空间应用的两相混合式步进电动机伺服控制器
2014-01-13谢宝昌姚惟琳军2
葛 悦,谢宝昌,姚惟琳,苗 军2,
(1.上海交通大学,上海200240;2.上海市空间飞行器机构重点实验室,上海201108;3.上海宇航系统工程研究所,上海201108)
0 引 言
空间用电机主要分为步进电动机、直流电机、无刷直流电机、永磁同步电机等,本文根据工程应用及可靠性要求选用步进电动机。步进电动机又称脉冲电机,是数字控制系统中的一个执行元件。它能将脉冲信号转变为相应的角位移或者直线位移,就是给一个脉冲信号,电机就转动一个角度或移动一个距离。步进电动机具有低成本、结构结实耐用、容易控制、高可靠性、几乎无需维护等优点。
宇宙空间充满了各种形态的物质:有各种能量的带电粒子;有引力场、磁场和电场;有各种波长的电磁辐射。空间环境对产品设计的影响主要考虑以下两方面:高能带电粒子的辐射损伤和单粒子事件;芯片热设计满足产品长寿命工作要求。
文献[1]采用高性能DSP 作为指向机构控制系统主芯片,可是DSP 器件对单粒子敏感,无法满足空间应用可靠性要求。文献[2]采用集成的电机驱动芯片LMD18200 构成H 全桥电机驱动电路,芯片集成度高,但是驱动电流一般1 ~3 A 范围,芯片辐照指标无数据,且芯片热耗集中,大电流工作时芯片温度较高达到70℃以上,无法满足高轨卫星长寿命、高可靠度要求。
针对上述问题,本文的步进电动机伺服控制器采用FPGA +MOSFET 驱动芯片和MOSFET 组成的H 桥式驱动电路方案,以满足空间辐照指标及降低芯片工作温度的要求。基于反熔丝结构的现场可编程门阵列FPGA 为一次编程型开关元件,具有体积小、集成度高、抗辐射、抗干扰、不需外接PROM 或RPROM 的特点。MOSFET 驱动芯片IR2110 等级为宇航级,其高端侧偏置电压高(最高<500 V),响应速度快(ton=120 ns,toff=94 ns),电流驱动能力强;选用具有辐照指标的MOSFET 器件,能满足空间环境要求,并较H 桥电机驱动芯片热耗分布均匀,解决了空间散热问题,适合在航天上应用。
1 系统构架
本文针对两自由度指向机构采用两套相同的传动链和角度测量组件,均由步进电动机、谐波减速器、旋转变压器、轴承等部件组成。
两相混合式步进电动机参数如下:二相四拍;电源电压(29 ±1)V;步距角1.8°;每相额定电流0.6 A;静力矩0.15 N·m;定子绕组各相直流电阻(6 ±1)Ω。
采用多极旋转变压器作为位置传感器,其参数如下:激磁方式:转子激磁,定子输出;激磁电压(3.8 ±0.38)V、频率2 400 Hz、极对数1∶ 16;输出信号类型:正余弦;最大空载输出电压:粗机(2 ±0.2)V,精机(2 ±0.2)V。
指向机构伺服控制器采用FPGA +MOSFET 驱动芯片和MOSFET 组成的H 桥式驱动电路的硬件架构,采用基于旋转变压器的增量式位置闭环控制方法,原理框图如图1 所示。
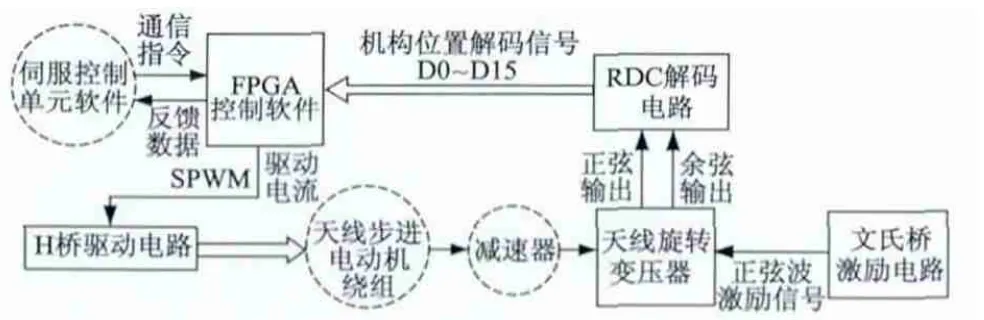
图1 卫星指向机构伺服控制器原理框图
2 系统硬件设计
指向机构伺服控制器包含控制线路和驱动线路两部分。其中,控制线路的主要功能是总线通信、指令解析、传感器采集、实现步进电动机底层控制算法、电子换相控制、控制量脉宽调制输出。
驱动线路主要功能是接收控制线路发出的斩波信号,将星载28 V 电源转化为二相四拍步进电动机绕组所需的脉冲式供电电压,实现电机驱动。
2.1 控制电路设计
控制系统选用ACTEL 公司的反熔丝系列芯片A54SX72A-CQ208B,该芯片资源有7.2 万典型门(Typical Gates),171 个I/O 口,支持5 V 供电。考虑到可调试性,本系统实验中使用一片ALTERA 公司的SRAM 架构芯片EPF10K50RI240,配置Flash存储器EPC2TC32,可多次编程。
2.2 功率驱动电路设计
IR2110 是采用自举技术以输出同一桥臂高侧与低侧信号的功率MOSFET 和IGBT 专用栅极驱动集成电路[3]。它采用HVIC 和闩锁抗干扰CMOS 制造工艺,具有独立的低端和高端输入通道;兼有光耦隔离(体积小)和电磁隔离(速度快,工作频率可达500 kHz)的优点。
功率部分采用2 片IR2110 驱动4 片MOSFET构成H 桥驱动电路,如图2 所示。IR2110 内部由三个部分组成:逻辑输入,电平平移及输出保护。逻辑电源电压范围5 ~15 V,输出端电压范围10 ~20 V。悬浮电源采用自举电路,其高端工作电压可达500 V。
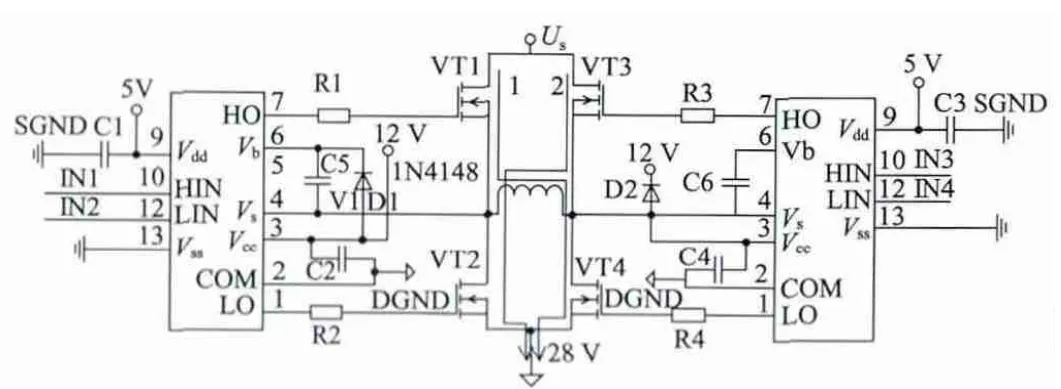
图2 功率驱动电路
图2 中,电机绕组供电电源US为28 V,逻辑输入信号端电源Vdd为5 V,C5、C6 是自举电容,D1、D2 是自举二极管,C1 ~C4 是滤波电容,VT1、VT2、VT3、VT4 为功率MOSFET。考虑到试验需要,MOSFET选用性能指标接近的2N6796 替代,其最大工作电压为100 V,最大电流为8 A,导通电阻为0.18 Ω。当IN1 =0、IN2 =1 时,U1 的LO 端产生高电平,+12V 经过D1、C5、VT2 接地,给C5 充电;当IN1 =1、IN2 =0 时,C5 正极电压经过IR2110 内部BJT、R1、VT1 回到C5 的负极,形成回路放电,VT1 导通,此时C5 相当于电压源[4-5]。VT1、VT2 与VT3、VT4 皆采用互补式输入,并且根据极性方向信号,控制MOSFET 的导通与关断,以实现绕组电流方向的控制。
采用IR2110 及MOSFET 构成的H 桥驱动电路较传统的斩波恒流电机驱动电路降低了约30%功耗;较LMD18200 等集成电机驱动芯片显著降低了芯片的工作温度,并满足空间抗辐照要求,适应空间长寿命的工作特点。
2.3 细分驱动SPWM 控制策略
本文设计的电路采用了基于SPWM 的矢量恒幅均匀旋转细分法,即分别给步进电动机的两相绕组通以正、余弦电流,使合成的电流矢量(或磁场矢量)在空间均匀旋转[2]。采用细分驱动能有效改善步进电动机运行的平稳性,减弱或消除低频振动,提高步进电动机的转动速度稳定度。
本文采用异步调制方式,以正弦阶梯波为调制波,锯齿波为载波进行比较,载波频率为23.4 kHz。软件程序设计中为避免同臂两只开关管同时导通的短路故障,设置1 μs 的开关死区Δt。
3 运动程序设计
伺服控制器的控制功能由FPGA(可编程逻辑器件)实现,采用VHDL 语言。FPGA 的综合、布局布线采用Altera 的集成开发环境QuartusⅡ8.1,功能仿真和时序仿真采用ModelSim 6.2。采用自顶至下的层次化设计方法,将主要功能模块划分为程控指令处理模块、电机驱动模块、旋转变压器读数处理模块、遥测通信模块。顶层模块完成系统与外部信号的接口定义与连接;完成系统内部各子模块之间的信号互连处理,例化各子模块;完成FPGA 器件的对外所有管脚定义和内部状态定义。控制系统总体结构原理框图如图3 所示。
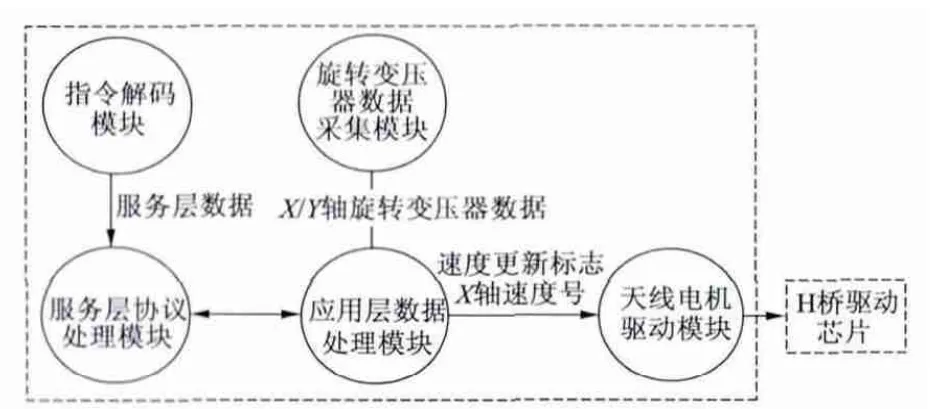
图3 FPGA 控制器功能模块结构示意图
指向机构伺服控制系统工作原理如下:用户通过16 位并行数据命令,进行电机工作模式设定,包括驱动模式、零位修正模式、归零模式和急停模式四种,模式信号送入多路开关完成模式选择。驱动模式下根据转速与步距角的关系,产生与转速相对应频率的脉冲,根据方向信号及更新的细分号,读取正/余弦表中对应的数据,并对读取的正余旋调制波数据与三角波发生器比较,输出SPWM 脉宽调制信号,从而控制两相混合式步进电动机运转。
3.1 电机驱动顶层模块
电机驱动模块包括更新模式指令模块及产生细分斩波模块。程控指令处理模块的输出是本模块的输入控制信号,根据工作模式获得速度的定时细分数和占空比,产生驱动电机的PWM 斩波信号信号。
本模块功能包含更新电机驱动参数、产生细分驱动时钟、输出正弦波细分值和输出PWM 斩波信号4 个功能。
3.2 更新速度指令模块设计
本模块根据通信处理模块产生的电机速度信号,通过查找表的方式获得该速度信号对应的电机定时细分寄存器的值和占空比值更新内部的速度值、占空比值、停转标志等;根据更新后的内部寄存器,输出相应的细分时钟、占空比、停转标志等。
本模块为步进电动机顶层模块例化使用,输出作为产生细分斩波模块的输入。
3.3 产生细分斩波模块设计
本模块根据更新速度指令模块输入的细分时钟、占空比、转动方向和停转标志,读取正/余弦表中对应的数据,并对读取的数据进行SPWM 斩波,输出SPWM 信号和SD 使能信号。本模块为步进电动机顶层模块例化使用。
正弦波采用256 点正弦表表示,且最大值设定为255,即采用8 bits 表示;SPWM 斩波采用频率23.4 kHz 的锯齿波,最大值为2 048,即采用11 bits表示;SPWM 信号输出采用寄存器同步。以A 相绕组驱动波形为例,波形仿真图如图4 所示。其中fraclk 为细分驱动信号,pwm_count 为三角载波信为余弦调制波数据表,dira 为方向信号,sinoutput 为正弦调制波数据表,cosoutput 为余弦调制波数据表,pwmphase_a[0]为VT1 管栅极输入波形,即图2 中IN1 信号,pwmphase_a[1]为VT2 管栅极输入波形,即IN2 信号,pwmphase_a[2]为VT3 管栅极输入波形,即IN3 信号,pwmphase_a[3]为VT4 管栅极输入波形,即IN4 信号。
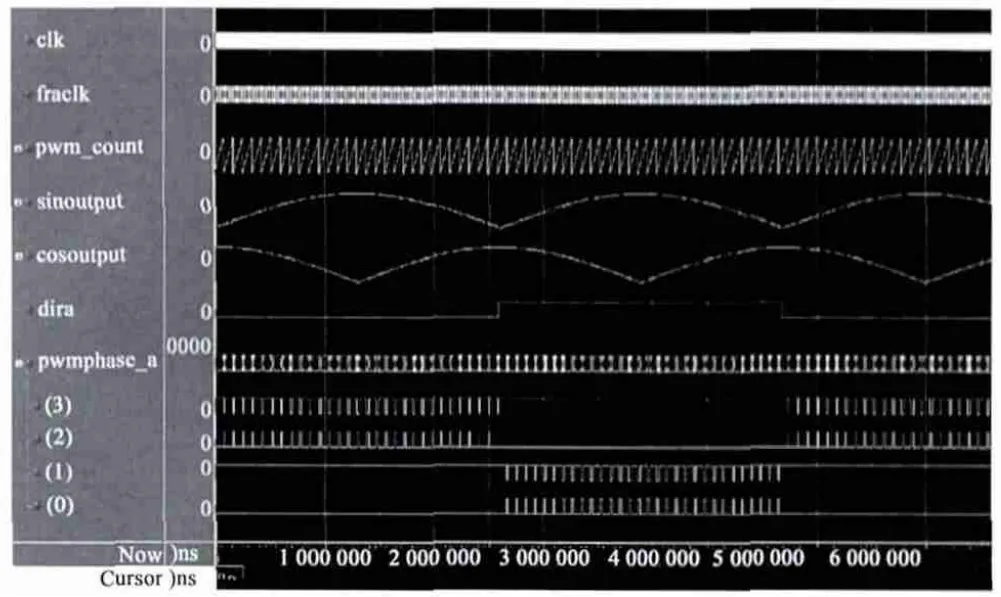
图4 电机产生细分斩波模块仿真图
3.4 读取旋转变压器数据模块设计与实现
本模块采集两个旋转变压器的数据,根据耦合方式处理旋转变压器数据,并将旋转变压器数据提供给程控指令处理模块。顶层模块通过例化本模块,实现采集位置的功能。
本文采用极对数为1∶ 16 的双通道多极旋转变压器,粗、精速比为1∶ 16,即粗通道转动1 圈,精通道将转动16 圈[6],因此粗机的第5 位应与精机的第一位对齐。
在粗精数据组合中,由于粗精机械轴的传动误差、减速器误差、传感器装配误差及双轴复合装配误差,以及R/D 转换器精度,使得粗精读数组合时,需将精机数据与粗机数据进行耦合纠错处理。本文以粗机的低2 位用于和精机的高两位进行耦合,即根据精通道的最高两位(定义为J1、J2)与精通道权值相同的粗通道的对应两位(定义为C5、C6),判断出是否要对纠错位(粗通道中权值比精通道最高位高一位的数据位)进行纠错。纠错逻辑可用下式表达:如果J1J2 =00 且C5C6 =11,则C1C2C3C4 +1;如果J1J2 =11 且C5C6 =00,则C1C2C3C4-1。最后把经过纠错的粗通道高4 位数据和精通道数据直接组合即可。数据补偿流程图如图5 所示。
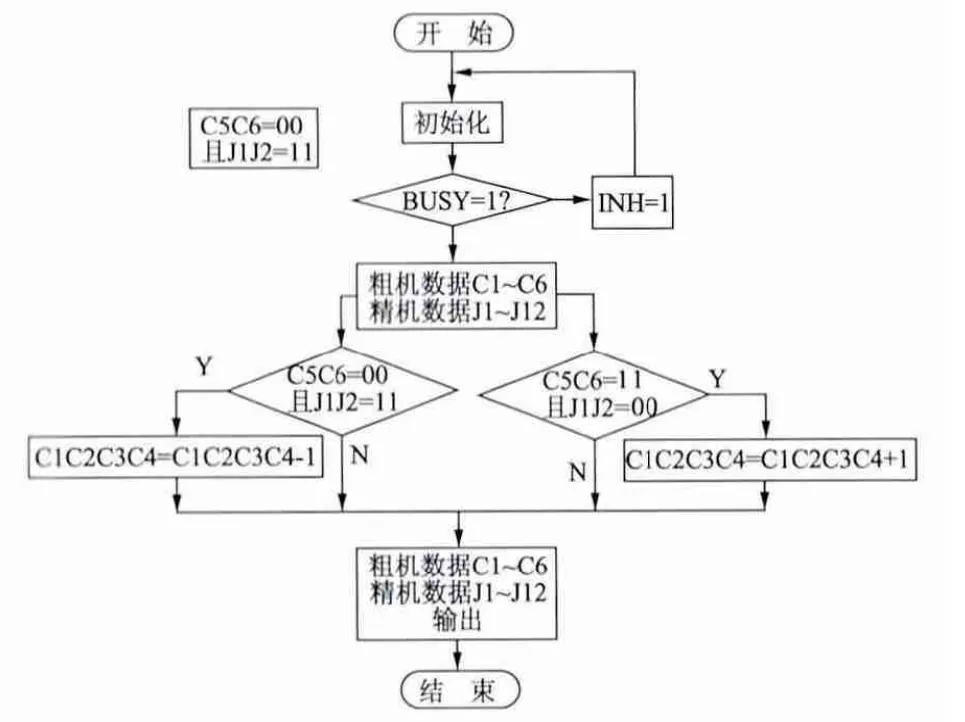
图5 粗精机数据耦合补偿图
4 试验结果
利用ROMER 公司的关节臂INFINITE 2.07 轴测量系统测试指向机构的指向精度,测试现场如图6 所示。关节臂是关节臂测量仪和便携式三坐标的一种简称。测试结果见表1 所示。试验结果表明该系统采用基于旋转变压器的增量式位置闭环控制方法,电机运转平稳,较开环控制定位精度高。
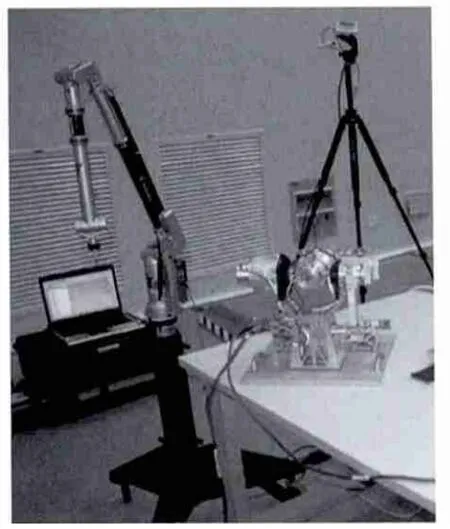
图6 指向机构精度测试

表1 指向机构指向精度测试结果
5 结 语
本文针对空间应用指向机构的两相混合式步进电动机,采用基于旋转变压器的增量式位置闭环控制方法,设计并实现了FPGA+MOSFET 驱动芯片和MOSFET 组成的H 桥式驱动电路构成的指向机构伺服控制器。同时,选用ACTEL 公司的反熔丝系列芯片A54SX72A-CQ208B 以及有辐照指标的MOSFET 适合航天抗辐照及高可靠性要求。实验结果表明,基于MOSFET 驱动芯片IR2110 构成的H 桥驱动电路,实现了细分的SPWM 控制,能够有效地构建机构驱动过程的位置闭环控制系统。该控制系统具有线路简单、定位精度高、有效降低芯片温度、性能稳定的特点,适用于航天空间辐照环境及高可靠性、长寿命的要求。
[1] 刘建章,刘刚,李光军. 永磁同步电机多开关HALL 的微步进标定方法及其矢量控制系统[J]. 微电机,2009,42(10):40-43.
[2] 蒋范明,韩昌佩.空间应用的两相混合式步进电动机细分电路设计[J].微特电机,2012,40(2):74-76.
[3] 谭建成.电机控制专用集成电路[M].北京:机械工业出版社,1997:464-473.
[4] 张纯江,张金全.带有“负偏压”的IR2110 驱动器[J]. 电力电子技术,2000(2):49-50.
[5] 赵士强,侯传教,王宽仁. 用ISP 器件和IR2110 芯片研制高压多路波形发生器[J].空军工程大学学报(自然科学版),2002(2):75-77.
