胸鳍波动推进仿生机器鱼研究进展与分析
2014-01-13谭进波王扬威顾宝彤赵东标
谭进波,王扬威,顾宝彤,赵东标
(南京航空航天大学,南京210016)
0 引 言
随着对海洋资源开发利用的不断深入,海底勘探作业、海洋生态环境考察以及海洋军事战略等领域对自主水下机器人(AUV)的要求越来越高。作为自主水下机器人的一个分支,仿生水下机器人随着水动力学、仿生学和自动控制等学科的发展及先进制造技术、智能材料的应用,逐渐成为研究的热点[1-3]。
仿生水下机器人是一类以水生生物为仿生原型,模仿其游动或推进模式而设计出的能够实现水下交互作业的机器人[4],在众多水生生物中,鱼类因其非凡的水下运动能力以及游动时高效、低噪和高机动性的特点倍受各国仿生科研工作者的青睐。近几十年来,各类性能优异的仿生机器鱼相继问世,大大提高了仿生水下机器人的游动效率、机动性和应对水下复杂环境的能力,充分展示了其广阔的应用前景和潜在价值。仿生机器鱼根据其仿生原型游动方式的不同可分为两类:身体/尾鳍(body/caudal fin,BCF)推进模式和中央鳍/对鳍(median/paired fin,MPF)推进模式[5]。BCF 推进模式仿生机器鱼最早问世,经过近二十年的研究发展,已取得众多成果。MPF 推进模式仿生机器鱼虽然出现较晚,但在低速游动下的推进效率、机动性和稳定性较BCF 模式更为出色[6],更加适应水下勘测和侦察作业,其中鳐科模式(Rajiform)的胸鳍波动推进仿生机器鱼具有优异的游动性能,已成为仿生机器鱼研究领域的新兴热点。近年来,科研人员已对胸鳍波动推进机理进行了相关研究,并研制出了各类仿生机器鱼。
1 胸鳍波动推进模式特征
采用胸鳍波动推进模式游动的水生生物主要有软骨鱼纲中的鳐形目、鲼形目和乌贼等,依据对生物胸鳍波动运动的游动观测结果和理论分析,胸鳍波动推进模式的游动特征可归纳为:
(1)胸鳍围绕在身体两侧或周围,得益于软骨支撑结构或肌肉性静水骨骼结构,胸鳍能实现柔性的波动运动。
(2)胸鳍波动运动呈近似正弦波的形式,波动运动的幅度、频率和传播方向根据运动方式不同而各异,单侧胸鳍上呈现至少一个完整的推进波。
(3)通过双侧胸鳍的同步或异步波动配合鱼体可实现巡游、起/停、转向及姿态保持等游动动作[7],游动动作灵活,机动性高。
(4)巡游时胸鳍波动运动呈整数个波形,鱼体几乎不产生上下振动,没有尾鳍摆动鱼类的舵首摆动问题,游动稳定性好。
胸鳍波动推进水生生物所拥有的这些特征,使得以其为原型的仿生样机具有推进高效、低速稳定和高机动性的特点,同时样机主体不参与运动,可以降低样机的结构设计难度,提高承载能力,还能有效避免游动时身体摆动导致的形滞阻力[8]。
2 国内外研究现状
2.1 胸鳍波动推进机理研究现状
胸鳍的柔性波动运动是游动动力的主要来源,对其推进机理的研究不仅可以揭示此种游动模式高效、高机动的流体力学机制,还能为仿生机器鱼的研制提供简化的生物学、运动学及动力学模型。推进机理研究主要有理论研究、实验观测研究和数值模拟与仿真三种方法。国内外学者对鱼类推进理论开展了大量的研究工作,目前已发展成熟的波动推进理论根据其选取的主要作用力的不同可分为仅适用于微小水生生物游动时低雷诺数情况下的抗力理论和适用于鱼类游动时高雷诺数情况下的作动盘理论、细长体理论及波动板理论,以上推进理论主要用于BCF 推进模式的运动分析。鳍波动推进模式的理论研究起步较晚,但随着近年来重视程度的提高,其研究进展迅速。Daniel 通过应用非定常翼型理论和叶片元理论对鳐科模式水动力特性进行研究,分析了鳍形状和波动参数对推进性能的影响[9]。Lighthill 与Blake 应用由细长体理论(EBT)扩展而来的大摆幅细长体理论研究了鳞鲀科模式(Balistiform)和裸背鳗科模式(Gymnotiform)鱼类柔性长鳍波动的推进性能,试图揭示波动鳍与鱼体之间的相互耦合作用对推进性能的影响[10]。Rahman 等建立了双波动鳍仿生机器鱼模型的六自由度运动学方程,基于对模型试验与CFD(Computational fluid dynamics)计算的准定常假设,得到了模型运动产生的流体力和力矩的表达式[11]。国内的章永华等对仿生机器蓝点魟的胸鳍进行建模,得到了鳍条摆动和鳍面波动的运动学方程并计算了受到的流体阻力和蒙皮弹性变形阻力,最后采用大摆幅细长体理论得到了单位长度的鳍面在一定时间内运动所产生的平均推力[12]。中科院自动化研究所魏清平等对胸鳍模型的运动提出三点假设,从而得到了一个运动周期内胸鳍波动产生的平均推力的解析表达式,分析表明波动推进力的大小与胸鳍的摆动频率、幅度及波长、波数有关[13]。
实验观测研究是分析胸鳍波动推进机理最为直接的手段,分为仿生原型的观测研究和仿生样机的水下试验研究。仿生原型的观测研究主要通过高速摄影、肌电图(EMG)和数字式粒子图像测速(DPIV)等技术对仿生对象的形态学、生理学、运动学参数进行测量,研究这些参数与波动推进性能之间的关系。1999 年,Rosenberger 等采用摄影技术和EMG 技术对不同游动速度下蓝点魟的胸鳍运动模式和胸鳍肌肉驱动模式进行研究,研究表明胸鳍的波动运动是由背部和腹部肌肉交替活动产生;随着蓝点魟游速的增大,胸鳍波动频率、波速、波长及胸鳍肌肉活动的占空比均增加,而波幅和肌肉活动持续时间保持不变[14]。Blevins 和Lauder 通过三台高速摄像机获取淡水魟鱼在不同游速下胸鳍波动曲面的精确数据,首次对魟鱼波动胸鳍进行了三维运动分析,分析显示淡水魟鱼的游速主要由胸鳍波动频率和波速决定,波幅只起到次要作用[15]。随后他们又使用DPIV 技术研究了地面效应对波动鳍推进性能的影响[16]。仿生样机的水下试验研究是通过测试平台对样机的水下游动进行测试,分析胸鳍波动参数对推进性能的影响。荷兰代尔伏特理工大学的研究小组为研究胸鳍摆幅、频率和波数对推进力的影响,对仿生胸鳍模型进行了水下推进测试,试验结果显示推进力随波幅、波频的增加而显著增加,而随波数增加的趋势不明显[17]。章永华等对仿生蓝点魟胸鳍模型进行了试验,分析在波幅逐渐增大和等波幅两种胸鳍波动模式下,摆动频率、幅度和波长的变化对推进力的影响,并对两种波动模式的推进性能进行了比较[18]。魏清平等对双波动鳍仿生机器鱼样机进行了单侧胸鳍的推力试验和整体样机的游动试验,测量了直线游动速度和转动角速度随波动频率的变化,同时结合运动学和水动力学模型分析了波动参数与游动性能之间的关系[13]。
随着计算机技术的发展以及数值计算方法和流体仿真软件的成熟,计算流体力学(CFD)得到了广泛的应用,CFD 数值模拟与仿真也成为研究鱼类游动水动力学的有效方法。通过对胸鳍波动的流场控制方程进行数值计算,获取流场内各个位置上基本物理量(如速度、压力等)和涡流的分布特性,确定这些量随时间的变化情况,可以帮助揭示胸鳍波动推进模式的水动力学机制[19]。日本大阪大学的研究小组一直致力于使用CFD 方法研究仿生波动鳍的流体动力学,他们通过对双波动鳍仿生样机胸鳍周围的流场进行计算机数值分析,建立起波动侧鳍的主要运动参数与水动力之间的简单关系,其分析结果与样机的试验测量结果一致[20]。章永华等对仿生波动胸鳍模型进行了大量的数值研究,他们分别对不同运动参数、波动模式和鳍面形状下的波动鳍进行数值计算,分析它们对推进性能的影响,还研究了波动过程中的流场特性和尾迹涡结构,试图从涡动力学角度分析推力产生的机理[7,18,21]。陈维山等利用Fluent 软件仿真实现了仿鳐鱼机器人的自主游动,研究了鳐鱼游动时与周围流场的相互作用并定量分析了波动参数对游动性能的影响[22]。
2.2 胸鳍波动推进仿生机器鱼样机研制现状
国内外胸鳍波动推进仿生机器鱼的研制虽然起步较晚,但随着对胸鳍波动推进机理的逐步探索以及仿生技术、先进制造技术和控制技术的成熟,仿生机器鱼样机的研制已取得众多成果。
2002 年,加拿大英属哥伦比亚大学的研究小组对鳐科模式(Rajiform)在水下推进器领域的应用进行了初步探索和尝试。他们以小尾燕魟为原型研制了仿生胸鳍模型[23],如图1(a)所示。仿生胸鳍使用形状记忆合金(Shape memory alloy,SMA)丝作为鳍面的线性驱动器,能够产生期望的静态波形,但由于SMA 丝的安装等问题,难以获得理想的动态变形,胸鳍模型的游动试验结果显示其无法产生足够实现自驱动的推进力。
日本大阪大学的研究人员为研究环境扰动小、推进效率高的AUV,先后研制了四代仿乌贼双波动鳍水下机器人,目前用于试验的是2009 年研制的第四代样机[11,24],如图1(b)所示。第四代仿生样机的侧鳍由17 个伺服电机驱动,通过伺服控制器控制胸鳍的波动运动,样机能产生6 自由度运动,可自由航行和偏转且对流体的扰动很小。通过采用无线局域网通信技术和三向重力中心调整系统,解决了前一代样机通讯距离短及垂直重力中心调整存在局限的问题,增加了运动范围,提升了游动灵活性。
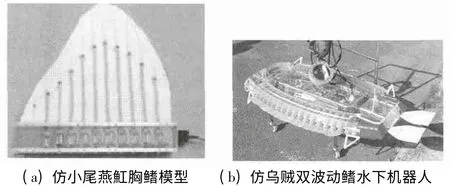
图1 加拿大英属哥伦比亚大学和日本大阪大学研制的仿生机器鱼样机
2005 年,新加坡南洋理工大学K. H. Low 等人采用模块化的概念研制了一款双鳍波动仿生机器鱼[25],如图2(a)所示。其单侧胸鳍可分为10 个鳍单元,每个鳍单元采用一台伺服电机在鳍条基部产生一个自由度的转动,连接于其上的曲柄作为鳍条,相邻鳍单元之间由柔性鳍膜通过滑块连接。通过控制伺服电机,使相邻的鳍条按一定的相位差摆动,从而在仿生胸鳍上产生不同波速、波幅及波数的类正弦波波形,水箱试验显示样机能实现20 cm/s 的最大游速。
日本名古屋大学的研究人员于2006 年研制了一款采用人工肌肉IPMC (Ionic polymer-metal composite)作为驱动器的仿鳐科模式机器鱼[26],如图2(b)所示。机器鱼的主体采用塑料泡沫制作,内置控制器、放大器、DC/DC 转换器和锂电池。单侧胸鳍由8 根IPMC 和一层聚乙烯薄膜组成,鳍长75 mm,宽45 mm。通过在不同的控制参数下对胸鳍进行游动试验,测得其最大推进速度为18.1 mm/s。

图2 新加坡南洋理工大学和日本名古屋大学研制仿生机器鱼样机
荷兰代尔伏特理工大学的研究小组于2009 年研制出了胸鳍波动仿生水下机器人Galatea[17],如图3(a)所示。Galatea 的壳体基于Wortmann FX 71-L-150/20 翼型设计,两侧各装有17 个伺服电机,通过带动鳍条摆动形成推进波,结合安装于机体尾部两块副翼的上下摆动,Galatea 可以实现前进、后退、俯仰、回转、绕垂直轴偏转及悬停等机动动作。
2010 年,麻省理工学院(MIT)研制了拥有柔性机体的仿魟鱼水下机器人[27],如图3(b)所示。通过参数化魟鱼的运动,提出简化的胸鳍驱动设计方法:胸鳍采用柔性材料制作,仅在其前端对称安装两根鳍条并由伺服电机驱动,身体中央安装用于控制沉浮的浮力箱。两款样机外形均模仿魟鱼,体长为0.225 m,图3(b)中左侧样机的胸鳍采用单一的硅橡胶制作,右侧的则由两种不同的硅橡胶制成。游动试验结果显示右侧样机的游动性能更好,在胸鳍摆动频率为2.5 Hz 时,最大游速能达到0.37 BL/s(每秒游过的体长倍数)。
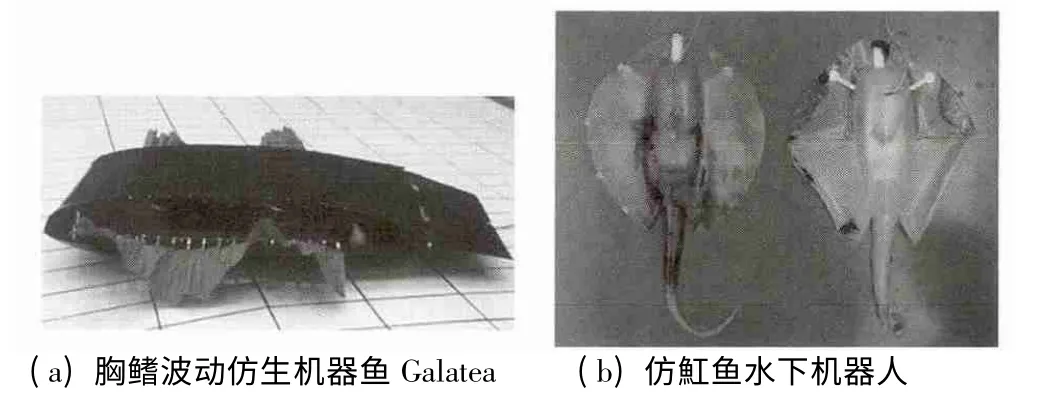
图3 荷兰代尔伏特理工大学和麻省理工学院研制的仿生机器鱼样机
国内也相继研制出多种胸鳍波动推进仿生机器鱼样机。2009 年,中科院自动化研究所研制了一台双波动鳍推进仿生机器鱼[13,28],如图4(a)所示。双侧胸鳍由均布的10 根鳍条和弹性薄膜组成,驱动器采用伺服电机,控制系统基于FPGA。通过对机器鱼运动控制策略进行设计,实现了样机不同的游动动作。水池试验显示其能完成前进、后退、旋转和侧向游动四种基本动作,当鳍条摆动频率为2.2 Hz时,最大游速能达到0.37 m/s。
中国科学技术大学章永华等人基于仿生对象蓝点魟的形态学、生理学及运动学特征研制了仿生机器蓝点魟[7,12]如图4(b)所示。仿生蓝点魟由8 对模块化的鳍条单元、固定底板、安装盒和重心调节机构组成。对仿生蓝点魟的机动性和稳定性游动试验表明其转弯半径很小,机动性高;游动的旋转角、俯仰角和偏航角波动不大,稳定性好。
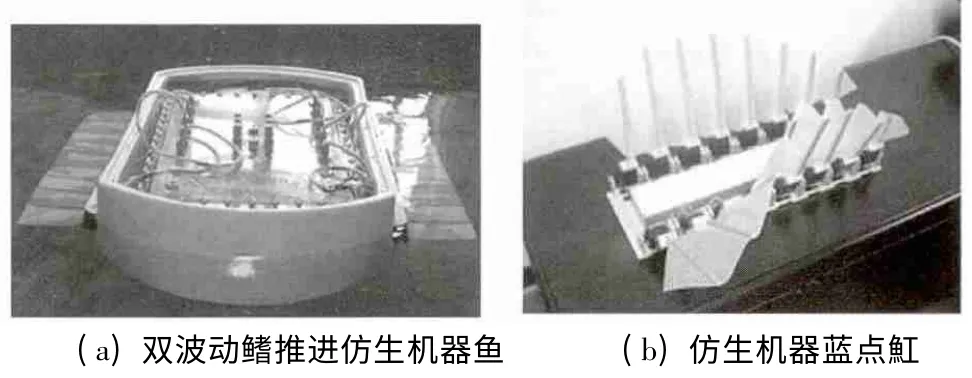
图4 中科院自动化研究所和中国科学技术大学研制的仿生机器鱼样机
2008 年,哈尔滨工业大学王振龙等人研制了仿乌贼鳍水下推进器[29],如图5(a)所示。仿生推进器采用由5 对SMA 丝驱动的柔性鳍单元模拟乌贼胸鳍的肌肉性静水骨骼结构。游动试验显示胸鳍能够实现柔性的动作,最大游速达到了40 mm/s,最大转向速度能达到22 (°)/s。随后又研制了一款采用鳍波动推进和喷射推进复合运动方式的仿生墨鱼水下机器人[30-31],如图5(b)所示。其波动胸鳍同样采用SMA 丝驱动,喷射推进则由仿生外套膜的柔性扩张和收缩实现。游动试验显示样机能实现前进、后退和原地转弯等机动性动作,鳍波动推进的最高游速可达25 mm/s,旋转游动速度可达9 (°)/s;喷射推进的最大速度能达到35 mm/s。
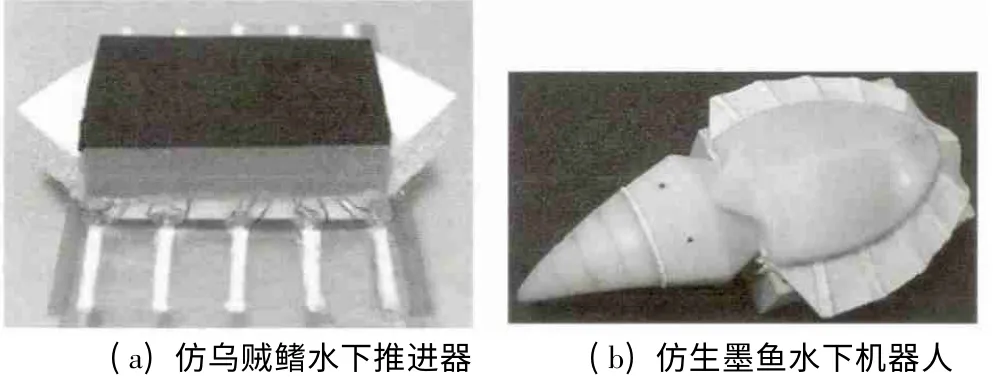
图5 哈尔滨工业大学研制的仿生机器鱼样机
3 胸鳍波动推进仿生机器鱼研究的关键技术
(1)胸鳍波动推进机理研究
胸鳍波动推进机理的研究能够揭示其高效高机动的流体动力学机制,为仿生机器鱼的系统设计提供理论基础。胸鳍波动推进理论在对波动游动过程做出假设的基础上建立波动运动学和水动力学模型,可用于分析波动运动与流体力之间的关系。实验观测研究不仅能分析胸鳍生理学、运动学等参数对波动推进性能的影响,还能为理论推导结果提供验证,为仿生机器鱼样机的设计提供实验数据。CFD 数值模拟与仿真技术可以揭示波动运动的流场特性和尾迹涡街的分布情况,也能对仿生机器鱼样机设计进行优化。以上三种研究方法均有各自的优点,因此,通过将这三种方法巧妙地结合,系统地开展胸鳍波动推进机理的研究,能够起到相互补充、相互验证的作用,为胸鳍波动推进仿生机器鱼的研制提供指导。
(2)仿生柔性胸鳍及机器鱼结构设计
目前,胸鳍波动推进仿生机器鱼胸鳍的设计主要基于“结构仿生”思想,大多采用刚性骨架和柔性鳍膜模拟仿生原型胸鳍的组成,但仿生胸鳍的刚性结构无法实现鳍面的复杂运动变形,胸鳍波动动作的柔性及推进性能与仿生原型仍有一定差距。因此,合理选择仿生胸鳍鳍条的数量、材料、长度、沿机体的分布以及鳍膜的材料和形状,可以有效提升胸鳍波动柔性及样机整体的游动性能。
胸鳍波动仿生机器鱼的主体设计包括主体外形设计和内部结构设计。流线型的主体能够极大提升机器鱼水下游动性能,提高游动速度;合理的机体内部结构可以提高机器鱼的防水耐压性能,增加载重量,因此,利用流体仿真软件对仿生机器鱼外形进行优化设计以及对样机内部进行合理布置是胸鳍波动仿生机器鱼能够实际应用的关键技术。
(3)多游动模式融合推进技术
已研制的胸鳍波动仿生机器鱼具有较高的机动性和稳定性,但样机整体的推进速度较低。因此,通过采用多游动模式融合推进技术,在胸鳍波动推进的基础上融合尾鳍或喷射等推进技术,合理地配置各个推进技术的使用,可以使机器鱼兼具机动性与快速性。研究不同推进模式之间的耦合作用,将为兼具高速、高效、高机动性的多游动模式融合推进技术提供理论基础和技术支撑。
(4)驱动及控制技术
现有的胸鳍波动仿生机器鱼多采用机电驱动系统,以伺服电机作为鳍条驱动器,但传动机构较复杂,效率低、噪声大,而使用智能材料作为胸鳍驱动器可以简化系统结构,提升动作柔性,是未来驱动技术的发展方向。良好的运动控制是仿生机器鱼进行水下作业的前提和保障,面对复杂、动态的水下环境,机器鱼必须能够及时改变波动运动参数,调整姿态,躲避障碍物。通过采用先进的仿生控制技术如CPG(Central pattern generator)生物神经网络控制技术,实现胸鳍的节律运动,同时结合外部反馈信息对机器鱼的姿态和运动进行控制,具有比传统控制方法更好的柔性、实时性和适应性。
(5)电源供给与通讯技术
电源供给和通讯是制约仿生机器鱼作业时长和距离的关键因素。通过提升电池性能,降低机器鱼能耗以提升续航时间,同时研究太阳能、潮汐能等新能源技术以寻求能源持续供给的可能。先进的通讯技术如无线局域网技术的使用可以增加机器鱼的活动范围,但要面向实际的应用,需要开发出通讯范围更广、实时性更高的通讯技术。
4 结 语
胸鳍波动推进仿生机器鱼的游动具有高效、高机动性和稳定性的特点,逐渐成为仿生机器鱼领域新的重要研究方向。目前,国内外科研人员采用理论研究、实验观测研究和数值模拟仿真的方法开展了胸鳍波动推进机理的研究,为胸鳍波动仿生机器鱼的设计提供了理论基础,国内外也涌现了一批胸鳍波动推进仿生机器鱼。随着相关技术的不断发展,这一推进模式仿生机器鱼的机体结构将趋于合理,流体载荷分布将更加均衡,运动参数控制也更为灵活,在海洋及河流水质监测、船舶水下检测与维修、水下军事侦察等领域拥有广阔的应用前景。
[1] BANDYOPADHYAY P R.Trends in biorobotic autonomous undersea vehicles[J]. Journal of Oceanic Engineering,2005,30(1):109-139.
[2] 杭观荣,曹国辉,王振龙,等.SMA 驱动的仿生机器人研究现状及其展望[J].微特电机,2006,34(11):4-8.
[3] 王扬威,王振龙,李健.微小型水下仿生机器人研究现状及发展趋势[J].微特电机,2010,38(12):66-69.
[4] 王田苗,杨兴帮,梁建宏.中央鳍/对鳍推进模式的仿生自主水下机器人发展现状综述[J].机器人,2013,35(3):352-362.
[5] SFAKIOTAKIS M,LANE D M,DAVIES J B C. Review of Fish Swimming Modes for Aquatic Locomotion[J]. Journal of Oceamic Engineering,1999,24(2):237-252.
[6] SUZUKI K,KATO N,SUZUMORI K. Load characteristics of mechanical pectoral fin[J].Journal of Exp.Fluids,2007,44(5):759-771.
[7] 章永华.柔性仿生波动鳍推进理论与实验研究[D]. 合肥:中国科学技术大学,2008.
[8] 谢海斌.基于多波动鳍推进的仿生水下机器人设计、建模与控制[D].长沙:国防科学技术大学,2006.
[9] DANIEL T L.Forward flapping flight from flexible fins[J].Canadian Journal of Zoology,1988,66(3):630-638.
[10] LIGHTHILL J,BLAKE R. Biofluiddynamics of balistiform and gymnotiform locomotion.Part 1.Biological background,and analysis by elongated-body theory[J].Journal of Fluid Mechanics,1990,212:183-207.
[11] RAHMAN M M,MIKI H,SUGIMORI S,et al. Development of a real time simulator based on the analysis of 6-degrees of freedom motion of a biomimatic robot with two undulating side fins[J].Journal of Aero Aqua Biomechanisms,2013,3(1):71-78.
[12] 章永华,何建慧. 仿生蓝点魟的结构设计及建模[J]. 机械科学与技术,2012,31(4):627-632.
[13] WEI Q P,WANG S,DONG X,et al.Design and kinetic analysis of a biomimetic underwater vehicle with two undulating long-fns[J].Acta Automatica Sinica,2013,39(8):1330-1338.
[14] ROSENBERGER L J,WESTNEAT M W. Functional morphology of undulatory pectoral fin locomotion in the stingray taeniura lymma(chondrichthyes:Dasyatidae)[J].The Journal of Experimental Biology,1999,202:3523-3539.
[15] BLEVINS E L,LAUDER G V. Rajiform locomotion:three-dimensional kinematics of the pectoral fin surface during swimming in the freshwater stingray Potamotrygon orbignyi[J].The Journal of Experimental Biology,2012,215(18):3231-3241.
[16] BLEVINS E L,LAUDER G V. Swimming near the substrate:a simple robotic model of stingray locomotion[J].Bioinspiration &Biomimetics,2013,8(1):016005.
[17] SIMONS D G,BERGERS M M C,HENRION S,et al. A highly versatile autonomous underwater vehicle with biomechanical propulsion[C]//Proceedings of Oceans 2009 IEEE Bremen:Balancing Technology with Future Needs,Piscataway,NJ,USA.2009:1-6.
[18] 章永华,何建慧,贾来兵.仿生蓝点魟胸鳍在两种波动模式下推进力的比较[J].机械工程学报,2012,48(18):166-176.
[19] 王福军.计算流体动力学分析-CFD 软件原理与应用[M].北京:清华大学出版社,2004.
[20] RAHMAN M M,TODA Y,MIKI H. Computational study on a squid-like underwater robot with two undulating side fins[J].Journal of Bionic Engineering,2011,8(1):25-32.
[21] ZHANG Y H,JIA L B,ZHANG S W,et al. Computational research on modular undulating fin for biorobotic underwater propulsor[J].Journal of Bionic Engineering,2007,4(1):25-32.
[22] CHEN W S,WU Z J,LIU J K,et al.Numerical simulation of batoid locomotion[J].Journal of Hydrodynamics,2011,23(5):594-600.
[23] BIOLEAU R,FAN L,MOORE T.Mechanization of rajiform swimming motion:the making of Robo-ray[R].Engineering Physics Project Laboratory,Applied Science 479 Final Report,Project Number 0159,University of British Columbia,2002.
[24] RAHMAN M M,SUGIMORI S,MIKI H,et al. Braking performance of a biomimetic squid-like underwater robot[J].Journal of Bionic Engineering,2013,10(3):265-273.
[25] LOW K H,WILLY A.Development and initial investigation of ntu robotic fish with modular flexible fins[C]//Proceedings of the IEEE International Conference on Mechatronics & Automation.IEEE,2005:958-963.
[26] TAKAGI K,YAMAMURA M,LUO Z W,et al.Development of a rajiform swimming robot using ionic polymer artificial muscles[C]//Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEE,2006:1861-1866.
[27] ALVARADO P V,CHIN S,LARSON W,et al.A soft body under-actuated approach to multi degree of freedom biomimetic robots:A stingray example[C]//Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Tokyo,Japan:The University of Tokyo,2010:473-478.
[28] SHANG L J,WANG S,TAN M,et al.Motion control for an underwater robotic fish with two undulating long-fins[C]//Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference.2009:6478-6483.
[29] 杭观荣,王振龙,王扬威,等. 肌肉性静水骨骼原理的仿乌贼鳍推进器[J].哈尔滨工业大学学报,2009,41(11):59-64.
[30] 王扬威.仿生墨鱼机器人及其关键技术研究[D]. 哈尔滨:哈尔滨工业大学,2011.
[31] 高飞,王玉魁,王振龙,等. 形状记忆合金丝驱动的仿生墨鱼水下机器人的原型设计[J].机器人,2013,35(3):346-351.
