应用GAMIT软件处理卫星定位数据大气水汽方法的研究
2014-01-16张云涛程伯辉白征东高星伟
张云涛,程伯辉,白征东,高星伟
(1.北京北斗星通导航技术股份有限公司,北京 100094;2.中国测绘科学研究院,北京 100039;3.清华大学 地球空间信息研究所,北京 100084)
1 引言
随着国民经济的不断发展,天气和气候的状况与人们的日常生活以及各行各业的联系越来越密切,而由于极端天气气候所造成的城市道路积水、交通拥堵、农田内涝、山体滑坡和泥石流等对工业农业生产造成巨大影响并给人们的生活带来不便;同样由于缺乏有效降水的旱灾天气和气候状况也会造成农田干旱减产、山林火灾以及人畜饮水困难。为了保障重大活动的正常进行以及有效缓解旱情等,不但要能够监测天气的变化情况,而且还要为人工影响天气工作所做的决策提供必要的信息等。
为了更好的趋利避害,使天气服务于人们的生产和生活,对大气进行相关的探测并提供及时、准确的天气预报是十分必要的。为此本文依托广东省GPS气象监测网建设项目,对地基GPS大气水汽探测的原理、方法展开研究,并对广东省GPS气象监测网进行数据处理及精度分析。
2 地基GPS探测水汽的误差分析
利用GPS探测大气水汽是通过间接的方法获得大气可降水含量的,因此其间必然直接或间接的带入许多的误差[1-8]。总的来说,利用地基GPS进行大气水汽探测主要误差有:
1)天顶总延迟的解算误差。天顶总延迟是通过GPS观测数据解算得到的,由于在GPS观测等过程中会受到的很多干扰因素,所以造成天顶总延迟的误差因素很多。如在GPS观测过程中受到的多路径效应干扰,有些情况下多路径效应引起的误差相当于0.3 kg/m2的大气综合可降水汽含(integrated water vapor,IWV)的误差;在GPS数据处理过程中卫星轨道误差的影响,由卫星轨道误差引起的IWV误差可达0.1 kg/m2[9]。在计算天顶延迟时,需要用投影函数将延迟量投影到天顶方向,所使用的投影函数模型存在误差,在推算湿延迟时所采用的大气参数存在误差,还有采样时间间隔的选择也会对结果造成误差影响等。
2)天顶干延迟的计算误差。通常计算天顶干延迟使用Hopfileld、Saastamoinen和Black三种模型。研究表明,采用以上三种模型进行天顶干延迟计算,其误差与观测站的地面气压的测定精度密切相关,同时与所采用的经验气象参数等也有关[10]。以Hopfield模型为例,其模型误差情况分析如下。
在推算天顶干延迟(zenith hydrostatic delay,ZHD)过程中,观测值所引起的误差可由误差传播定理得出,如式(1)所示

(1)
式中,md为推算ZHD的误差,mp为地面气压测定误差,mT为地面温度测定误差。
由式(1)可以看出,md的大小与mp关系密切,若要保证天顶干延迟ZHD的精度就需要确保在进行地面气压测定时达到一定的精度要求。
3)通过天顶湿延迟(zenith wet delay,ZWD)转换成大气可降水量(precipitable water vapor,PWV)时的相关误差。由湿延迟转换为PWV时,需要相应的转换系数k
(2)
式中,ρv是水汽的密度,K2=22.1 K/hPa、标准差为±2.2 K/hPa、是大气物理参数之一,K3=3.739×105K2/hPa、标准差为±0.012×105K/hPa、是大气物理参数之一,Rw是取值为461.495的水汽的气体常数,ρ是取值为103kg/m3的液态水密度,Tm表示大气的加权平均温度。
当转换系数存在误差时,相应地会造成所得到的PWV存在误差。在转换系数精度较差情况下,由转换系数造成综合水汽含量IWV的误差可达0.4 kg/m2。而转换系数与计算大气加权平均温度所使用的模型参数有关。
在GPS大气水汽探测应用中,是利用对于精确定位应用中存在的GPS观测的信号延迟等“误差”来探测大气的水汽含量,但是为了提高反演大气水汽的精度,需要消除或削弱GPS观测时非水汽造成的其他“误差”。利用高质量的GPS设备也可降低或消除一部分误差对结果的影响。
3 地基GPS气象的数据处理方法
地基GPS气象学研究的主要目的就是获取大气的可降水量。通过地基GPS方法得到相应的大气可降水量的流程如图1所示。

图1 基于地基GPS反演大气可降水量处理流程
3.1 观测数据获取及准备
在进行GPS数据处理前,首先要获取GPS观测数据,并进行相应的质量检查。然后还需要对原始观测数据的质量进行检查,数据质量检查结果通常包括观测时间、观测值删除率、周跳、钟漂及平均多路径误差MP1、MP2等。其中MP1、MP2的计算方法为
MP1=P1-(1+2/(α-1))Φ1
+(2/(α-1))Φ2
(3)
MP2=P2-(2α/(α-1))Φ1
+(2α/(α-1)-1)Φ2
(4)

3.2 探空获取大气可降水含量测定算法
经过长期以来的研究及应用,采用探空获取的温度、气压数据得到相应的大气水汽含量已经非常成熟,在很多应用及研究中,通常将探空方法得到的PWV等结果作为真值来检验其他方法得
到的PWV是否准确、可靠。本文旨在讨论利用地基GPS方法获取广东地区的PWV的相关问题,故采用探空方法得到的PWV等结果作为真值进行相应的数据对比、分析研究。
由探空获取的大气温度和气压数据可依据其与水汽的关系计算得出PWV数据为
(5)
式中,ρ为液态水的密度,ρv表示高度为h处的水汽密度。
水汽密度ρv可由气态方程改写为
ρv=e/(RvT)
(6)
式中,Rv=461.495 J·K-1·kg-1为水汽的气体常数,e为水汽气压,T为大气绝对温度。
4 GPS水汽探测结果对比
利用GPS接收机通过各地基GPS气象监测站点对降雨量进行观测。图2~图5分别给出了2011-09-01-15,广东省的佛冈、广宁、龙门、新兴、台山和惠东各站点的PWV结果及各站点的降雨量对比。图中,横坐标表示时间,2011-09-01 T00:00:00开始累计;纵坐标表示水汽含量和降雨量。
图2 佛冈PWV序列及降雨量图

图3 广宁PWV序列及降雨量图
图4 龙门PWV序列及降雨量图

图5 新兴PWV序列及降雨量图
图6 台山PWV序列及降雨量图
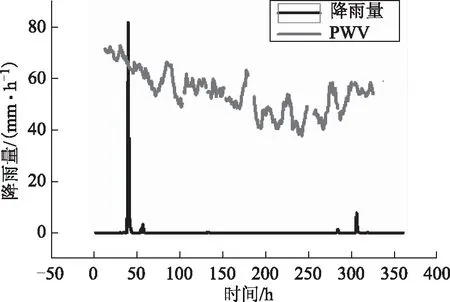
图7 惠东PWV序列及降雨量图
将惠东站的PWV数据与龙门站的数据进行对比分析,可以明显看到,惠东站获取的PWV在3~7 h不断增大,而在龙门站获取的PWV在6~10 h不断增大。由此可断定,水汽是由惠东站向龙门站运动,可通过惠东站与龙门站之间的距离除以水汽变化的时间差,得到水汽运动的速度为33.2 km/h,且运动方向为由南向北运动。由水汽运动的方向继而分析龙门站与其北侧的佛冈站的PWV变化,佛冈龙门站在13~15 h,PWV不断增长,而在其后的一段时间内,佛冈的PWV却在下降,这说明水汽并没有继续向北移动。从图上可看到,17 h后,新兴、广宁、台山站的PWV均有增长,这说明水汽经过龙门后,是向西运动的。
5 结束语
利用GPS气象监测网对水汽变化的监测,不但可以得到本地的水汽含量,通过对全网的数据进行对比和分析还可以获取水汽变化的趋势。若加大GPS气象监测网站的密度,其获取的水汽变化趋势将更加准确,这为准确的天气预报提供了可靠的依据。
本文的研究成果已经在广东省GPS气象监测网数据处理中得到了应用。但由于广东省GPS气象监测网刚刚建成不久,所获取的数据有限,而广东地区加权平均温度的本地化模型及水汽含量与降雨量的关系,都需要长期的数据作支撑,因此还有待于进一步的精化。相信通过广东省GPS气象监测网业务化运行,可以不断积累GPS大气探测信息的基础数据,为今后的水汽分布等分析研究提供更为完备的资料。
[1] 曹玉静.地基GPS技术遥感大气水汽含量及其在气象学中的应用[D].南昌:南昌大学,2008.
[2] 曲建光,吴壮.从GPS推算大气水汽的误差分析[J].测绘工程,2001,10(4):24-26.
[3] 陈俊勇.利用GPS反解大气水汽含量[J].测绘工程, 1998,7(2):6-8.
[4] 王勇,梁洪有,柳林涛,等.GPS气象的可靠性检核研究[J].测绘科学, 2006,31(5):123-124.
[5] 王志强,吴斌,周旭华.海潮对天顶延迟测定的影响[J].天文学报, 2003,44(3):318-322.
[6] 蔡昌盛, 李征航,张小红.利用GPS载波相位观测值建立区域电离层模型研究.测绘通报,2002(11):14-16.
[7] 蔡昌盛,李征航,赵晓峰.利用GPS组合观测值建立区域电离层模型研究[J].测绘工程, 2003,12(1):14-16.
[8] 张小红,李征航,蔡昌盛.用双频GPS观测值建立小区域电离层延迟模型研究[J].武汉大学学报:信息科学版,2001,26(2):141-143.
[10] 王富有,史先领.实时气象参数改正GPS定位中的对流层延迟[J].能源技术与管理,2006(6):132-134.
[11] KING R W, BOCK Y.Documentation for the GAMIT GPS Analysis Software[EB/OL].(2002-01-15)[2013-07-18].http://www-gpsg.mit.edu/~simon/gtgk/GAMIT.pdf.
