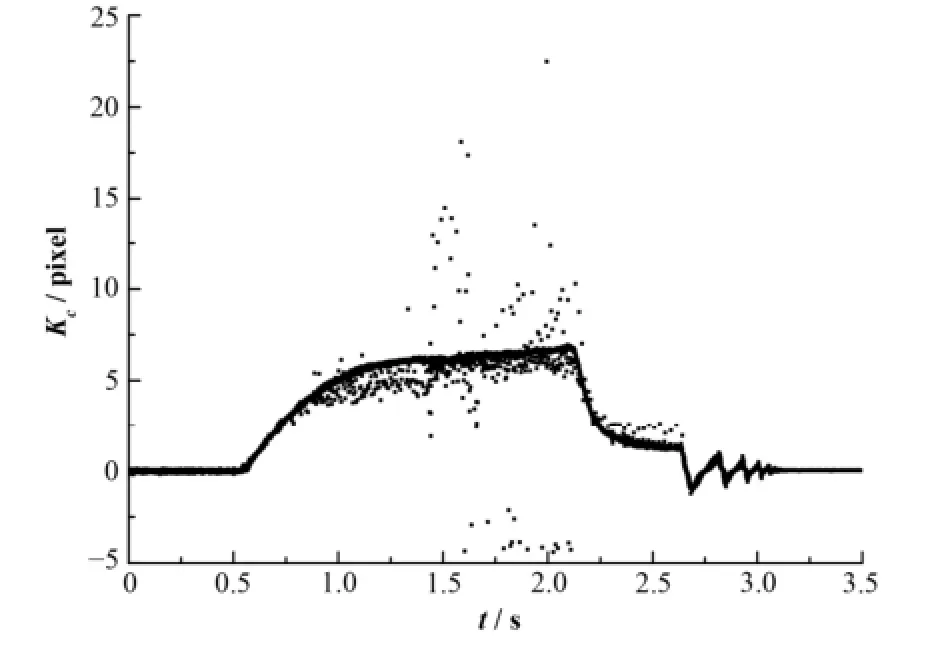
图6 Kc-时间曲线Fig.6 Kc-time curve.
解此方程组可以确定系数a、b、c。抛物线y=ax2+bx+c的最高点,就是新的相关峰。假设相关峰的坐标为(xc,yc),这样求出相关峰的横坐标xc的最小精度可达0.1-0.01个像素,称为xc具有亚像素级精度(对于图5,xc=12.542,速度的最小精度为0.004 m·s-1,比整像素精度提高了100倍)。通过亚像素插值,大大提高了定位精度。假设用亚像素插值法求出定位特征在相邻两帧图像间的位移为Kc个像素,则控制棒驱动杆的实际位移Sc=(Kc×0.2146) /1000 m,对位移进行差分可得到该时刻的落棒速度v=(Kc×0.2146)/[1000×(1/2000)] m·s-1。图6给出了Kc-时间曲线。
3 处理结果及误差分析
图7给出了基于上述图像处理方法得到的某实验工况下驱动线落棒过程的速度-时间曲线,从图7中可以看出,速度-时间曲线上存在一些较大毛刺,这些毛刺误差来源包括:(1) 实验过程中拍摄对象或高速摄像的晃动;(2) 高速摄像拍摄过程中的环境噪声;(3) 图像处理过程中搜索定位特征以及使用相关系数法计算微小位移时产生的误差。第一种误差可以通过平滑速度-时间曲线基本去除,后两种误差理论上可以通过标绘更加清晰的定位特征(如在光杆部分标绘更加清晰的白线),增大采样频率和图像分辨率的方法减小。

图7 落棒行程速度-时间曲线Fig.7 Velocity-time curve.
数字滤波可以抑制有效信号中的干扰成分,消除随机误差,同时对信号进行必要的平滑处理,以保证测得的数据的准确性。本文使用分位数滤波(Percentile Filter)方法[8]对速度曲线进行平滑滤波,很好地去除了速度-时间曲线的毛刺,同时保持数据的准确性。图8是平滑处理后速度-时间曲线。
对平滑后的速度-时间曲线进行积分,可以获得棒位-时间曲线,如图9所示。对平滑后的速度-时间曲线进行差分,可以获得加速度-时间曲线,如图10所示。
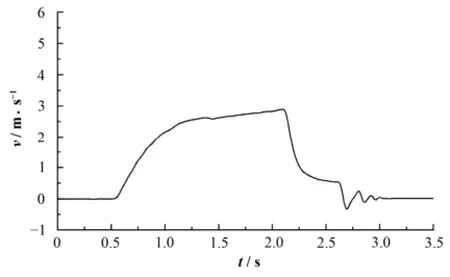
图8 平滑后的落棒行程速度-时间曲线Fig.8 Velocity-time curve after smoothing.
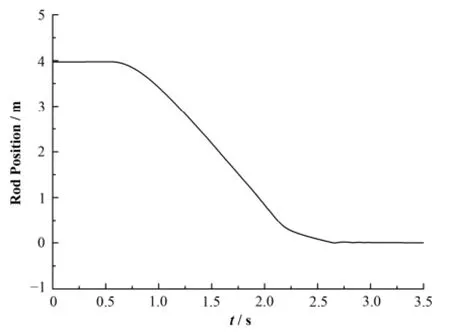
图9 落棒行程棒位-时间曲线Fig.9 Rod position-time curve.
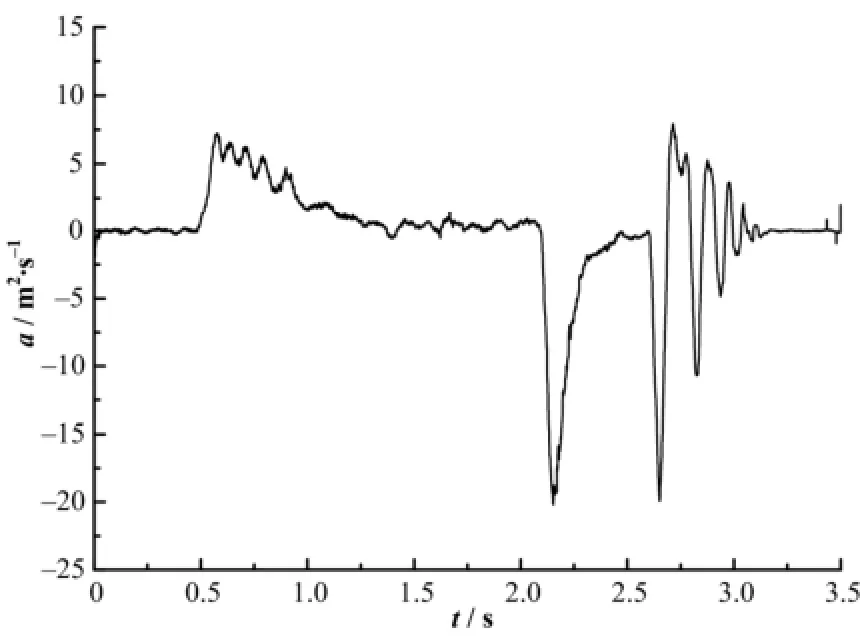
图10 落棒行程加速度-时间曲线Fig.10 Acceleration-time curve.
结合图8、图9、图10可以看出,落棒行程组成为:驱动机构释棒、驱动线落棒、缓冲段停棒[9]。驱动机构释棒阶段:落棒信号产生,经过一段机电延迟时间后控制棒开始下落,表现为加速度突然增大;驱动线落棒阶段:控制棒开始下落,加速度从零迅速增大到最大值,速度逐渐增大,随着速度增大,流动阻力增大,因此加速度逐渐减小趋向于零,速度逐渐增大到最大值,当控制棒下落到缓冲段入口,速度和加速度迅速减小,表现为速度-时间曲线拐点;缓冲段停棒阶段:控制棒进入缓冲区,加速度迅速减小为负数,速度也迅速减小,随着速度减小,流动阻力减小,加速度从最小值逐渐增大,当加速度增大到零时,速度减小到一个新的值并保持此速度继续下落,当接触堆底后控制棒经过数次反弹停在堆底。
4 适用范围及不足
本文详细介绍了通过高速摄像技术结合数字图像处理和相关系数法获得落棒历程速度-时间曲线的方法,该方法采用非接触式测量,不会影响流场和驱动机构,并能够获得直观的落棒过程,通过积分和差分运算,可以进一步获得棒位-时间曲线和加速度-时间曲线,该方法可广泛应用到控制棒驱动线落棒实验中。
理论上该方法具有较高精度(速度最小精度可达0.004 m·s-1),但因不能获得棒控棒位探测系统测量的控制棒下落过程中的感应电势变化曲线,所以无法对此方法进行标定,更进一步的标定工作需要和感应电势曲线比较后完成。
5 结语
本文采用高速摄像仪拍摄驱动线落棒实验中驱动杆下落过程,获得驱动杆下落过程的连续图像序列,并结合数字图像相关系数法与亚像素插值法,对数字图像序列进行后处理。将该方法应用到AP1000控制棒驱动线落棒实验中,获得了完整的驱动线落棒历程棒位-时间、速度-时间和加速度-时间曲线。
结果表明:(1) 采用非接触式测量,不会影响流场和驱动机构,并能够获得直观的落棒过程;(2)采用数字图像处理技术对落棒行程的序列图像进行处理,可以获得完整的高精度的驱动线落棒历程棒位-时间、速度-时间和加速度-时间曲线,便于分析落棒特性;(3) 采用自动化处理,大大缩短了图像处理时间,同时避免了人工处理引入的误差。
1 李刚, 柴伟东, 张大勇, 等. 落棒试验对控制棒状态的监测与预警[J]. 核科学与工程, 2012, (S1): 53-56, 62
LI Gang, CHAI Weidong, ZHANG Dayong, et al. Monitoring and early warning of control rod state in rod drop test[J]. Nuclear Science and Engineering, 2012, (S1): 53-56, 62
2 钟艳敏, 王源, 付仿松. 秦山核电二期工程反应堆控制棒落棒性能测试[J]. 核动力工程, 2003, (S1): 221-223
ZHONG Yanmin, WANG Yuan, FU Fangsong. Prediction analysis for first startup ohysics test for unit 1 of Qinshan phase II NPP project[J]. Nuclear Power Engineering, 2003, (S1): 221-223
3 何军山, 蒋贤国, 黄兆庆, 等. 高速摄像仪在落棒试验中的应用及展望[J]. 核动力工程, 2007, 28(4): 125-127
HE Junshan, JIANG Xianguo, HUANG Zhaoqing, et al. Application and prospect of high-speed digital camera in control rod drive line characteristic experiment[J]. Nuclear Power Engineering, 2007, 28(4): 125-127
4 Canny J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(6): 679-698
5 杨勇, 王琰蕾, 李明, 等. 高精度数字图像相关测量系统及其技术研究[J]. 光学学报, 2006, 26(2): 197-201
YANG Yong, WANG Yanlei, LI Ming, et al. Research of high-accuracy digital image correlation measurement system[J]. Acta Optica Sinica, 2006, 26(2): 197-201
6 Brown L G. A survey of image registration techniques[J]. ACM Computer Surveys, 1992, 24(4): 325-376
7 雷鸣, 张广军. 基于互相关的图像匹配亚像素定位[J].光电工程, 2008, 35(5): 108-113
LEI Ming, ZHANG Guangjun. Image orientation algorithm with subpixel accuracy based on correlative matching method[J]. Opto-Electronic Engineering, 2008, 35(5): 108-113
8 王国胜, 李密生, 岳小云. 基于差分法的分位数算法在数字滤波中的应用[J]. 探测与控制学报, 2007, 29(2): 46-49
WANG Guosheng, LI Misheng, YUE Xiaoyun. Application of a synthesis algorithm based on difference and fractile methods in digital filter system[J]. Journal of Detection & Control, 2007, 29(2): 46-49
9 周肖佳, 毛飞, 闵鹏, 等. 压水堆驱动线落棒历程计算[J]. 原子能科学技术, 2013, 47(9): 1584-1589
ZHOU Xiaojia, MAO Fei, MIN Peng, et al. Calculation of drop course of control rod assembly in PWR[J]. Atomic Energy Science and Technology, 2013, 47(9): 1584-1589
CLCTL364
Application of high-speed digital camera in control rod drive line drop performance experiment
ZHANG Chaozhu1GU Hanyang1LIU Gang2CHEN Yuqing2ZHOU Xiaojia2
1(School of Nuclear Science and Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
2(Shanghai Nuclear Engineering Research & Design Institute, Shanghai 200233, China)
Background:Control rod drop performance is essential for safety analysis of nuclear power plant.Purpose:To validate the design of control rod drive line (CRDL), a high-speed digital camera is used to record the control rod drop course in AP1000 CRDL drop performance experiment.Methods:The recorded video images are analyzed by a digital image processing method which includes digital image correlation and sub-pixel algorithm.Results:Based on such approach, the relationships of control rod’s position, velocity and acceleration with time are obtained.Conclusion:This approach has high accuracy theoretically and will be useful for validating and improving the design of CRDL.
Control rod drive line (CRDL), Drop rod performance, High-speed digital camera, Digital image correlation, Sub-pixel algorithm
TL364
10.11889/j.0253-3219.2014.hjs.37.090603
张朝柱,男,1989年出生,2012年毕业于上海交通大学,研究领域为核工程与核技术
2014-04-23,
2014-05-27
