载波相位差分相对定位的模糊度求解
2014-01-16任小伟
任小伟
(中国电子科技集团公司 第二十研究所,西安 710068)
1 引言
近年来,随着科学技术的进步和应用需求的扩大,国内兴起了全球卫星导航系统(global navigation satellite system, GNSS)应用和开发的热潮,不仅测绘行业,其他相关行业如运输、航天、气象、探测、地矿开采等行业也正开展卫星导航的应用和开发[1]。由于GNSS信号自身的特性和应用的需要,促使差分相对定位技术面世,按照观测量的类型可分为位置差分、伪距差分和载波相位差分[2],由于载波相位的测量精度最高,因而实时动态的高精度相对定位都采用载波相位差分相对定位,定位精度能够达到厘米级。
2 载波相位差分定位原理
载波相位差分定位模型由两台接收机构成,其中一台作为基准站,另一台作为移动站,基准站将原始观测数据实时传送到移动站,并可构建载波相位双差观测方程。通过载波相位双差可削弱甚至消除轨道误差、钟差、大气误差等误差影响,进行实时数据处理,从而实时确定流动站位置和速度[2-3]。
在载波相位差分定位中,如图1所示,接收机j观测卫星P的载波相位的观测方程为

(1)

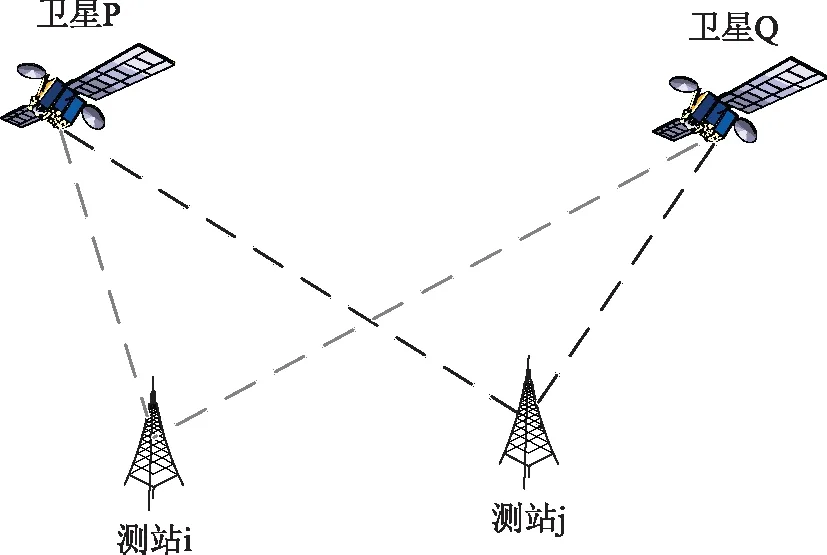
图1 双差相对定位示意图
假定接收机j到卫星P的几何距离为
(2)
当接收机j的初始坐标为(Xj0,Yj0,Zj0),其坐标的改正数为(δXj,δYj,δZj)。
初始坐标到卫星P的距离为
(3)
因而接收机j到卫星P的矢量的方向余弦为

载波相位观测方程在(Xj0,Yj0,Zj0)线性化表示为

(4)
在载波相位相对定位中,假定基准参考站的坐标为已知(Xi0,Yi0,Zi0),移动站的坐标为(Xj,Yj,Zj),并取移动站的初始坐标为参考站的坐标(Xi0,Yi0,Zi0),移动站坐标的改正数向量为(δXj,δYj,δZj)。因而,在相同载波频率的情况下,将参考站和移动站的观测方程分别表示为
(5)

(6)
在基线较短的情况下,两个观测站i、j具有近似相等的电离层和对流层改正参数,将观测方程进行单差可得

(7)
式中
将两个接收机分别相对于两颗卫星的单差方程次做差,可得到相对于两颗卫星的双差观测方程

(8)
式中
3 整周模糊度解算
文献[4]提出了LAMBDA方法,利用序惯条件下浮点模糊度及其协方差矩阵构造搜索空间,以模糊度残差平方和最小准则确定整周模糊度[6-7]。但不能保证能够得到正确解,为了获得正确的模糊度,需对双差模糊度浮点解进行整数变换降相关,以降低模糊度分量之间的相关性,然后再利用变换后的序惯条件下浮点模糊度及其协方差矩阵构造搜索空间,以模糊度残差平方和最小为准则确定整周模糊度,该方法因具有较高的搜索效率因而受到广泛关注[5-8]。其求解过程如图2所示。
1)模糊度浮点解采用最小二乘法。

图2 模糊度解算框图
将式(8)改写为如下形式
William Bernard Jones用四句话(四个“视角”,六个话题和一个从属话题)阐述了本场辩论的总话题(“干预叙利亚”)拟解决的问题,也就是叙利亚贫民所面临的大屠杀问题。

(9)
令G=[AB],则最小二乘法的浮点解和协方差矩阵分别为
式中
(假定卫星Q为基准星),A=λiIK

2)第二步就是在求出的浮点解的基础上,进行整数变换后,利用序惯条件下的模糊度构建目标函数
(10)
并使目标函数的值达到最小而解算出模糊度的整数解。

4 试验分析
本文采用了一组静态短基线数据,基线长度为5.46 m,观测历元数为35个历元。在短基线载波相位差分相对定位中,接收机钟差、卫星钟差、电离层误差和对流层误差几乎全部消除,能够得到很高的定位精度。
图3表示了GPS 13号卫星的整周模糊度的浮点解和整数解的关系。刚开始解算时,浮点解与整数解的差别比较大,随着观测历元数目的增加,整数解越稳定,大约在25个历元后模糊度固定。其他卫星的模糊度浮点解和整数解的关系与如图3所示卫星模糊度浮点解与整数解的关系类似。
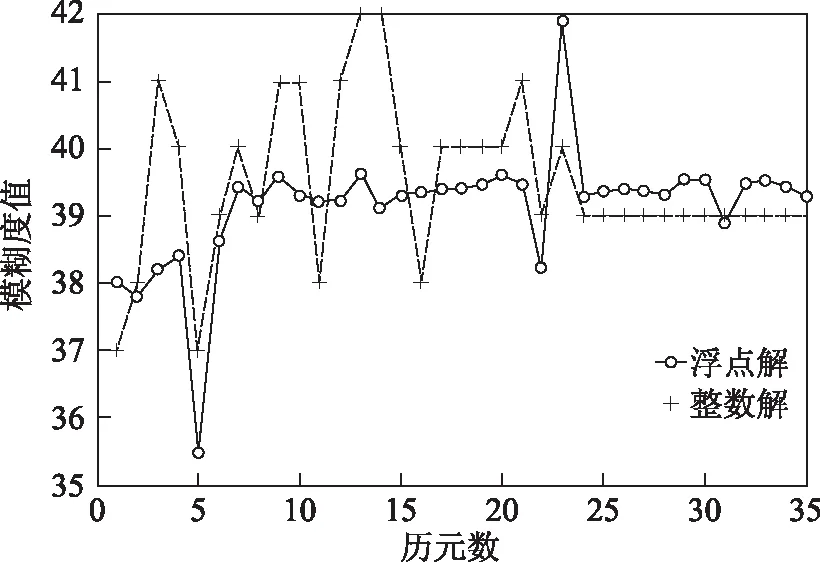
图3 13号卫星的模糊度的浮点解与整数解比较
图4表示了基线向量的浮点解与固定解。从图4中可以看出,定位开始时,浮点解与固定解间的差别比较大,经过十多个历元后,浮点解固定,达到5.45 cm,接近固定解。比较实测值和定位结果发现,其定位精度达到厘米级。

图4 基线向量的浮点解与固定解
5 结束语
载波相位差分相对定位的难点在于整周模糊度的解算,本文采用LAMBDA方法对静态短基线进行整周模糊度的解算,定位精度达到厘米级。采用LAMBDA方法降低了变量间的相关性,加快了搜索速度,仅需要较少的观测历元就能够解算出整周模糊度,本方法非常适合精密静态定位和动态定位。
[1] 刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003.
[2] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[3] 周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北京:测绘出版社,1992.
[4] TEUNISSEN P J G.The Invertible GPS Ambiguity Transformations[J].Manuscripta Geodaetica,1995,20(6):489-497.
[5] TEUNISSEN P J G, DE JONGE P J, TIBERIUS C C J M.The Least-squares Ambiguity Decorrelation Adjustment: Its Performance on Short GPS Baselines and Short Observation Spans[J].Journal of Geodesy,1997, 71(10):589-602.
[6] 赵蓓,王飞雪,孙广福,等.LAMBDA整周模糊度解算方法中的整数Z变化算法[J].弹箭与制导学报,2008,28(3):254-257.
[7] 卢献健.GPS整周模糊度求解理论分析与方法研究[D].桂林:桂林工学院,2008.
[8] 王子茹,李凤斌.综述GPS定位中整周糊度求解问题[J].东北测绘, 2000, 23(1):14-16.