卫星导航系统综合仿真平台设计
2014-01-16黄智刚韩春阳
陈 杰,黄智刚,李 锐,韩春阳
(1.北京航空航天大学 电子信息工程学院,北京 100191;2.北京卫星导航中心,北京 100094)
1 引言
目前,全球卫星导航系统(global positioning system,GPS) 的开放服务定位精度为10 m左右[1],尚不能满足对精度和可靠性要求高的用户需求,系统性能的提升技术已经成为卫星导航领域的研究热点之一,其中差分增强技术作为有效提升全球卫星导航系统性能的手段之一,大大推动了全球卫星导航系统在不同领域的应用。差分增强技术根据服务区域的范围分类,可分为广域和局域,根据观测值分类,可分为基于码伪距的差分增强和基于载波相位的精密定位,典型代表分别为广域增强系统(wide area augmentation system, WAAS)、全球差分GPS系统(global differential GPS, GDGPS)、局域增强系统(local area augmentation system, LAAS)和连续运行参考站(continuously operating reference stations, CORS)。
为了便于测试分析和缩短研发周期,科研单位和商业机构开发了多种仿真平台,按照输出方式可以分为射频信号输出和纯数字输出两类。输出射频信号的典型仿真平台是美国思博伦(Spirent)公司的GSS8000系统,该系统在控制器计算机上运行SimGEN软件并通过信号发生器提供射频输出信号,可用于单个接收机的测试。受限于计算机硬件,组网的多台机箱无法实现时钟的纳秒级同步,无法实现系统级仿真。纯数字输出的仿真平台能够克服时钟同步的问题,欧洲航天局(European space agency,ESA)开发的伽利略系统仿真工具(Galileo system simulation facility, GSSF)[2]可配置星座、监测站和用户,具备卫星可视性、监测站覆盖深度等初步分析功能。然而GSSF仅能按照仰角配置用户等效测距误差,无法单独配置各个伪距误差影响因子,此外用户段只支持静态用户或者区域网格,未提供用户接收机动态模拟功能,限制了用户定制仿真场景的深度。用户获得ESA授权才能使用GSSF,进一步限制了其应用范围。
本文设计了面向差分和完好性研究需求的全球卫星导航系统综合仿真平台,能够灵活深入配置仿真参数,特有完好性故障仿真功能,具备用户接收机多类型运动能力,采用接收机自主交换格式[3](receiver independent exchange format, RINEX)和标准产品3轨道格式[4](extended standard product 3 orbit format, SP3-c)输出,向用户插件开放数据接口,支持差分增强技术的系统级和用户级仿真数据生成与分析。
2 总体设计
全球卫星导航系统综合仿真平台主要用于卫星导航系统的数字仿真,为差分增强技术研究提供高逼真度的数据源。该平台允许用户通过文本和图形界面两种方式灵活配置星座、伪距误差、监测站和用户接收机等参数,具备完好性故障仿真的功能,按照普遍采用的RINEX和SP3格式输出仿真数据,开放数据接口提高平台可拓展能力。
该仿真平台采用模块化设计,分为五大模块:控制模块、交互模块、数据库模块、运算模块和输出模块,五大模块的内部结构及模块间关系如图1所示。

图1 全球卫星导航系统综合仿真平台
交互模块包括文本文件读取模块和图形界面交互模块,前者负责从文本读入星座和监测站配置信息,后者用于实现选择卫导系统和查看卫星参数、查看和编辑监测站参数、设定用户接收机类型和运动状态参数、配置伪距误差模型参数、配置完好性故障参数、设定仿真时间等功能。
数据库模块用于存储、读取和修改卫星数据库、伪距误差模型数据库、监测站数据库、用户接收机数据库和完好性故障数据库。卫星数据库包含星座、名称、轨道、时钟等参数,伪距误差模型数据库包含星历、星钟、电离层、对流层、接收机钟差、热噪声及多径误差等模型参数,监测站数据库包含名称、位置、时钟、观测高度截止角等参数,用户数据库包含位置、运动状态、接收机观测类型等参数,完好性故障数据库包含星历故障、星钟故障、电离层风暴、监测站故障的起止时间和故障模型参数。
运算模块包括伪距误差模型、完好性故障模型和用户接收机动态模型。伪距误差模型分为星钟误差模型、星历误差模型、电离层误差模型、对流层误差模型、接收机钟差模型和热噪声及多径误差模型,用于模拟信号从产生到接收运算过程中的关键影响因素。完好性故障模型分为星历故障模型、星钟故障模型、电离层风暴模型、监测站时钟故障模型和接收机单通道故障模型。用户接收机动态模型用于生成用户接收机的实时位置,并计算多普勒频移对观测值的影响。
输出模块负责输出仿真结果。为了便于数据交换,该平台采用标准格式输出数据:根据RINEX 2.10格式输出导航电文和观测数据,其中每个监测站包含3台接收机,经过一致性校验后输出2台接收机的观测数据,观测类型包括多个频点的码伪距和载波相位;根据SP3-c格式输出精密星历。此外能够以动画形式演示星下点轨迹。
控制模块实现仿真平台整体控制,提供接口用于各模块间数据交换。此外,控制模块具备调用用户插件的功能,预置了格网电离层垂直误差(grid ionospheric vertical error,GIVE)、接收机自主完好性监测 (receiver autonomous integrity monitoring,RAIM)、用户测距精度(user range accuracy, URA)、用户差分距离误差(user differential range error, UDRE)和监测站覆盖深度等插件的按钮。
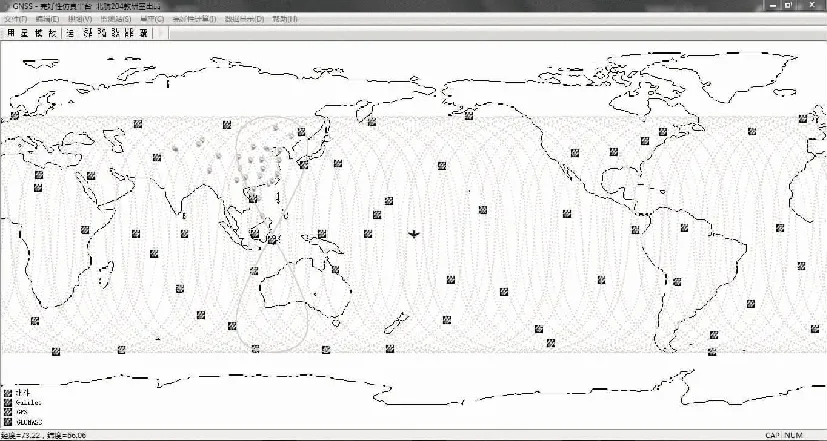
图2 仿真平台界面(BDS和GPS双系统)
3 关键技术
3.1 参数配置灵活
差分增强系统一般针对特定的卫星导航系统向一定区域内用户提供服务,大气条件、接收环境根据区域不同而存在差异。为了满足用户深入便捷定制仿真场景的需求,该平台向用户提供了文本和图形化界面两种方式,允许用户配置星座、伪距误差、监测站和用户接收机等参数。
星座参数可通过图形界面和文本两种方式配置,图形界面提供卫星系统选择、卫星信息查阅功能,文本包含卫星的名称、健康状况和轨道参数。该平台预置我国的北斗卫星导航系统(BeiDou navigation satellite system, BDS)、美国的全球定位系统(global positioning system,GPS)、俄罗斯的格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)和欧盟的伽利略卫星导航系统(Galileo navigation satellite system,Galileo)的星座配置文本。
伪距误差模型参数可通过图形界面配置。星钟误差模型采用高斯马尔科夫模型,可配置参数为天稳定度、秒稳定度、初始频偏、初始钟偏;星历误差模型采用高斯马尔科夫模型,可配置参数为相关时间、采样间隔和星历误差标准差;电离层误差模型采用Klobuchar模型[5],可配置参数分为生成参数和广播参数两部分,预置太阳黑子平静期和活跃期两组参数;对流层误差模型采用WAAS的对流层模型[6],可配置不同纬度区域的对流层参数;接收机钟差模型采用原子钟模型[7],可配置参数为初始频偏、初始钟偏和采样间隔;热噪声及多径误差模型采用WAAS的热噪声和多径模型[6]。该平台以实测数据为依据预设各个模型参数。
监测站参数配置方式分为文本和图形界面两种方式,文本仅包含监测站的名称、类别、健康状况和经纬高,图形界面显示的监测站信息除了文本文件所含内容外,还包括监测站时钟初始钟差和频差、对流层延迟干分量和湿分量,用户还可通过直接点击主界面地图实现新建、删除和编辑监测站信息。该平台预置中国区域27个监测站配置文本。
用户接收机参数通过图形界面配置,可配置参数包括初始经纬高、单频或双频接收机、接收机高度截止角和用户运动信息,用户运动类型可分为静止、匀速直线和匀速圆周运动三类。
3.2 完好性故障仿真
差分增强系统通过播发完好性信息来提升卫星导航系统的可靠性,当卫星导航系统出现故障或某项运行参数偏差过大,使系统提供的定位结果超出规定限值时,增强系统需及时发现并及时通告用户。
为了满足用户分析差分增强技术对完好性风险处理能力的需求,该平台设计了完好性故障仿真功能。根据实测数据分析可知,星钟误差、星历误差和电离层误差是导致完好性风险的主要因素,此外接收机钟差也会导致定位结果超差。因此将完好性故障分为卫星故障、电离层风暴和监测站故障三类,可单独设定每一类故障的起止时间。

(1)

Ik=IKlobuchar+IError
(2)
监测站故障分为监测站时钟故障和接收机单通道故障,用户可对每一个监测站单独设定时钟故障etk和接收机通道故障。在监测站故障有效期间,由于监测站的3台接收机时钟共源,时钟故障叠加到每一台接收机的观测量。
tk=tk|k-1+etk
(3)
接收机天线间距离较近,因此接收机单通道故障可由一致性检验算法检出,仅输出无故障的2台接收机数据。
3.3 平台可扩展
为了提高该平台的可扩展性,便于用户在该平台基础上开展后续研究工作,用户自定义插件可通过该平台开放的数据接口,获取卫星数据、伪距误差模型数据、监测站数据、用户接收机数据和完好性故障数据,可按照RINEX格式和SP3格式读取该平台输出数据。程序预留了GIVE、RAIM、URA、UDER和监测站覆盖深度等5个插件按钮,用户可直接点击调用相应的插件。
以“监测站覆盖深度分析”插件为示例,该插件通过数据接口获取该平台预置的GPS星座和27个监测站,完成监测站覆盖深度分析,分析结果如图4所示。

图4 监测站覆盖深度插件示例
4 性能测试
该平台旨在为差分和完好性研究提供规范逼真的数据源,因此需要对其进行性能测试,以确保该平台输出数据达到接收机实测数据的性能,并可满足差分增强技术仿真需求。对于用户接收机端完好性算法而言,并不关心各误差源分量的特性,只关心伪距残差的整体数学特征,并且性能测试以定位误差为评估标准。GrafNav是美国NovAtel公司开发的全球卫星导航系统(global navigation satellite system, GNSS)后处理软件,具备高精度定位和长距离实时动态差分法(real-time kinematic,RTK)解算能力,本节利用GrafNav 8.40在定位域上对该平台输出数据进行性能分析。
4.1 静态单点定位
为了验证该平台输出数据符合标准、分析输出数据的定位精度,进行了静态定位测试。以BJFS站在2012-01-01的观测数据为对比,在仿真平台中添加与BJFS站相同坐标的监测站BEIJ,仿真时长为1 d,采样间隔为30 s,均为双频接收机。
首先,利用GrafNav进行基本定位,如图5所示,左侧为仿真数据定位结果,右侧为实测数据定位结果,可以得到如下结论:
其一,定位误差相近:仿真数据定位落在半径为6 m的圆内(99%),实测数据定位落在半径为6 m的圆内(99%)。
其二,定位分布存在差异:仿真数据定位呈条状,实测数据定位呈散点状。星历误差和星钟误差是定位的主要误差源,该平台采用马尔科夫模型,前后时隙相关性较强,难以逼真地模拟真实误差。

图5 基本定位对比
随后,利用GrafNav进行精密单点定位(precise point positioning,PPP ),PPP利用精密星历消除轨道误差和星钟误差对定位的影响,电离层延迟、对流层延迟、接收机钟差等因素对定位结果起主导作用。如图6所示,左侧为仿真数据精密定位结果,落在半径为0.5 m的圆内(99%),右侧为实测数据精密定位结果,落在半径为0.3 m的圆内(99%)。由此可知,仿真数据定位结果略差于实测数据定位结果相比,但都显示出条状的分布特性。

图6 精密单点定位对比
通过分析基本定位和精密单点定位的结果可知,该平台接收机输出数据规范有效,在静态条件下与实测数据的定位性能相当。
4.2 动态差分增强
为了验证该平台可支持差分增强技术研究,进行了动态差分增强仿真。模拟民航飞机航路区飞行进行分析,以监测站BEIJ为基准站,飞机起始位置为(115.0°E,39.6°N),飞行高度为10 000 m,航行速度为东向200 m/s,仿真时长为15 min,采样间隔为1 s,均为双频接收机。图7为GrafNav解算得到的飞行轨迹,用户接收机由西向东经过BEIJ站上空,地面投影的航迹长约140 km。

图7 运动轨迹
为了分析差分增强效果,在图8绘制了实曲线和虚曲线,分别表示差分前和差分后的水平定位误差。定位误差(均方根)从2.30 m降到0.11 m,定位精度大幅提高,与实测数据性能相当[9],可见该平台能够支持差分增强技术的仿真。用户可通过布设多个监测站,实现差分增强技术和精密定位技术的系统级分析研究。
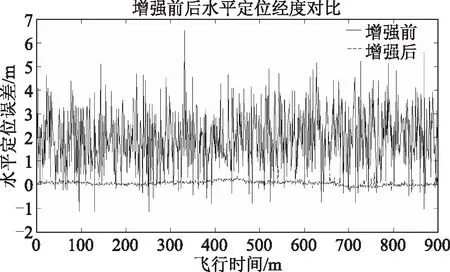
图8 水平差分增强效果
5 结束语
本文设计了以差分和完好性研究需求为导向的全球卫星导航系统综合仿真平台,具备参数灵活配置、数据标准化输出和平台可扩展的特点,特有完好性故障仿真功能。性能测试结果表明,该平台模拟接收机性能达到真实接收机的性能,可以同时支持WAAS、GDGPS、LAAS和CORS等差分增强技术与精密定位技术的用户级和系统级仿真研究。
[1] U.S. Department of Defense. Global Positioning System Standard Positioning Service Performance Standard[EB/OL]. [2013-09-07].http://www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf.
[2] ZIMMERMANN F, HAAK T, HILL C. Galileo System Simulation Facility[EB/OL]. [2013-09-07].http://www.gssf.info/Documents/SESP%202004%20-%20Galileo%20System%20Simulation%20Facility%20-%20Issue%201%20-%20Revision%201.pdf .
[3] GURTNER W. RINEX:The Receiver Independent Exchange Format Version 2.10[EB/OL].[2013-09-07].http://igscb.jpl.nasa.gov/igscb/data/format/rinex210.txt.
[4] HILLA S. The Extended Standard Product 3 Orbit Format (SP3-c)[EB/OL].[2013-09-07].http://igscb.jpl.nasa.gov/igscb/data/format/sp3c.txt.
[5] KLOBUCHAR J A. Ionospheric Time-delay Algorithm for Single-frequency GPS Users [EB/OL]. [2013-09-07].http://www.dtic.mil/dtic/tr/fulltext/u2/a229968.pdf.
[6] RTCA. DO-229D, Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment [S].
[7] SHIN M Y, PARK C, LEE S J. Atomic Clock Error Modeling for GNSS Software Platform[C]//Proceedings of Position, Location and Navigation Symposium, 2008 IEEE/ION. Monterey, CA:[s.n.],2008:71-76.
[8] LUO Ming, PULLEN S, DENNIS J, et al. LAAS Ionosphere Spatial Gradient Threat Model and Impact of LGF and Airborne Monitoring[EB/OL]. [2013-09-07].http://gps.stanford.edu/papers/LuoIONGPS03.pdf.
[9] 黑志坚, 周秋生, 曲建光, 等. GPS RTK 测量成果的精度估计及应用探讨[J]. 哈尔滨工业大学学报, 2006, 38(8):1295-1298.