全数字无刷直流电动机伺服控制系统设计
2014-01-13胡昌华方世鹏
陈 墨,胡昌华,张 伟,方世鹏
(第二炮兵工程大学,西安710025)
0 引 言
作为导弹控制系统中的执行机构,伺服机构接收弹上姿态控制系统给出的控制指令,调整发动机喷管的摆角,以改变发动机的推力矢量,从而使导弹改变飞行姿态或克服干扰,按预定弹道稳定飞行。根据伺服机构中信号和能量传递介质的不同形式,可将导弹伺服机构划分为电液伺服机构、燃气伺服机构和电动伺服机构[1]。现役导弹多采用电液伺服机构作为执行机构,电液伺服机构采用液压油作为能源,虽然具有动态特性好、输出精度高、输出功率大等特点,但存在结构复杂、加工精度高、体积重量大、价格昂贵、技术难度大、难维护,以及清洁度、气密性要求高等缺点。而电动伺服机构相比于其它两者,具有更加理想的运动方式,省去了油箱、油泵、蓄能器及各种阀、过滤器、传感器等系统构件,大大简化了机构设计的复杂性。同时,该机构具有控制精度高、可靠性较高、储存性能好、抗污染能力强等优点,故研究并设计电动伺服机构对于国防和军事的建设发展具有重要意义。因无刷直流电动机具有结构简单、寿命长、效率高、控制简单以及较好机械特性等优点[2],结合某型号导弹的电源配电系统工作实际以及伺服机构的使用工况和技术要求,本文设计的电动伺服机构选取额定电压为28V(DC)的无刷直流电动机作为驱动电机。
1 机构组成及控制原理
该电动伺服机构由伺服电动机、伺服电动机驱动器、制动电阻、减速器、位置反馈装置(编码器)、极限位置限位装置、伺服作动器、伺服装置本体、气压平衡装置及传动装置组成,其中电动伺服机构及传动装置主要包括减速器、齿轮副、滚珠丝杠副、轴承组、推杆、缸筒等。该机构将无刷直流电动机与行星滚珠丝杠设计成整体,通过4 个齿轮副与滚珠丝杠副机械运动转换力矩,转变运动方式,即将无刷直流电动机的旋转运动转换成行星滚珠丝杠的直线运动。丝杠通过伸缩带动推杆运动控制喷管摆角,改变导弹的飞行姿态,实现对导弹姿态运动的控制。
这种设计优点很多,在电动伺服机构运动全过程中能够通过失电制动器实现锁定功能;能够实时反馈伸出行程,运行中间位置停止,重新启动后反馈当前的绝对位置;当指令行程超出极限位置时,能够提供可供I/O 端口接收的故障反馈信号,及时给出控制动作,以及过压保护、极限限位、报警等功能,大大提高了系统的可靠性与稳定性,节约了使用成本。
2 系统总体方案设计
该电动伺服系统主要由DSP 主控电路、功率驱动电路、主电路、信号检测电路组成,如图1 所示。
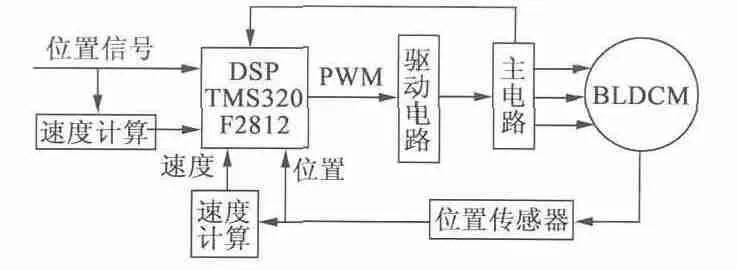
图1 系统设计总体框图
位置信号由上位机给出,速度信号由位置信号经计算得出,主控芯片选用 TI 公司生产的TMS320F2812。它是一款新型32 位定点DSP 芯片,其片内带Flash 存储器,工作频率达到150 MHz,集成了多种外设,非常适用于电机控制领域[3-4]。
系统设计采用全数字三闭环控制方式,控制框如图2 所示。上位机通过1553B 总线给出位置信号,位置传感器检测伺服机构的实际位置,经过微分计算得到速度信号,经过DSP 算法处理,产生一定脉宽占空比的PWM 波驱动控制电机,然后通过减速器与行星丝杠副的作用使推杆作直线运动驱动负载。图2 为机构控制原理图。
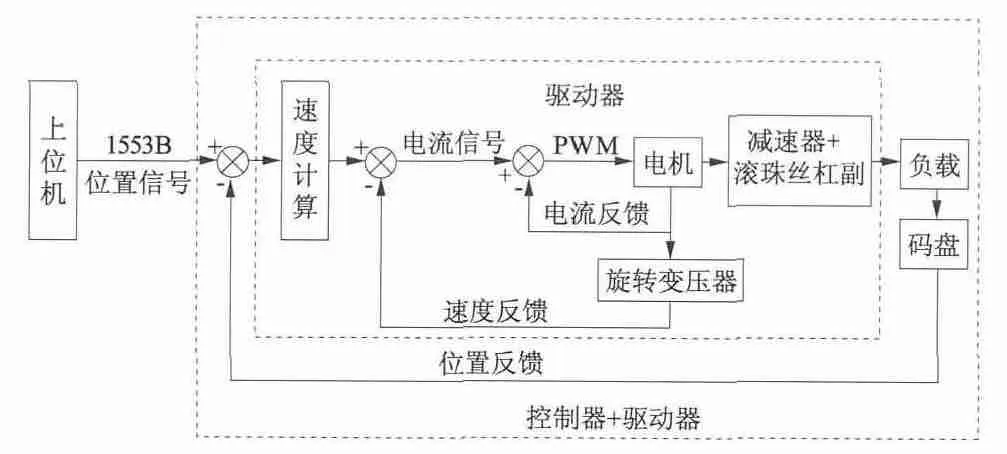
图2 机构控制原理图
3 系统模型的建立
3.1 无刷直流电动机
根据伺服机构的使用工况及实际技术要求,选用额定电压为28 V,额定功率为2 000 W,工作时间为5 min 的两级三相无刷直流电动机。忽略齿槽效应、磁路饱和,得相电压方程[5]:
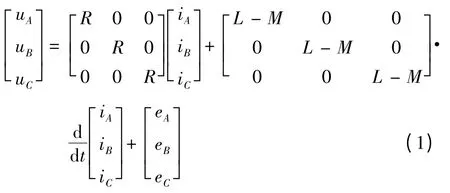
式中:R 为相绕组;i 为相电流;L 为绕组自感;M 为绕组互感;eI为相反电势。
电机的运动方程:

式中:Te为电磁转矩;TL为负载转矩;J 为转子转动惯量;ω 为电机机械角速度;Bv为粘滞摩擦因数。
对式(1)、式(2)进行拉氏变换,得:
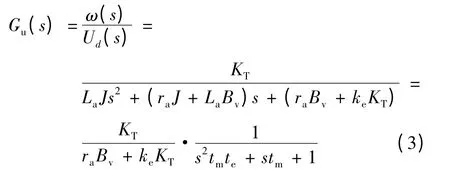
忽略te的影响,则式(4)可简化为一阶模型:

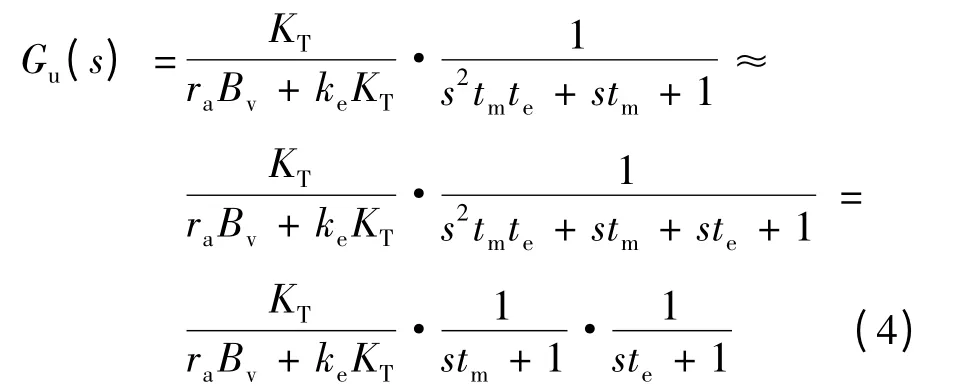
传递函数框图如图3 所示。
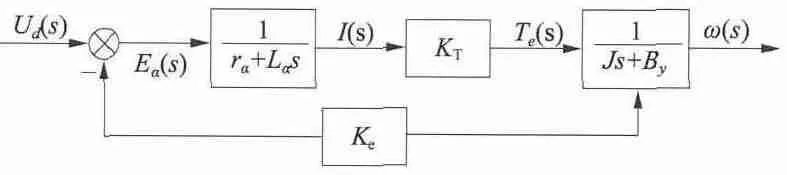
图3 传递函数框图
3.2 控制模块
该部分为整个系统的核心,由三闭环构成。电流环响应时间短,采用PI 控制算法,防止溢出。速度环为内环,采用改进型的PI 控制算法,提高其抗干扰能力。位置环是外环,其决定系统的静、动态性能,设计采用CMAC(小脑神经网络)与PID 复合控制的控制算法[6-7]。伺服系统通过前馈控制在线整定kp,ki,kd的值,改善机构的运动性能,以达到最大限度满足伺服机构在不同工况条件下高质量的运动控制效果。
3.3 驱动、换向模块
驱动功率模块以IGBT 为电力电子器件,采用全桥两两导通方式。电机驱动的关键是定子绕组的换相,定子绕组的换相及导通时间通过位置反馈装置控制[8]。该机构位置反馈装置采用分辨率为0.001 mm 的光电式多圈绝对值编码器。该编码器通过测量丝杆的旋转圈数,反馈电动伺服机构推杆行程,采用绝对值编码器可在断电后保存电动伺服机构的绝对行程。
4 系统的软、硬件设计
硬件设计如图4 所示。核心处理器为DSPTMS320F2812,外围电路有限位开关电路、过热保护输出电路、失电制动器锁定电路、极限限位电路,故障报警电路、电源电路。导弹在飞行过程中发生俯仰、偏航、滚动运动时,姿态控制系统给出控制信号,伺服机构通过弹上1553B 总线接收这些控制信号,将这些控制信号经过DSP 算法以及软件的调试获得控制量,控制电机的旋转运动,再通过减速传动装置带动丝杠运动,丝杠通过推杆作用于喷管上实现对导弹姿态运动的控制。
图4 硬件原理框图
软件程序流程如5 图所示。
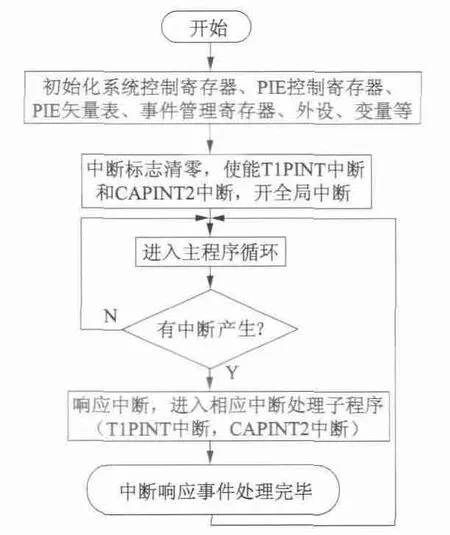
图5 软件程序流程
5 系统仿真
被控对象为无刷直流电动伺服机构,考虑负载为一阶惯性环节,电机选用三相六状态120°导通方式,定子相电枢绕组R =0.905 Ω,定子相电枢电感L=0.28 ×10-3H,转动惯量J =0.25 ×10-3kg·m2,极对数p =2,粘滞摩擦因数Bv=1.35 ×10-4N·m·s,电机供电电压为28 DCV,系统采样频率为20 kHz。无刷直流电动机模块采用Simulink 库中的Permanent Magnet Synchronous Machine 模块,设置参数时,将反电势波形选择为梯形波,得到无刷直流电动机模型;IGBT 模块使用Universal Bridage 模块,将电力电子功率器件设置为IGBT。在MATLAB/Simulink 环境下进行仿真[7]。
初始时,系统空载起动,给定初始转速为2 500 r/min;在1 s 内,行星滚珠丝杠副行程给定为0,系统只有电流环和速度环参与控制,待系统稳定后,在t=1 s 时给定行程为4 mm,此时位置环参与控制,系统实现三闭环控制;进入稳态后,在t =1.2 s 时突然加入3 N·m 的负载,此时转速突然减小,等到系统再次稳定;在t=2 s 时重新给定行程为19 mm,转速迅速增长而后稳定。系统的仿真曲线如图6 所示。
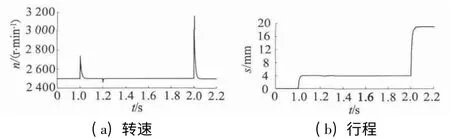
图6 系统仿真曲线
从仿真曲线可以看出,初始时,给定行程为0,位置环不参与控制,系统响应平稳,静态误差小;在t=1 s 前系统达到稳定状态,待系统接收到推杆行程指令,在该行程的电机转速下系统达到稳定的时间只有25 ms,无超调,实时性较好,稳态误差小于1 mm;t=1.2 s 时系统加入负载,转速很快达到给定值,系统经30 ms 后重新稳定。
6 结 语
本文分析了现役导弹伺服机构存在的不足,结合弹上伺服机构使用工况和技术指标要求,提出了一种新的电动伺服机构设计,给出了系统整体设计方案,分析了其组成、原理,并进行了软硬件的原理设计,在MATLAB/Simulink 环境下进行了仿真,验证了机构设计的可行性。仿真结果表明,选用的控制算法能够满足系统的预设指标,对后续电动伺服机构工程的整体实现与应用具有较大的理论指导意义。
[1] 胡昌华,马清亮,郑建飞. 导弹测试与发射控制技术[M]. 北京:国防工业出版社,2010.
[2] PILLAY P,KRISHNAN R. Application characteristics of permanent magnet synchronous and brushless DC motors for servo drives[J]. IEEE Transactions on Industry Application,1991,27(5):986-996.
[3] 王国伟,赵吉文.基于DSP2812 的无刷直流电机控制系统研究[D].安徽:安徽大学,2010.
[4] LUOYang,LI Hui,SHEN Ming-yong. Speed control of BLDCM for industrialsewing machine based on dSPACE[C]//2006 IEEE International Conference on Mechatronics and Automation. 2006:2127-2132.
[5] 夏长亮. 无刷直流电机控制系统[M]. 北京:科学出版社,2009.
[6] 李建更,王婕,于建均,等.基于CMAC-PID 控制器的水压加载系统研究[J].计算机测量与控制,2008,6(7):969-971.
[7] 姜静,崔涛,张超. 基于CMAC 神经网络的PID 控制算法在温度控制中的仿真研究[J].仪表技术,2013(6):34-36.
[8] 杨玉巍,田梦君.基于DSP 的无刷直流电机模糊控制系统研究[D].西安:西北工业大学,2006.
[9] 黄忠霖,黄京.控制系统MATLAB 计算及仿真[M].第3 版.北京:国防工业出版社,2010.
