无人机发动机停车应急着陆纵向控制律研究
2014-01-15黄一敏孙春贞
黄 开,黄一敏,孙春贞
(南京航空航天大学 飞行控制研究所,江苏 南京 210016)
无人机在空中发动机停车,失去动力来源,不能爬升或平飞,无法继续飞行任务,为确保飞行的稳定和安全回收,最佳的选择是下滑至可着陆区域内进行迫降。对于升阻比较大的无人机,其轨迹鲁棒性较好,可选择跟踪合适的下滑轨迹角,从发动机停车初始位置过渡飞行至可着陆区域附近。针对这一问题,K.Brinkman和 H.G.Visser[1]在研究中使用了最优控制的理论,设计了在起飞阶段执行应急着陆的控制策略。Pillar Eng和Luis Mejias[2]等人在研究中使用了现代控制理论中的模糊控制理论,根据Dubins曲线理论设计了应急着陆轨迹的生成算法,并模拟有人机飞行员的思维方式设计应急着陆返场航路选择判据,设计了应用与应急返场的导航制导策略,并通过数字仿真验证了这一方法的合理性。Avishai Adler和Aharon Bar-Gill[3]等人针对应急返场飞行,简化返场飞行航路,设计了基于Dubins曲线的最优飞行轨迹三维轨迹生成算法,并通过数字仿真验证了这种方法合理性及有效性。Ilana Shapira和Joseph Ben-Asher[4]为寻求发动机停车后飞机的最大飞行范围,使用最优控制理论,设计了导航制导策略。
但进入可着陆区域后,若沿用发动机正常情况下的着陆控制策略,跟踪预定的高度剖面,则造成速度开环,会导致空速发生很大的变化,影响着陆飞行安全。因此,在应急着陆过程中,需要一种更为合适的控制策略。
本文以此为背景,研究在可着陆区域内着陆的纵向控制问题,选取某型轮式起降无人机,设计纵向控制策略。
1 发动机正常情况下的着陆
如图1所示,通常无人机的着陆都可以划分为陡下滑飞行、末端拉起以及浅下滑飞行3个典型阶段。着陆段追求的主要目标是:调整飞行高度的误差,实现无人机安全着陆。
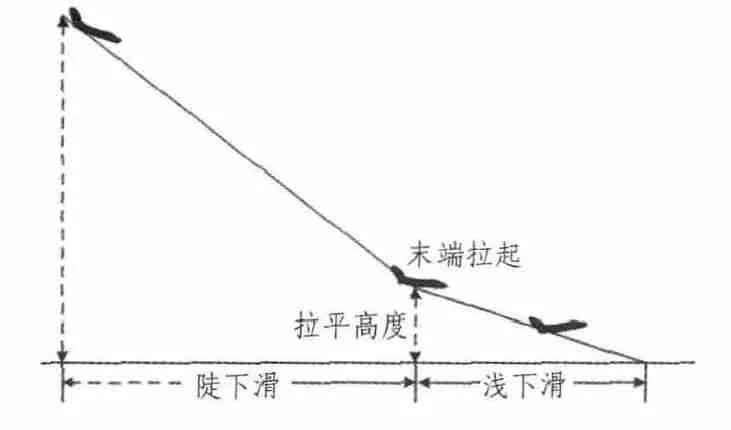
图1 着陆飞行过程示意图Fig.1 Longitudinal flight path of normal landing
对象无人机采用常规气动布局,后置式螺旋桨发动机。发动机正常的情况下,陡下滑段纵向通道使用升降舵实现高度指令跟踪,发动机控制飞行速度,这样便避免了纵向通道内高度控制和速度控制之间的耦合。式(1)和式(2)分别为无人机高度回路和速度回路的控制结构:
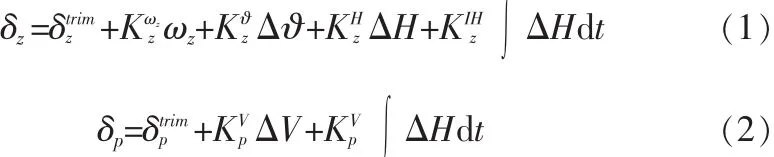
在浅下滑段,为改善无人机浅下滑段的飞行品质,末端拉起时,接入高度变化率反馈,用以改善无人机的拉平效果。此外,浅下滑段的时间较短,无人机无法及时响应高度控制,高度积分作用较小,俯仰角的前馈补偿起主要控制作用,因此在该阶段,断开高度积分环节,只将陡下滑段积分值做为舵面配平量加到升降舵上。纵向通道采用的控制结构如式(3)所示。

2 发动机停车的应急着陆
发动机停车时,无人机失去动力来源,对纵向通道造成了很大的影响,相比于发动机正常情况下的着陆存在以下不同:
1)无发动机推力,无人机飞行速度变化明显;
2)陡下滑段的飞行轨迹比常规情况下的下滑轨迹陡;
3)纵向通道内只有升降舵一个控制输入。
若沿用正常情况下的纵向控制策略,使用升降舵控制高度、跟踪下滑轨迹;无发动机输入势必导致空速回路开环,引起速度的变化,给飞行安全带来影响。表1给出了使用原控制策略,跟踪原下滑轨迹(轨迹倾斜角为-2.5°),触地时刻纵向通道的主要物理量。

表1 触地时刻纵向通道物理量Tab.1 Longitudinal states when touching down on runway
由于速度回路开环,因此在陡下滑段无人机不能有效的控制其飞行速度。无人机无动力飞行最浅下滑的轨迹角度为-3.5°,较有动力情况下都下滑轨迹角陡,因此在进行高度跟踪时,由于高度指令的原因,无人机会过分的拉起飞行姿态,使迎角增大,同时也使飞行速度减小得更快,甚至会导致陡下滑段内飞机已经失速,无法安全完成最终的着陆飞行。
如果单纯地将速度信号反馈到升降舵通道,着陆时只控制速度,则造成高度开环,不能跟踪给定的下滑轨迹,无法实现调整高度误差的目的。所以将高度或速度信号直接反馈至升降舵,调整姿态角,无法兼顾两者的控制需求。
在浅下滑段,断开控制速度,只跟踪给定下滑轨迹,并进行姿态角的开环补偿;因此升降舵起主要控制作用,无论发动机停车与否,对该阶段的控制结构影响不大。所以在无动力应急着陆过程中面临的关键问题是:如何在陡下滑段通过升降舵同时实现轨迹的跟踪和飞行速度的保持。
3 陡下滑段变轨迹角控制
根据应急着陆的飞行特点以及上述分析,在发动机停车情况下的应急着陆的问题主要存在于陡下滑段。针对纵向通道的主要问题,提出在陡下滑段使用“变轨迹角控制”的方法。
由于升降舵对速度和高度的控制之间存在耦合,所以在使用升降舵进行高度跟踪时,就不能将速度信号直接反馈到姿态回路上。但为确保陡下滑飞行的安全,必须加入速度的控制。在原有的高度回路基础上,增加空速控制,通过调整航迹倾斜角,间接地改变飞行姿态,进而实现对空速的控制[5]。陡下滑段变轨迹角控制结构如式4所示。
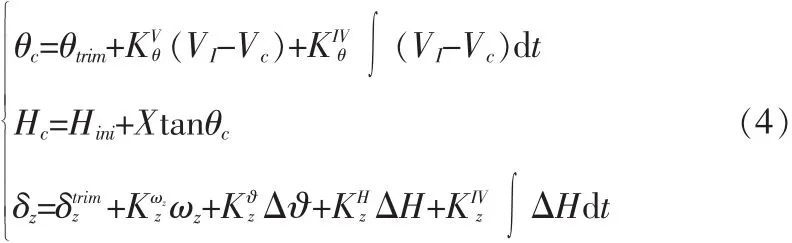
从控制律形式上看,速度回路采用表速的比例积分控制,空速控制产生的是航迹倾斜角反馈量与配平量θtrim共同构成航迹倾斜角指令θc,求解高度指令时,使用θc。为确保着陆点的位置范围,将空速产生的航迹倾斜角反馈量做限幅。
采用变轨迹角的控制方法,通过航迹倾斜角建立起两者的联系,实际上是利用了速度与高度之间的耦合:两者均为长周期变量,因此整个过程内迎角近似不变,在发动机推力不变的情况下,若速度较小,造成升力较小,因此速度法向上的合力会使无人机下降得更快,轨迹角变陡;反之,若速度较大,导致升力较大,速度法向上的合力会使无人机下降速度变慢,轨迹角变缓[6]。
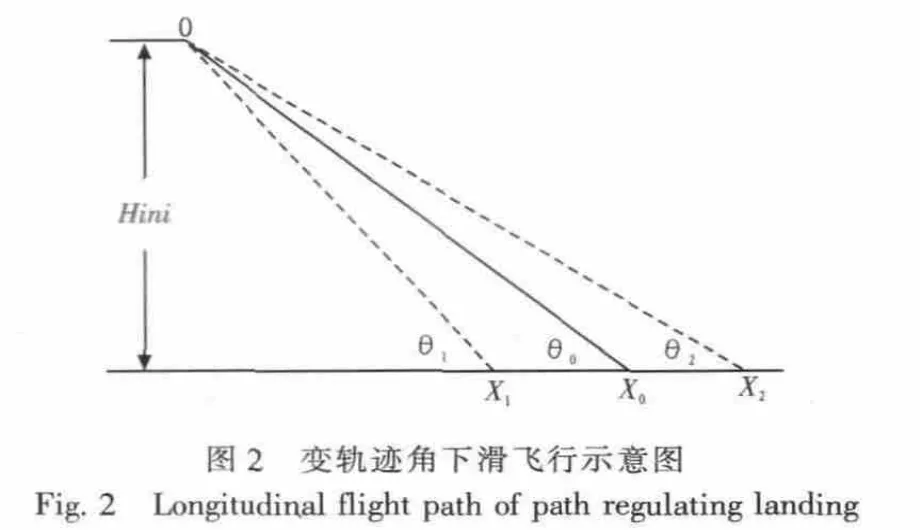
从能量的角度看,该控制策略相当于对飞行时的总能量的协调与分配。图2给出了无人机使用变轨迹角控制的飞行轨迹示意图。无人机按照给定的速度进行陡下滑时,其飞行轨迹角为θ0,飞行轨迹为OX0;若飞行速度小于给定的空速指令,说明动能不足,为确保飞行安全以及对轨迹跟踪的效果,需要增大动能,提高飞行速度,增加的动能由无人机的重力势能转换而来,改变轨迹角,使飞行轨迹变陡,这种情况下无人机的飞行轨迹角为θ1<θ0,通过跟踪OX1轨迹实现能量的转换;若飞行速度大于给定的空速指令,说明动能过剩,若依旧按照θ0轨迹角飞行,则无人机的升降速度绝对值会过大,可能会给下滑飞行带来危险,因此需要使飞机按照轨迹角θ2>θ0,通过跟踪OX2轨迹,将过剩的动能转化为高度势能使飞行速度保持在给定的指令值。
相比于正常情况下控制策略,在应急着陆中使用变轨迹角的控制具有以下优点:
1)利用了升降舵在高度和速度控制中的耦合;
2)在跟踪飞行轨迹的同时,能有效的控制飞行速度;
3)不改变原有控制结构,在高度回路外增加速度控制,在实际应用中更容易实现。
然而由于进入陡下滑段的初始状态存在不确定性,可能会造成无人机实际着陆点与目标着陆点之间的偏差,在实际应用中可以根据需要调整飞行轨迹。
4 仿真验证
选取对象无人机总质量为1 100 kg,机场高度为海拔1 000 m,进入陡下滑段的初始高度约为海拔1 500~1 600 m,陡下滑表速指令为36 m/s。表2给出了使用变轨迹角控制策略着陆时考虑的不确定因素及其变化范围。图3为采用变轨迹角控制,以不同初始速度进入都下滑段的着陆仿真曲线;表3给出了考虑了阻力系数和俯仰力矩系数不确定性的应急着陆,纵向通道主要状态量的变化范围。
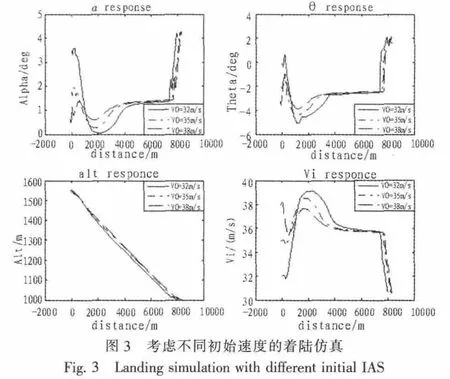
分析图3,在整个着陆段无人机采用了变轨迹角控制策略,在不考虑阻力系数、俯仰力矩系数不确定性情况下,尽管初始速度不同,无人机都可以很好的跟踪飞行轨迹,使飞行速度得到有效的控制,能在末端拉起前将速度控制在给定的表速指令附近,使无人机进入浅下滑段时的状态确定,并能保证触地时迎角、姿态角以及飞行速度均在安全的范围内。证明了变轨迹角控制策略对不同的飞行速度具有很好的鲁棒性。分析表3,处地点范围为无人机着陆点与目标着陆点之间的距离,其中正值表示超过目标着陆点,负值表示未达到目标着陆点。无人机以35 m/s的速度进入着陆段,纵向通道引入了阻力系数的不确定性和俯仰力矩系数的不确定性,使陡下滑阶段的飞行轨迹变化较大,影响了触地点的范围,这是在应急着陆飞行时无法避免的,因此在实际飞行中,需要选取较为空旷的场地作为应急着陆降落区域,下滑飞行时可根据不同的飞机适当调整轨迹倾斜角。此外,尽管纵向通道引入了不确定性因素,采用了变轨迹角的控制策略,无人机的飞行速度、迎角以及俯仰角都能够被控制在一个确定的范围内。根据上述分析,应急着陆时采用变轨迹角的控制策略,使无人机在下滑飞行时可以很好地跟踪飞行轨迹和速度指令,而且对速度、迎角和俯仰角的控制具有一定的鲁棒性,保证了最终着陆时刻的安全触地。
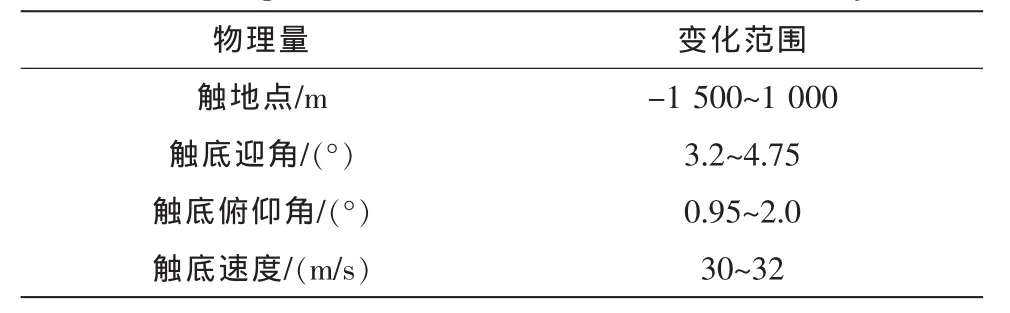
表3 考虑不确定性影响的着陆数据Tab.3 Touching down states of simulation with uncertainty factors
5 结 论
文中分析了无人机应急着陆过程中遇到的控制问题,并针对这一问题给出了一种改进的控制方案,利用纵向通道内速度和高度之间的耦合,在陡下滑过程中使用变轨迹角的控制策略,实现了无发动机控制输入情况下,使用升降舵同时实现跟踪高度和保持速度的控制效果。仿真结果表明,该控制策略能够使无人机在着陆段跟踪给定轨迹,并有效的控制飞行速度,确保了着陆段飞行以及触地时刻的安全,证明了无人机应急着陆使用变轨迹角控制的合理性。
[1]Brinkman K,Visser H G.A closed-loop guidance approximation for the turn-back maneuver after engine failure during climbout, AIAA-2007-233[R].Reno, Nevada:AIAA 45th Aerospace Sciences Meeting and Exhibit,2007:8-11.
[2]ENG P,MEJIAS L.Automating human thought processes for a UAV forced landing[J].Journal of Intelligent and Robotic Systems,2010(57):329-349.
[3]Jett B W.The Feasibility for Turnback from a Low Altitude Engine Failure During The Takeoff Climb-out Phase,AIAA-82-0406 [R].Orlando,Florida:AIAA 20th Aerospace Sciences Meeting,1982:11-14.
[4]Shapira I,Ben-Asher J.Range maximization for emergency landing after engine cutoff[J].Journal of Aircraft.September-October,2005,42(5):1296-1306.
[5]李欣.小型无人机简化配置控制律设计技术研究[D].南京:南京航空航天大学,2011.
[6]张明廉.飞行控制系统[M].北京:国防出版社,1983.