基于稀疏表示的船体检测方法研究
2014-01-15郭俊辉
李 磊,郭俊辉
(上海海事大学 信息工程学院,上海 201306)
近年来,为了提高航运的安全性,海事CCTV成功运用到了船舶监管系统中,与岸基VTS与AIS系统相互补充,为航道的安全发挥了重要的作用。但是遗憾的是,就目前CCTV系统完全依赖工作人员值守,需要手动控制云台,并且要求工作人员一直盯着显示系统,获取视频信息,通过人为的理解和判断才能做出相应的决策。这无疑增加了海事管理部门的人力资源的浪费,且工作效率不高。特别是在监控点较多、船舶密度较大的情况下,完全依赖人工操作是一项十分繁重的任务。因此对CCTV的自动或者半自动化的需求越来越迫切。为了解决这个问题,浙江大学的洪晶[1]提出了海事场景的网络视频监控,通过网络获取现场视频图像并监控用户自定义的区域,缺点是目标被遮挡后会出现跟踪丢失。李斌[2]提出利用粒子滤波构造运动船舶模型,以此实现对运动船舶的检测与跟踪,这种方法可以很好地描述运动船舶的检测与跟踪,但是在船舶静止或者航道背景变化的情况下检测跟踪效果不好。武汉理工大学的叶玲利[3]提出利用背景帧差法实现内河视频监控中运动船舶检测和遮挡分离,这可以解决背景不动的运动船舶检测的问题,但是对于背景不断变化且船舶目标行进缓慢的情况下达不到理想的检测跟踪效果。为了实现在复杂背景不断变化且船舶航行缓慢的甚至被遮挡情况下的检测与跟踪,提出了一种新的基于稀疏表示的船体检测与跟踪算法。该算法对视频序列逐帧检测且对航道背景是否变化无要求,可以解决文献[2-3]因航道背景变化或者船体目标行进缓慢而引起漏检的问题;该算法中稀疏表示对船体的检测具有很好的鲁棒性,可以解决文献[1]因船体目标被遮挡而引起的跟踪丢失问题。
1 稀疏表示船体检测
1.1 稀疏表示
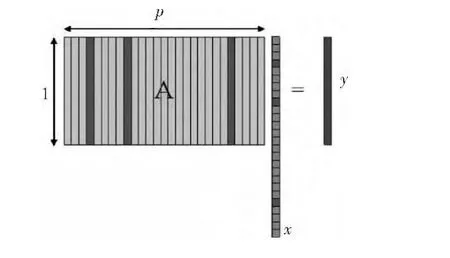
稀疏表示是由OLSHAUSEN等人[4]提出的能对复杂信号进行压缩表示并能高效重构的方法,近几年在模式识别及计算机视觉领域引起了广泛的关注,且在目标检测与跟踪中取得了很好的效果。下面对稀疏表示原理阐述如下。其中图1描述的是稀疏表示原理。设信号y∈Rl维待表示信号,A∈Rl×p的冗余字典,则信号y可表示如式(1)所示。

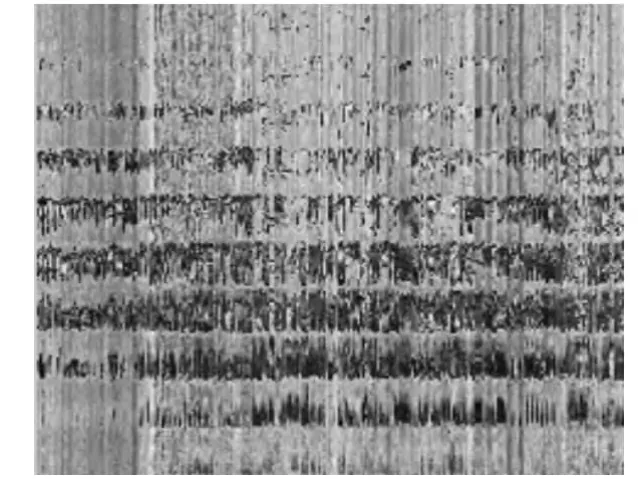
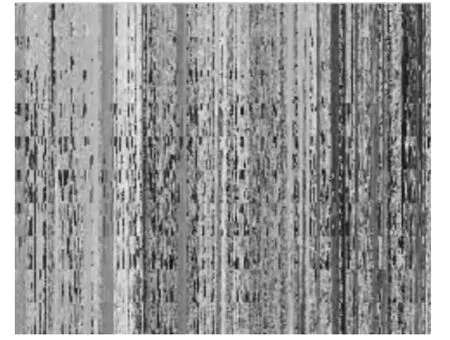
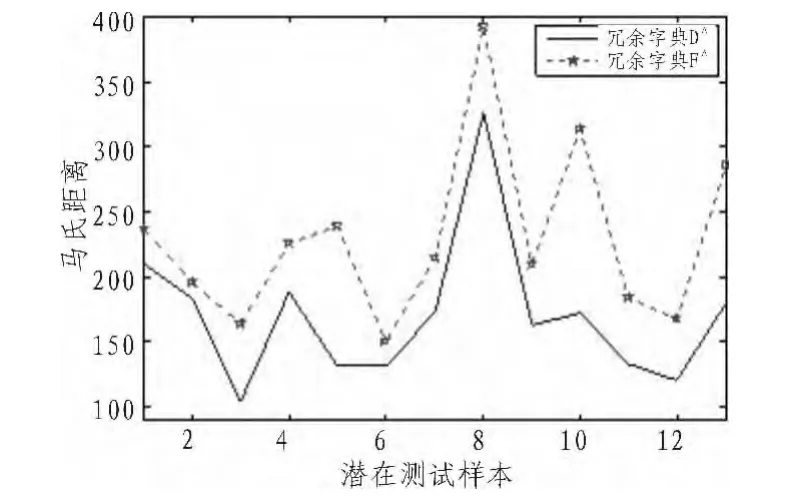
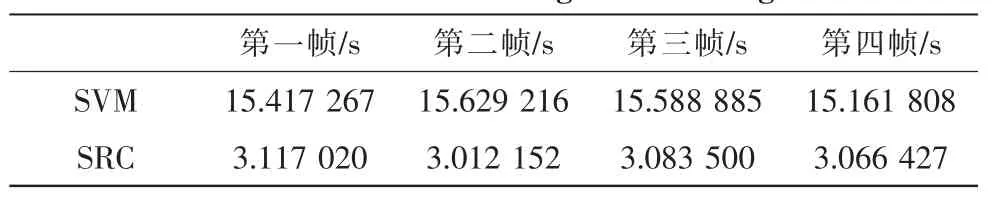
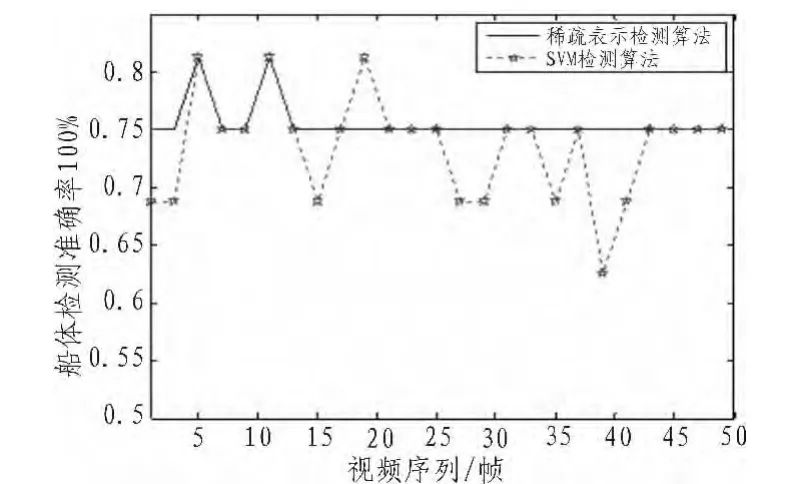
其中x∈Rp的系数向量,因为l< 其中,‖·‖0表示统计系数向量x非零元数的个数。 图1 稀疏表示原理(图片引自文献[5])Fig.1 Sparse representation theory(Images from the literature[5]) 由于在实际应用中允许一定的误差存在,所以可将上式最优化求解问题转化成求解不等式(3)的过程。 其中,ε为误差阈值,‖·‖2表示求取二范数。将式(3)转化为无约束形式,如式(4)所示。 其中,λ为调节参数,且λ≻0。理论上,λ越大,系数向量x越稀疏,且当 λ→0 时,ε→0。 在式(4)中,当 λ=0时,式(4)将变为最小二乘估计问题。在所有线性组合中,最小二乘估计量的均方误差最小。式(2)到式(4)中的优化问题是无法求解的NP-hard问题,所以通常要考虑近似的解法。目前国内外研究的求解算法可归入以下三大类[6-7]:贪婪追踪算法,这类方法通过每次迭代时选择一个局部最优解逐渐实现原始信号的逼近;凸松弛算法,这类方法通过将非凸优化问题转化为凸优化问题求解实现信号的逼近;组合算法,这类方法通过信号的采样支持通过分组测试快速重建。 为了构建特征矩阵,需对采集得到的船体样本与航道背景样本分别构建船体样本的特征矩阵D和航道背景样本的特征矩阵F。首先将船体样本和航道背景样本的尺寸归一化为60×120。然后对船体样本库与航道背景库中的样本进行下采样,采样频率越高,样本保留的细节信息就越多,相应地数据就越繁杂。针对样本库中含有的样本的个数以及下采样得到的信息的复杂度,对60×120大小的样本采用6×6的采样频率。将采样得到的数据按先后顺序排成一列,以此作为所采样样本的特征向量。最后分别将船体样本库和航道背景库采样得到的特征向量分别按列排列组成各自的特征矩阵D=[d1,d2,…,dn]和 F=[f1,f2,…,fn]。 其中 di和 fj分别为第 i个船体样本和第j个航道背景样本经下采样得到的单列向量,且di∈R200、fj∈R200。 图 2、图 3分别表示经下采样得到的部分船体样本特征矩阵和部分航道背景样本特征矩阵。 图2 Vessel characteristic matrixFig.2 船体特征矩阵 图3 Waterway characteristic matrixFig.3 航道背景特征矩阵 字典学习就是从数据中学习系数表示下的最优表示,使得字典中的原子尺度和特性更接近需要表示的测试信号。为获得性能优良且更为紧凑的冗余字典,需要对特征矩阵和进行训练学习得到表达能力更强的冗余字典D^和F^。 在字典学习领域MOD算法和K-SVD算法是其中典型的两种方法。MOD算法每次训练中都同时更新所有字典原子,以促进表述系数的稀疏化或表达误差的不断减少。相对应的K-SVD算法则是在多维向量的情况下,每一轮字典更新时遍历优化每一个向量,与MOD算法相比,K-SVD算法同时优化所有向量可以降低计算量,同时也可以避免陷入局部最小化问题。以特征矩阵D为例,K-SVD算法通过以下步骤[8]得到冗余字典 D^。 Step1:初始化字典 D^,D^∈Rt×s的随机矩阵,其中 t为船体样本特征向量的维度且s≤n,n为船体样本总数。对D^的列向量进行归一化处理。 Step2:稀疏编码阶段。将每个船体样本特征向量di用OMP追踪算法表示为字典D^的线性表示,即求解如式(5)所示的最优化问题: 其中di为第i船体样本特征向量,D^为初始化的字典,Γ^i为第个船体样本在字典D^表示下的稀疏系数,‖·‖0表示统计非零元数的个数,K为稀疏表示的稀疏阈值,且K≻0。 Step3:字典更新阶段。设定更新冗余字典D^的第ζ个原子d^ζ,则按以下方式更新。 ①定义使用d^ζ进行稀疏表示的船体样本集合ω: 其中,M≤n,n为船体样本总数,Γ^(ζ,:)为原子d^ζ对应的稀疏系数矩阵的第ζ行。 ②求误差矩阵,如式(7)所示: 其中,D为船体样本特征矩阵,di^为字典D^的第i个原子,为原子对应的稀疏系数矩阵 Γ^的第i行。 ③由误差矩阵Eζ选出仅与ωζ相对应的列,得到。 Step4:直到满足收敛条件,否则返回Step2。 正交匹配(OMP)算法[9]是在 MP算法[10]基础上改进得到的。此算法是从冗余字典中找出与待分解或者重构的信号最为匹配的匹配原子的经典算法之一。以冗余字典D^为例,设视频序列测试样本为 X。已知 D^=[,,…,],且‖‖2=1。具体过程如下所述: 算法输入:冗余字典D^,测试样本X,稀疏阈值K; 算法输出:稀疏系数矩阵Ψ; 初始化内容:残差γ0=X,系数稀疏矩阵Ψ初始化为空,稀疏度k初始化为1; Step1:找出残差γ和冗余字典D^的原子积中最大值所对应的脚标β,即 其中,γk-1是稀疏度为k-1时的残差,s为冗余字典D^的原子总数。 Step2:更新稀疏系数矩阵 Ψk=Ψk-1∪{βk},记录找到的冗余字典中的重建原子集合: Step3:由最小二乘得到: Step4:更新残差 γk=X-D^kΨk,k=k+1; Step5:判断是否k≻K,若成立,则停止迭代;若不成立,则返回Step1。 马氏距离是一种有效计算两个样本集相似度的算法,它考虑到了各种特性之间的联系,且是与尺度无关的 (scaleinvariant)。一般对于服从同一分布且协方差矩阵P的两个随机向量x,y∈Rm,其马氏距离可表示为: 其中P=Rm×n为随机向量的正定协方差矩阵。由式(11)可得原始测试样本X与重构得到的测试样本XD^与XF^之间的马氏距离可表示为: 其中,S1为(X-XD^)与(X-XD^)T的正定协方差矩阵,S2为(X-XF^)与(X-XF^)T的正定协方差矩阵。 在稀疏表示船体检测中若 d(X,XD^)≺d(X,XF^),说明原始测试样本与船体数据库更为接近,此时将原始测试样本判定为船体目标;反之,则判定为航道背景。最后,将判定为船体目标的测试样本进行目标标定。 为验证基于稀疏表示的船体检测算法在CCTV中的检测跟踪效果,本次实验所使用的实拍来自于长江入海口航道附近CCTV的监控视频,实验中使用的船体样本数据库和航道背景数据库是在指导老师和实验室成员的共同努力下建立的。图4显示的是部分船体样本数据库。 图4 Part of the vessel sample databaseFig.4 部分船体样本数据库 基于稀疏表示船体检测测试环境:普通计算机,其配置为英特尔 Xeon (志强)W3565 3.20 GHz、 四核 CPU、8G内存、Win7 Enterprise 64位 SP1(DirectX 11) 操作系统,MATLAB 7.12.0(R2011a)编程环境。 在CCTV监控视频对稀疏表示船体检测算法进行检验跟踪,图5为监控视频第六帧的检测跟踪结果,图6为第六帧图像中的根据冗余字典和得到的重构测试样本与原测试样本之间的马氏距离图谱。 图5 第六帧检测跟踪效果Fig.5 The detection tracking of sixth frame 图6 测试样本与重构样本间的马氏距离Fig.6 The markov distance between test sample and reconstruction sample 在实验中将基于稀疏表示的船体检测跟踪算法与传统的支持向量机(SVM)检测跟踪算法进行了对比分析。在SVM检测算法中,将船体样本按船体方向分为八类,提取船体的梯度直方图(HOG)[11]作为目标的特征向量,采用投票法[12]利用SVM实现多分类问题,最终将多类船舶检测结果合并为总的船体检测结果,并进行标记。下面是本实验得到的对比结果。 1)在单帧处理时间上如表1所示。 表1 两种检测算法单帧处理时间Tab.1 The time used in two algorithm of single frame 从上表中可以看出,在运行速度上基于稀疏表示(SRC)的船体检测算法是基于支持向量机(SVM)的5倍左右,可以更实时的处理检测任务。 2)监控视频前50帧的船体检测准确率与漏检率分别如图7、图8所示。 图7 船体检测准确率Fig.7 Vessel detection accuracy 图8 船体检测漏检率Fig.8 Vessel miss rate 在图7中可以发现基于稀疏表示的船体检测算法的准确率高于基于支持向量机的船体检测算法,且更稳定;图8中25帧以后出现基于稀疏表示的船体检测算法的漏检率高于基于支持向量机的检测算法,这说明在追求运行时间和检测准确率的目标基础上牺牲掉了船体的漏检率。但是在实验中发现,出现的漏检船体往往发生在海天线附近,这离航道内航行的船体目标距离较远,可以很好地保证船体的安全。 从上面比较很明显可以看出基于稀疏表示检测跟踪算法较SVM检测跟踪算法有明显优势,首先在运行时间上,稀疏表示的船体检测算法比基于支持向量机的船体检测跟踪算法快了很多,实时性比较好;其次在检测准确率上有明显的优势,检测准确率高,鲁棒性高。由此可以得出基于稀疏表示的船体检测算法可以更好地实现CCTV视频监控系统的自动或者半自动的控制。 [1]洪晶.海事场景的视频监控系统[D].浙江大学,2007. [2]李斌,孙华峰.内河运动船舶的准确检测跟踪技术研究[J].微电子学与计算机,2012,29(11):180-184.LI Bin,SUN Hua-feng.Research the inland river motion ships accurately detection and tracking algorithm[J].Microelectronics,2012,29(11):180-184. [3]叶玲利.内河视频监控中运动船舶检测和遮挡分离算法研究[D].汉理工大学,2013. [4]Olshausen B A,Field J.Sparse coding with an over-complete basis set:a strategy employed by v1[J].Vision Research,1997,37(23):3311-3325. [5]Wei Tang,Zhenwei Shi,Zhana Duren.Sparse hyperspectral unmixing using an approximate L0 norm [J].Optick,2013,125(2014):31-38. [6]李修志,吴健,崔志明,等.复杂交通场景中采用稀疏表示的车辆识别方法[J].中国图像图形学报,2012,17(3):387-392.LI Xiu-zhi,WU Jian,CUI Zhi-ming,et al.Sparse representation method of vehicle recognition in complex traffic scenes[J].Journal of Image and Graphics,2012,17(3):387-392. [7]Needell D,Tropp J.CoSaMP:Iterative signal recovery from incomplete and inaccurate samples[J].Communications of the ACM,2010,53(12):93-100. [8]肖玲,李仁发,曾凡仔,等.基于自学习稀疏表示的动态手势识别方法[J].通信学报,2013,34(6):128-135.XIAO Ling,LI Ren-fa,ZENG Fan-zai,et al.Gesture recognition approach based on learning sparse representation[J].Journal on Communications,2013,34(6):128-135. [9]PatiY C,Reza ifarR.K rishnaprased.Orthogonal matching pursuit:recursive function approximation with applications to wave le t decomposition[A]//Proceedings of the 27th Annual Asilomar Conference in Signals, Systems and Computers,November 1-3, 1993[C].Pacific Grove:IEEE Explore,1993. [10]尹忠科,邵君,Pierre Vandergheynst.利用FFT实现基于MP的信号稀疏分解[J].电子信息学报,2006,28(4):614-618.YIN Zhong-ke,SHAO Jun,Pierre Vandergheynst.MP Based Signal Sparse Decomposition with FFT [J].Journal of Electronics&Information Technology,2006,28(4):614-618. [11]Dalal N,Triggs B.Histograms of Oriented Gradients for Human Detection[M].CVPR,005. [12]陈中杰,蒋刚,蔡勇.基于SVM一对一多分类算法的二次细分法研究[J].传感器与微系统,2013,32(4):44-47.CHENZhong-jie,JIANGGang,CAIYong.Researchofsecondary subdivision method for one-versus-one multi-classification algorithm based on SVM [J].Transducer and Microsystem Technologies,2013,32(4):44-47.


1.2 特征矩阵构建
1.3 K-SVD字典学习



1.4 正交匹配(OMP)



1.5 基于马氏距离分类


2 实验结果及分析
2.1 实验数据

2.2 实验环境
2.3 检测跟踪结果

2.4 对比分析

3 结束语