电动轮驱动系统设计与控制策略研究
2014-01-13孙会来张文明田海勇郑舒阳
孙会来,金 纯,张文明,田海勇,郑舒阳
(1.北京科技大学,北京100083;2.中国北车股份有限公司,北京100083)
0 引 言
电动轮驱动控制系统是电传动车辆的运行核心,当在牵引工况运行时,能量从柴油机、发电机传递到轮边牵引电机,行驶路况复杂多变对牵引电机的控制提出了更高的要求,这种电传动的方式广泛应用于装甲车、工程车辆、机车等领域[1~3]。牵引电机驱动系统与整车综合性能匹配及合理控制策略的实施成为电传动系统需解决的重要问题。
近年来,在广泛应用的异步电动机控制中,各种智能方法得到了广泛的应用。磁场定向控制始终是调速的基础。基于自适应全阶观测器的转子磁链观测技术已经成为了一个热门的研究课题。基于电机模型的开环磁链观测,以及观测器的闭环磁链观测也被广泛的采用和研究[4]。车辆行驶作为一个多工况的复杂驱动系统,电机设计及控制研究往往没有很好结合在一起。
本文基于车辆牵引控制,从建立异步电机物理模型入手,建立了基于转子磁场定向矢量控制方法的数学模型及实现方法。论述了基于Simulink 软件的交流异步电机矢量控制算法与基于转子磁场定向的矢量控制。针对行驶路况复杂多变的特点,提出了以功率为外环并通过斜坡给定的矢量控制策略,来控制车用异步牵引电机,硬件系统以数字处理器DSP 与CPLD 为核心,搭建了牵引异步电机实验平台,通过实验验证电机静止加速起动工况,及车辆先加速行驶后减速行驶工况。实验数据结果表明采用该控制算法的逆变器能够适应负载的各种变化,满足对路况复杂多变的要求。
1 基于转子磁链的异步电机矢量控制方法
1.1 基于转子磁场定向的异步电机数学模型
通常,交流异步电机在两相旋转坐标系d、q 下的数学模型时,只规定d、q 轴的相互垂直关系,并未确定交流异步电机旋转磁场的相对位置。取d 轴与转子磁链矢量ψr重合,而q 轴相对于d 轴逆时针旋转了90°,成垂直关系,则转子磁链矢量ψr与q 轴互相垂直,q 轴上的分量为零[5]。即:

将d 轴称之为M 轴,垂直于d 轴的q 轴称之为T 轴。这样就用旋转的M、T 坐标来代替d、q 坐标,称之为按转子磁链定向的旋转坐标系。可以推出在M、T 坐标系下的异步电机电压方程表达式:
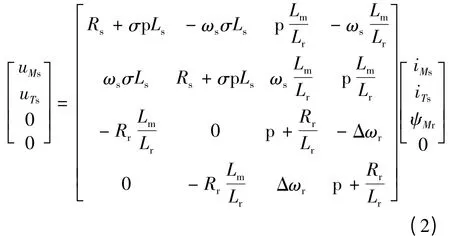
1.2 M、T 旋转坐标系下的矢量控制方程
由简化的鼠笼型交流异步电机的电压方程式可以推出转子磁链的M 轴分量[6]:

由式(3)可以看出,转子磁链只与电机定子电流的M 轴上投影分量iMs有关,称其为定子电流的励磁电流。同时,由式(3)可以看出,励磁电流iMs和转子磁链ψMr两者之间存在一阶惯性环节,与直流电机的励磁绕组惯性相同,即当励磁电流iMs变化时,转子磁链ψMr的变化受励磁惯性的影响。由式(2)第四行可以推出稳态时电机转差:

转矩方程:

在具体的控制电路中,可在转速闭环后增加转矩控制内环,可抑制磁链的扰动,提高转速的响应速度。给定转速nref与检测转速反馈量nfk的偏差经转速PI[7]调节器输出用于控制转矩电流T 轴的给定分量iTref。电路中的磁链调节器用于对电机定子磁链的控制,并设置了电流变换和磁链观测环节。电流反馈量的偏差经过电流PI 调节器,分别输出M、T旋转坐标系下的电压分量再经过Park 逆变换[8]得到α、β 坐标系下的定子电压矢量分量,经过SVPWM 技术,产生PWM 控制信号,最终控制电机定子的三相输入电流。
2 基于功率外环的电传动驱动系统设计
采用以速度为外环的控制策略,电机可以被控制在设定的转速下平稳运行,但在程序仿真运行初始阶段,由于速度的反馈量比较小,则会引起其与给定值偏差较大,从而导致电机在起动的瞬时电流波动较大,这样会对车辆在起动的时候造成较大冲击,可能引起逆变器的过流保护,使车辆无法起动。
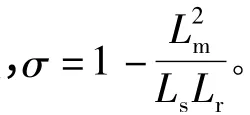
基于以上分析,采用以功率为外环并通过斜坡给定的控制策略,实现对交流异步电动机的转矩控制,控制系统总体设计如图1 所示。由于在实际的车上速度传感器一般采用光电式或磁电式,在低速时或是速度波动比较大时,速度信号的采集会受到很大影响。因此,本文采用功率为外环的矢量控制方法,功率的给定由油门踏板来控制,功率的反馈通过采集直流母线的电压和电流信号得出。显然电压和电流信号的反馈要比速度信号精确、可靠,可以实时反应系统的实际功率。功率斜坡给定用于给定回路,限制给定信号的变化率,减小其与反馈值的偏差,从而限制电机转矩变化率,减小电动机起动电流,保护机械结构。
图1 基于功率外环的控制系统总体设计
3 交流异步电机矢量控制仿真
根据以上电机驱动系统的控制思路,建立MATLAB/Simulink 仿真框图,其中选用软件自带的电机以及逆变器模块,并根据具体实验设备加以参数更改和匹配,最终组成交流异步电动机矢量控制仿真系统,如图2 所示。
根据Simulink 模拟车辆由静止到匀速行驶工况,系统的仿真模型结果如图3 ~图4 所示。图3为电机转速随时间曲线,由图中所示的波形可以看出,在转子磁链矢量控制技术下,电机转速平稳上升,有部分时间出现超调现象,但很快恢复最终稳定到目标转速380 r/min。图4 为电机扭矩随时间变化输出仿真曲线,由于电机本身的惯性,在起动的最初1 s 内电机出现超调,逆变器输出三相电流在起动的时候偏大,但很快降到平稳状态。通过上述仿真分析可知,采用矢量控制技术可以使电机快速平稳地达到一个平稳状态,有利于车辆安全行驶。
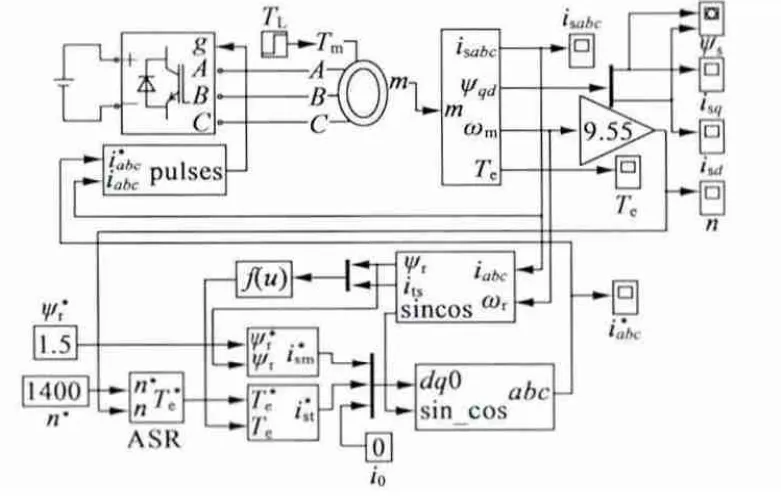
图2 交流异步电动机矢量控制仿真框图
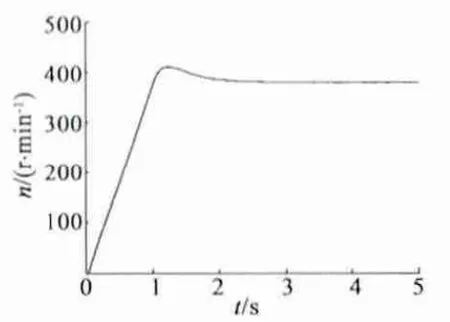
图3 静止起动电机转速模拟曲线图
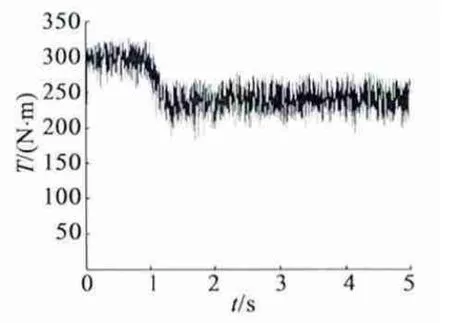
图4 静止起动电机输出扭矩模拟波形图
4 试验验证
根据异步电动机矢量控制系统实验原理框图搭建实验平台,现场实验平台搭建如图5 所示。在实验中采用交流380 V 电网供电,通过可调变压器将电压调到所需要的数值上,然后通过整流器将交流整成直流电,采用功率为外环的矢量控制算法来控制牵引异步电机的动态特性。
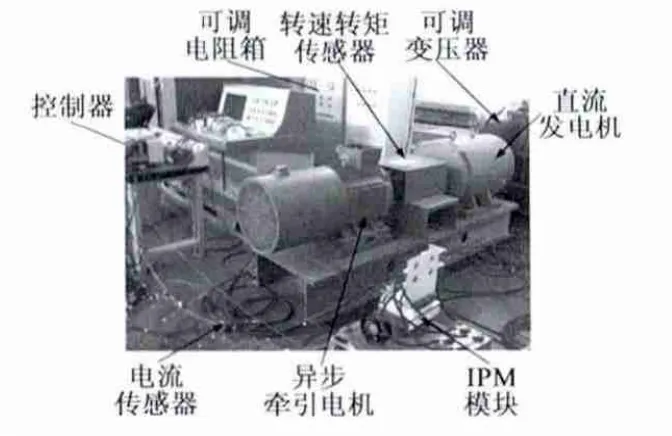
图5 异步电动机牵引实验平台
异步电机与直流发电机中间轴接一转速转矩传感器,转速信号作为反馈信号经过调理作为矢量控制系统的输入信号,转矩信号可反映电机的动态响应特性。通过调节发电机的励磁来实现对不同负载工况的模拟,实验中产生的能量可以由电阻散热消耗。
该实验平台上可以完成模拟电机静止加速起动工况,模拟车辆先加速行驶后减速行驶工况。在牵引实验时功率给定由电位器调节,电压、电流、转速以及转矩由相应的传感器检测采用CAN 总线与上位机和其它控制单元进行通信。通过软件可以获得功率给定与反馈、id给定与反馈、iq给定与反馈、逆变器输出电流、直流母线电压和电流、转速、PI 控制器输出量等参数。
(1)实验模拟自卸车空载起动过程
当车辆由静止起动时,为保证车辆的平稳起动,则逆变器不能出现超调、振荡以及过流保护现象。基本空载实验时首先通过电位器调节功率给定值,设定好励磁调节初始值,然后起动异步电动机,待电机运行平稳时停止实验。图6 为实验过程中电机输出转速变化曲线,从图中可以看到电机转子由静止很快上升到380 r/min 左右,由于内部PI 控制器作用,开始时转速有稍许波动,但经过大约10 s 左右逐渐稳定,系统运行平稳。从图7 的电机输出扭矩波形可以看出,没有出现较大波动,在接受范围内。电流在起动的瞬时也没有出现过流、超调现象,随着转速升高,电流波形变化频率逐渐变快,最后趋于稳定。通过空载起动实验可以看出,电机动态响应良好,说明采用功率外环矢量控制的异步电动机可以平稳地实现静止加速起动。
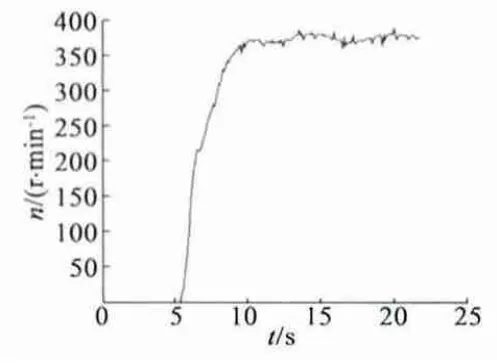
图6 电机输出转速变化曲线
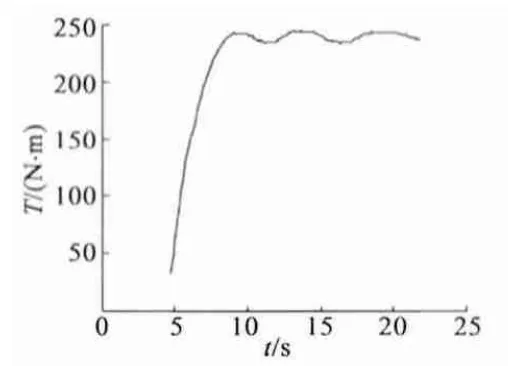
图7 电机输出扭矩变化曲线
(2)实验模拟自卸车加速减速过程
车辆在平直路面行驶时,假设路面摩擦系数不发生变化,当驾驶员想加速行驶,通常加大油门,这时发动机输出的功率会提高,同时扭矩也会相应提高,车辆将获得一定的加速度。减速行驶过程正好相反。实验时通过控制功率电位器给定,让给定功率先逐渐提高后逐渐减小,则电机输出功率也会随着时间先增加再减小。
图8 为电机输出转速变化曲线,电机转子转速呈现先升高再降低变化趋势。图9 为电机输出扭矩变化曲线,在实验过程中扭矩响应迅速,没有出现太大的波动。从图10 的逆变器输出三相电流变化曲线也可以看出,实验过程中电流波形变化平稳,没有过流、逆变器保护等现象。通过车辆先加速行驶后减速行驶工况实验可知,该控制策略能较好地完成车辆加减速要求系统运行平稳。
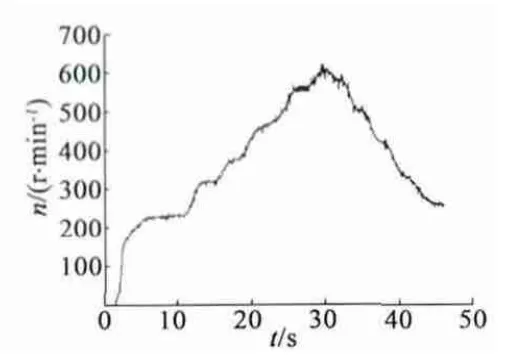
图8 电机输出转速变化曲线
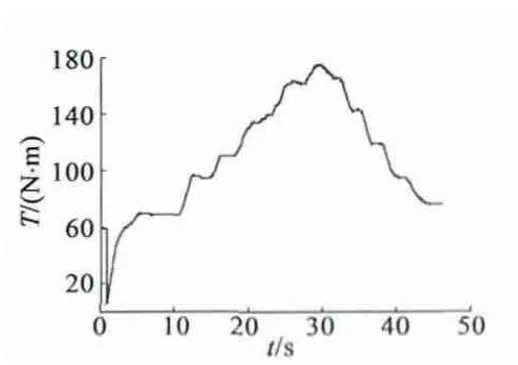
图9 电机输出扭矩变化曲线
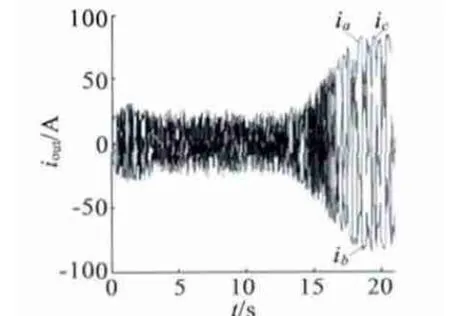
图10 电机输出扭矩变化曲线
5 结 语
本文根据车辆牵引控制,建立异步电动机物理模型,并建立了基于转子磁链的电机控制策略模型。提出了以功率为外环的系统矢量控制策略,基于Simulink 进行了交流异步电动机矢量控制算法建模与仿真。搭建了异步电动机实验平台,模拟了电机静止加速起动工况,车辆先加速行驶后减速行驶工况。结果表明,基于转子磁场定向的矢量控制可以解决矿用电动轮自卸车轮边交流牵引电机在动态运行过程中对输出扭矩实时控制的问题,能够适应负载的各种变化,该方法具有响应速度快、鲁棒性强、稳态性良好等优点。
[1] 李勇,杨耀东,马飞.矿用电动轮自卸车的概况及未来发展趋势.矿山机械[J].2010,(14):10-16.
[2] 孙博,胡顺安,周俊等.国内非公路矿用自卸车发展现状研究[J].煤矿机械,2010,31(8):15-16.
[3] 陈静,王登峰,刘彬娜.燃料电池-蓄电池-超级电容混合动力汽车控制策略[J].农业机械学报,2008,39(10):36-39.
[4] 李军伟.基于模糊自整定PID 的电动车辆驱动控制系统的研究[J].制造业自动化,2005,27(11):8-11.
[5] Baumann B M,Gregory W,Bradley G C,et al.Mechatronic design and control of hybrid electric vehicles[J].IEEE/ASME Transactions on Mechatronics,2000,5(1):58-72.
[6] Tetsuya N,Kenichiroh K,Terunao K.Evaluation of the influence of JC08-based cycle stress on batteries in plug-in hybrid electric vehicle[J].Smart Gridv,2012,3(1):483-491.
[7] 谢宝昌,任勇德.电动机的DSP 控制技术及其应用[M].北京:北京航空航天大学出版社,2005:125-235.
[8] 巫庆辉,邵诚.基于U-I 模型的感应电机定子磁链估计的仿真研究[J].系统仿真学报,2007,19(1):89-92.
