翼伞转弯机理及其影响因素仿真分析
2014-01-15李德荣吴泽锐于群涛
李德荣,陈 楸,吴泽锐,于群涛
(西北工业大学 自动化学院,陕西 西安 710129)
与传统降落伞相比,翼伞具有良好的滑翔性能、稳定性和可操纵性等特点[1],这使得翼伞空投系统可从远距离高空投放点精确地将物资装备投送到预定地点,达到定点、无损的要求。鉴于翼伞在空投作业上的突出优势,翼伞空投系统被广泛应用到部队兵力装备的投送、飞行器的回收和人道主义救援等方面。
为了提高翼伞系统的航向安定性,翼伞系统可在伞衣后缘中部连接尾伞,或在伞衣两侧边缘设计安定面[2],德国ALEX系统在伞舱尾部也加装了类似飞机垂尾的安定面。除设计方法外,翼伞自身的拱形结构是保持系统航向安定性的关键因素。但翼伞航向安定性是有一定范围的,否则会对翼伞的转弯特性造成不利影响。本文系统分析了翼伞转弯的机理,建立了翼伞系统六自由度动力学模型,通过数值仿真,详细分析了翼伞航向安定性和阻力方向舵对翼伞转弯特性的影响。结果表明只有两者相互匹配时,才能够提供良好的转弯性能。
1 翼伞动力学模型的特点
1.1 翼伞建模的特点
为了便于研究,本文建立了翼伞系统六自由度仿真模型,其动力学方程可通过动量和动量矩定理获得。建模过程中要考虑到翼伞区别于飞机的结构特点,翼伞的重心较低且伞衣轻质柔软易变形,同时必须将翼伞在空气中所受到的附加质量影响考虑进来,本文采用的是Lissaman[3]提供的附加质量矩阵形式。翼伞动力学方程的具体推导过程在文中不再赘述,可参见文献[4-5]。
像其它飞行器建模一样,可以将翼伞看作刚体。但由于翼伞的结构特点,翼伞作为刚体的适用范围是有限的。如图 1所示,翼伞的伞绳汇集到吊挂物上,伞绳呈三角形分布。由于伞绳只能传递拉力,不能传递压力,所以经过伞绳所能传递的力的方向只能限定在这个三角形的范围内。
图 1中吊挂物处于位置a时,受力不可能平衡,翼伞系统向右下方平行移动。此时,伞衣上受到的空气阻力远大于吊挂物上所受到的空气阻力,形成使翼伞系统逆时针转动的力矩。翼伞系统的合成运动基本上是以伞衣为中心的摆动,吊挂物将摆动到b点,而伞衣的运动相对于吊挂物的运动要小得多。此外,一般翼伞系统的伞绳都很长,以降低摆动的频率。因此,在翼伞建模时,将机体系的坐标原点放在伞衣上某处比放在系统的质心更方便。气动力的力矩都是按气动焦点计算的,为了避免重新计算气动力的力矩,可以将坐标原点放在气动焦点处。
将机体系的坐标原点放在质心以外的位置,系统的转动惯量需要按平移定律进行修正。重力对坐标原点的力矩很自然地表现出对系统姿态的稳定作用。
1.2 翼伞的纵向运动特性
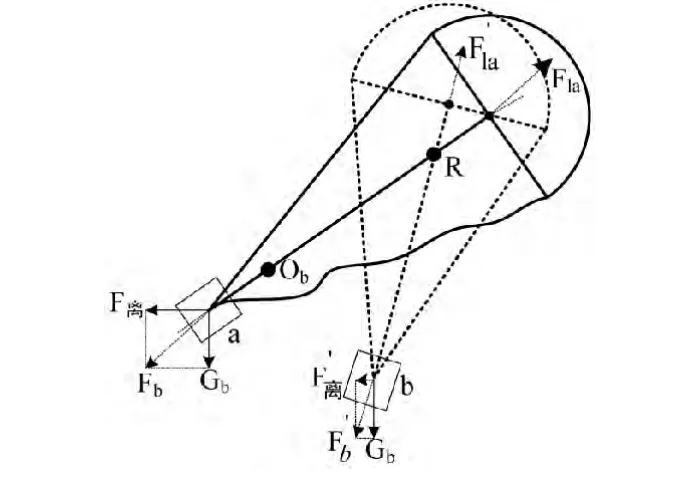
图1 翼伞的建模特点Fig.1 Modeling features of parafoil
对于飞机可以按机身的轴线和翼尖的连线来定义机体坐标系,而翼伞系统的机体坐标就不这么明显了。我们可以想象,如果没有阻力,翼伞系统在稳定平飞时,气动力和重力将在一条铅垂线上。我们可以用这条铅垂线来定义翼伞系统的机体坐标系。由于气动力的压力中心随着迎角和侧滑角而改变,为方便起见,我们选择气动焦点作为机体系的坐标原点。以气动焦点到系统质心的连线作为机体系的z轴。在纵向对称面内,以z轴的垂直线为x轴,方向指向翼伞的前缘。按右手定则确定y轴。
翼伞的安装角定义为翼面弦线与x轴的夹角。同滑翔机一样,翼伞的安装角应该是负的,即翼的前缘低于后缘。如此,气动力的合力Fp前倾,其水平分量F成为系统前飞的“牵引力”。当翼伞从静止状态开始下落时,自然稳定的状态使机体系的Oxy平面基本上在水平面内,速度方向垂直向下。由于翼面弦线前倾,其上的气动力也是前倾的,气动力的水平分量使翼伞系统获得前飞的加速度。当前飞速度足够大时,升力与重力平衡,达到稳态。这时,翼伞系统有确定的滑翔速度和滑翔比。对于同样的翼伞,不同的翼载比及(或)不同的安装角,将有不同的滑翔速度和滑翔比。
图2中翼伞系统处于稳定滑翔状态。翼伞气动升力Lp和阻力Dp按翼坐标系分解,阻力沿弦向,升力与弦向垂直。载荷重力Gb垂直向下,阻力Db水平向后。稳定滑翔时,系统沿伞衣焦点与载荷质心的连线pb受力平衡:

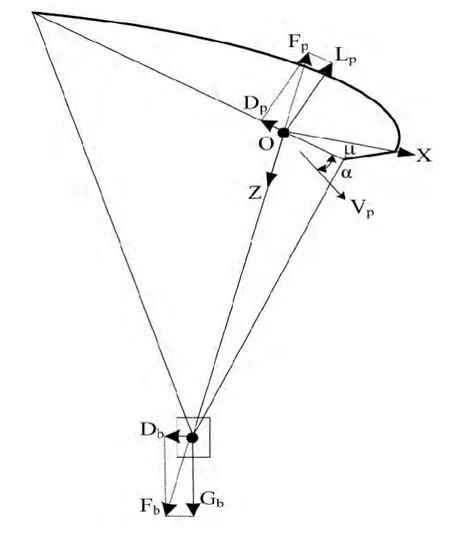
图2 翼伞的纵向运动特性Fig.2 Longitudinal motion characteristics of parafoil
1.3 翼伞的横向运动特性
翼伞后缘的左右两侧可以分别由两根操纵绳下拉以实现对翼伞飞行轨迹的控制。当左侧后缘下拉时,左侧阻力增大,产生负的偏航力矩,使翼伞前缘向左转动,出现正的侧滑角。翼伞系统应有适当的航向安定性,出现侧滑时会产生一个减小侧滑趋势的回复力矩。对于一定的操纵量,在操纵力矩和回复力矩的共同作用下,翼伞系统将稳定在一个确定的侧滑角上。如图 3所示,此时气动力的水平分量F可以分解为切向力Ft和法向力Fn,其中法向力提供了转弯所需的向心力。
翼伞后缘左侧下拉时,其升力也会增加,产生一个正的滚转力矩,使翼面略向外倾,这是不利于转弯的。但由于翼伞系统的重心很低,正常情况下,这种作用很弱。
综上所述,翼伞系统以侧滑转弯为主。为了达到适当的侧滑角,翼伞的操纵力矩和航向安定性回复力矩的匹配是一个关键因素。本文对此进行了仿真分析。

图3 翼伞的横向运动特性Fig.3 Lateral motion characteristics of parafoil
2 翼伞的舵效和航向安定性
在影响翼伞转弯性能的诸多因素中,翼伞的舵效和航向安定性是影响其转弯性能的重要因素。两者对转弯性能的影响主要体现在偏航力矩上。偏航力矩系数表达式如下:

从式(2)可以看出,翼伞系统的偏航力矩主要由操纵偏航力矩和偏航回复力矩组成,气动系数分别为 Cnδr(δr)和 Cnβ(β),代表了阻力方向舵的舵效和翼伞的航向安定性。当上述两种偏航力矩匹配时,系统才会产生合适的侧滑角,形成稳定的转弯。
图4是翼伞阻力方向舵的操纵特性,整体呈非线性关系。当翼伞单侧下拉量很小趋近于0时具有死区特性,此时翼伞没有转弯的趋势;当翼伞单侧下拉量很大趋近于1.0时具有饱和特性,在趋于饱和范围内的翼伞舵效对转弯状态的影响差别不大。阻力方向舵的舵效对阻力系数的影响比较大,当翼伞后缘单侧下拉时,翼伞两侧产生的阻力大小不同,下拉一侧的阻力要大于另一侧,因此产生了朝向下拉一侧的偏航力矩。右侧下偏时产生正的偏航力矩,翼伞往右转弯;左侧下偏时产生负的偏航力矩,翼伞往左转弯。
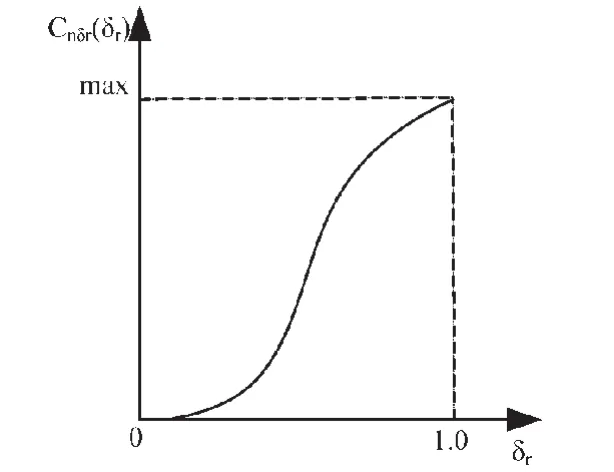
图4 阻力方向舵操纵特性Fig.4 The handling characteristic of drag rudder
图 5是翼伞的航向安定性特性,3条曲线分别代表了航向安定性不同的3种翼伞,整体呈非线性关系。对于同一种翼伞,侧滑角越大,翼伞的偏航回复力矩越大,但侧滑角是有限度的,当翼伞的侧滑角超过25°时,翼伞的航向安定性效果急剧变差,转弯状态变得不稳定。
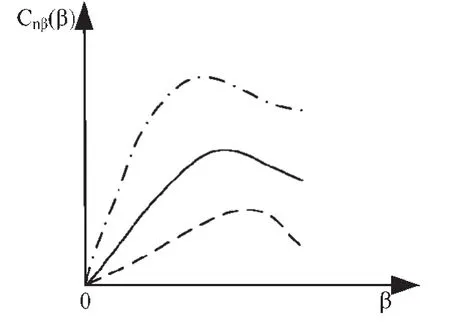
图5 航向安定性特性Fig.5 The characteristic of directional stability
航向安定性特性曲线的斜率为航向静稳定性导数,表达式如下:

它是衡量翼伞航向安定性的重要参数。翼伞在飞行过程中受风扰动或转弯操纵时会产生侧滑角β,同时翼伞航向也会发生变化,此时翼伞会通过Cnβ产生偏航回复力矩阻止侧滑角β增加,翼伞系统重新进入平衡状态,这种作用效果来自翼伞的展向拱形结构[6-7]。下面将仿真分析航向安定性对翼伞转弯性能的影响。
3 仿真实验
翼伞系统进行远距离空投作业时,要根据位置、风向信息和任务规划不断消除侧向误差,进行航迹控制,以达到精确安全着陆的目的,此过程须进行转弯操纵控制。
下面将通过仿真实验研究翼伞航向安定性和操纵力矩对翼伞转弯性能的影响。表1为翼伞的基本结构参数。
仿真实验选取 Cnβ=10-5/deg、10-2/deg和 10-1/deg 3个值,分别代表航向安定性不足、合适和过强的3种不同翼伞;左侧下拉量δr选取0.2~1.0 9个操纵量。仿真开始时,翼伞系统从6 000 m高空稳定滑翔50 s后进行转弯操纵,稳定后的测试结果如图 6~图 8所示。
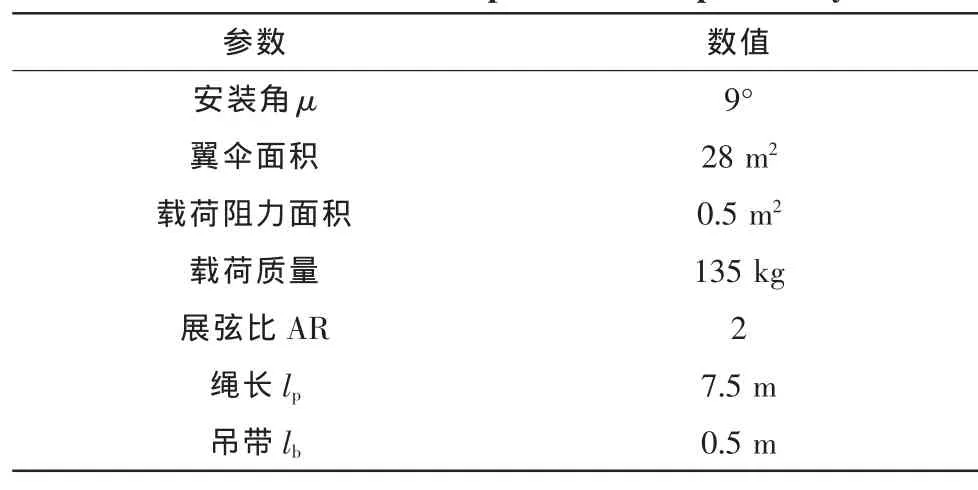
表1 翼伞系统基本结构参数Tab.1 The basis structure parameters of parafoil system

图6 翼伞侧滑角βFig.6 The side-slip angle β of parafoil

图7 翼伞转弯半径RFig.7 The turn radius R of parafoil

图8 安定性过强时的反转情况Fig.8 Reverse turn when excess of directional stability
图6 、图 7表明了翼伞航向安定性和单侧下拉量都会影响到翼伞的转弯状态。图6中安定性过强翼伞的侧滑角和图7中安定性不足翼伞的转弯半径只画出了可正常转弯时值。在以上两图中,对于航向安定性合适的翼伞,随着单侧下拉量的增加,翼伞侧滑角增加,转弯半径减少。
从图 6中明显看出,当翼伞安定性不足时,较小的操纵量就会使侧滑角变得极大。当δr=0.4时,侧滑角为1.5°,而δr超过0.4后,翼伞侧滑角变得极大,这种情况是由于翼伞的操纵力矩远大于偏航回复力矩所致。
从图 7中明显看出,当翼伞安定性过强时,翼伞即使在较大操纵量时转弯半径也很大。如图所示,当δr小于0.7时,转弯半径就已超过了1 000 m,此时翼伞变得难以转弯。单侧下拉量较小甚至出现了逆向转弯的情况,如图 8所示,δr≥0.5时,翼伞正常往左转弯,但当δr≤0.4时,翼伞往右转弯,这种情况是由于偏航力矩远大于操纵力矩所致,而随着下拉量逐渐增大,操纵力矩增加,翼伞恢复左向转弯。
根据对仿真结果的分析,我们可以得出:翼伞航向安定性不足或者过强都会影响到翼伞的转弯性能。只有翼伞的航向安定性和操纵力矩匹配时才会有良好的转弯性能,才能实现翼伞系统的精确空投。
4 结束语
影响翼伞转弯性能的因素有很多,文中在深入分析翼伞转弯机制的基础上,重点研究了翼伞的航向安定性和阻力方向舵对转弯性能的影响,所得结论可为翼伞系统转弯状态研究提供有益的理论参考。
[1]秦子增,葛玉君.可控翼伞飞行转弯控制性能仿真初步研究[J].宇航学报,1993(1):89-96.QIN Zi-zeng,GE Yu-jun.Preliminary simulation of flight turn performance of controllable parafoil systems[J].Journal of Astronautics,1993(1):89-96.
[2]Ward M,Costello M,Slegers N.Specialized System Identification for Parafoil and Payload Systems[J].Journal of Guidance, Control, and Dynamics,2012,35(2):48-50.
[3]Lissaman P B S,Brown G J.Apparent mass effects on parafoil dynamics[R].AIAA-93-1236:10-13.
[4]Toglia C,Vendittelli M.Modeling and motion analysis of autonomous paragliders[J].Department of Computer and System Sciences Antonio Ruberti Technical Reports,2010,2(5):32-35.
[5]焦亮,孙青林,亢晓峰.翼伞空投机器人系统的六自由度仿真[J].计算机仿真,2011,28(001):39-42.JIAO Liang,SUN Qing-lin,KANG Xiao-feng.Simulation of 6-DOF parafoil and air-dropped robot system[J].Computer Simulation,2011,28(001):39-42.
[6]Nicolaides J D.Parafoil wind tunnel tests[R].Notre Dame Univ in Dept of Aerospace and Mechanical Engineering,1971.
[7]Strickert G,Witte L.Analysis of the relative motion in a parafoil-load-system[R].AIAA,2001-2013.
