一种永磁同步电动机混合式电流控制策略
2014-01-13周扬忠
杨 凌,周扬忠
(福州大学,福建福州350108)
0 引 言
永磁同步电动机(以下简称PMSM)采用永磁体激磁,具有效率高、结构简单、体积小、损耗少等特点,近年来在工业领域中得到了广泛的应用。目前,在采用矢量控制的PMSM 驱动系统中,绝大多数系统采用d、q 轴电流闭环作为内环,d、q 轴电流控制性能直接影响着驱动系统的性能。传统的PMSM驱动系统通常采用由比例积分(PI)控制器构成的d、q 轴电流闭环;PI 控制器虽然控制简单,易于实现,但是也会产生例如超调、暂时性的输出电压饱和等问题。
为此,很多学者提出了许多优化和改进型电流控制策略。例如文献[1]对PI 控制器的参数、零点漂移和反电动势等主要影响电流环的因素进行分析,并对其影响趋势进行总结,同时提出了一些优化方法。文献[2]提出了一种智能PI 控制器,这种控制器能够根据系统运行状态动态地改变PI 控制器的结构和参数,能够有效地改善调速系统的动态性能。文献[3]将智能PI 控制器应用到电流环中,相对于传统PI 控制器,新系统的动态性能有明显的提高。文献[4]利用带遗忘因子的最小二乘法对电机参数进行在线辨识,从而使得电流环PI 参数跟随电机参数实时调整,能够有效地解决系统因电机参数变化而导致的系统性能降低问题。
虽然电流环PI 控制器的优化与改进研究取得了一定的成果,但是PI 控制器是对d、q 轴电流分别进行调节,没有对d、q 轴电流进行综合考虑,这就使得PI 控制器不能够保证将直流电压最优地分配到d、q 轴上,所以若想进一步的提高电机动态性能,就必须从综合考虑d、q 轴方面入手。电流环时间最优控制器利用时间最优控制(以下简称TOC)理论,推导出最优开关曲线,通过输入的d、q 轴电流误差,在开关曲线中选出对应的输出d、q 轴控制电压,从而使d、q 轴电流以最短时间收敛到给定值。但在实际实验中,受DSP 芯片运算速度的限制,对于电感值较小的PMSM,TOC 控制会产生稳态脉动过大的问题。因此本文提出并研究了一种TOC-PI 混合式控制器,仿真及实验结果表明,该控制器结合了TOC 与PI 控制器各自的优点,拥有更好的动态与稳态性能。
1 电流环时间最优控制器设计
根据PMSM 的d、q 轴数学模型,可得d、q 轴电流状态方程如下:
式中:Rs为定子电阻;Ls为定子电感;ωe为转子电角速度;ψf为永磁体磁链;isd、isq为d、q 轴定子电流;usd、usq为d、q 轴定子电压。

设初始0 时刻时,d、q 轴电流为x(0)=[isd0isq0]T,经过时间tf后,达到给定稳态值x(tf)= [isd(tf) isq(tf)]T,稳定后,则稳态时电压u(tf)如下:

状态误差xe=[isdeisqe]T定义如下:

则电流误差状态空间:

其中控制电压误差ue=[uedueq]T定义如下:
若能根据d、q 轴电流控制需要求出ue,则:
进一步可以求出端电压,如下:
本文中d、q 轴电流时间最优控制是指:找到一种控制电压ue使得d、q 轴电流误差xe由任意初始值在最短时间tf内收敛到零状态,具体d、q 轴电流时间最优控制器设计分析如下。
本文线性非时变系统的时间最优控制问题的提法如下:
若令Hamilton 函数H:

式中:λ=[λdλq]T。则泛函数极值存在的必要条件:
由H 全局最小可得:

即:
由式(12)可以求出:


显然λ 是一个发散型指数振荡函数,因此直接根据式(13)求u*e 较困难,所以本文采用开关控制方法来求得
根据文献[8]中最大值原理,推导出d、q 轴电流误差 最优控制开关曲线,如图1 中粗实线所示。由电流误差构成的直角坐标系isde和isqe逆时针旋转φ=arctan后,变成直角坐标系isx和isy。四个过坐标原点的基本圆的圆心O1~O4坐标分别如图1 所示。将基本圆O4沿isx轴正方向依次平移后,各圆周处于isx下方的弧段即构成isx>0 段的开关线1;将基本圆O3沿isy轴正方向依次平移后,各圆周处于isy右方的弧段即构成isy>0 段的开关线2;同理可得开关线3 和开关线4。
根据d、q 电流误差isde、isqe,基于开关曲线可直接确定出式(8)控制电压误差ue给定。方法如下:当电流误差矢量位于开关线1 和开关线2 之间,选择= [-U0-U0]T;当电流误差矢量位于开关线1 和开关线4 之间,选择= [-U0U0]T;当电流误差矢量位于开关线3 和开关线4 之间,选择= [U0U0]T;当电流误差矢量位于开关线2 和开关线3 之间,选择= [U0-U0]T。在确定出ue的给定值后,将代入式(8)中即可求得电流环时间最优控制器输出的d、q 轴电压给定
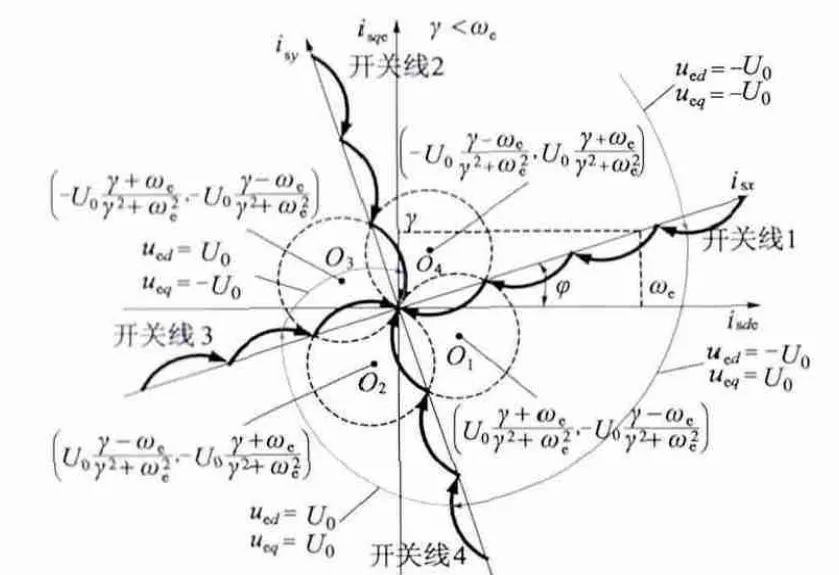
图1 TOC 开关曲线
2 TOC-PI 混合式电流控制器设计
上述的TOC 控制是基于连续形式进行推导,但实际控制是一个离散形式,因此在实验中会产生d、q 轴电流脉动。当电机电感较小时,脉动更大,不利于电流的平稳控制。而PI 控制器具有较好的稳态控制性能,所以本文将TOC 控制与PI 控制相结合,在动态过程中TOC 控制占主导作用,稳态时PI 控制占主导作用,从而改善电流控制稳态性能。
为了避免两种控制方案在切换时产生电流控制振荡,TOC 控制与PI 控制之间采用模糊切换模式。将q 轴电流误差isqe作为模糊开关的判断条件,ea和eb为切换阈值,TOC-PI 混合式控制器分为三个阶段:当>ea时,采用TOC 控制,定子控制电压最大,以便最短时间内将电流误差缩小到一定范围;当ea>>eb时,采用TOC-PI 混合式控制,减少控制量,防止过大的超调,并且进一步缩小电流误差范围;当eb>时,采用PI 控制,在误差范围很小的情况下,进行精确跟踪,提高系统电流控制的稳态性能。
由模糊控制理论可得控制器在t 时刻的输出:

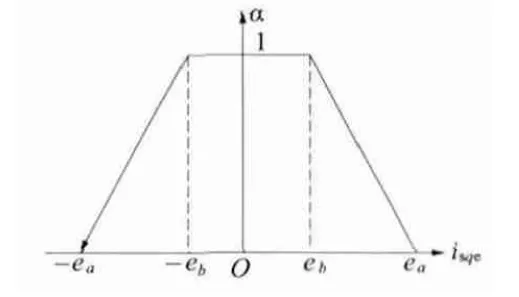
图2 线性隶属度函数
所提出的混合式电流控制器的结构框图如图3所示。
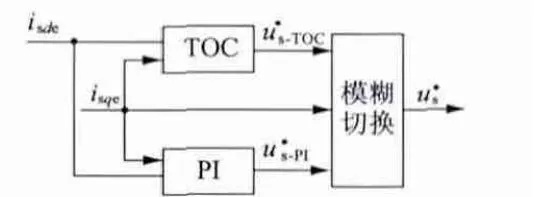
图3 本文的TOC-PI 混合式控制器结构框图
3 仿真及实验研究
根据上述TOC-PI 混合式电流控制器设计分析,构建PMSM 矢量控制系统d、q 轴电流闭环控制结构框图,如图4 所示。TOC-PI 控制器根据输入的d、q 轴电流期望值和实际值输出d、q轴定子电压给定值,再经过空间电压矢量调制生成相应的脉冲,控制逆变器开关,对d、q 轴电流进行闭环控制。其中d 轴电流给定为0。
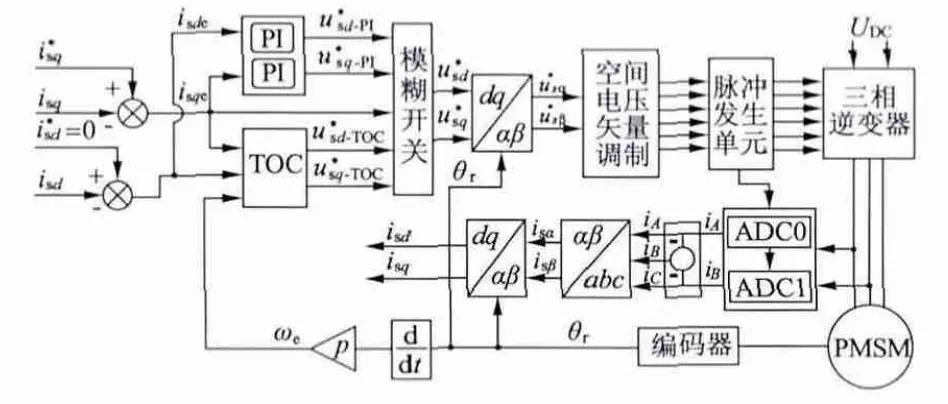
图4 PMSM 矢量控制系统的d、q 轴电流环
仿真及实验中所采用的PMSM 电机参数如表1所示。
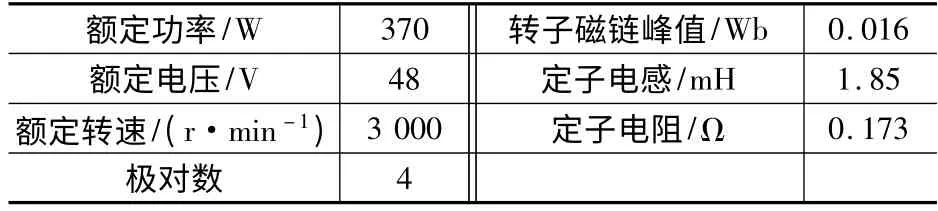
表1 PMSM 参数
3.1 仿真结果分析
为了检验新型TOC-PI 电流控制器对电流控制性能,对q 轴电流做±8.0 A 的阶跃响应,结果如图5 所示。同时为了对比方便,图5 中还给出了PI控制器、TOC 控制器单独作用仿真结果。通过对比可见,PI 控制器q 轴电流有较大的超调,且达到稳态时间较长,稳态脉动较小;TOC 控制器q 轴电流响应较快,并且几乎没有超调,但稳态脉动较大;而本文提出的TOC-PI 控制器q 轴电流结合了PI 和TOC 各自的优点,有较好的动态与稳态控制性能。
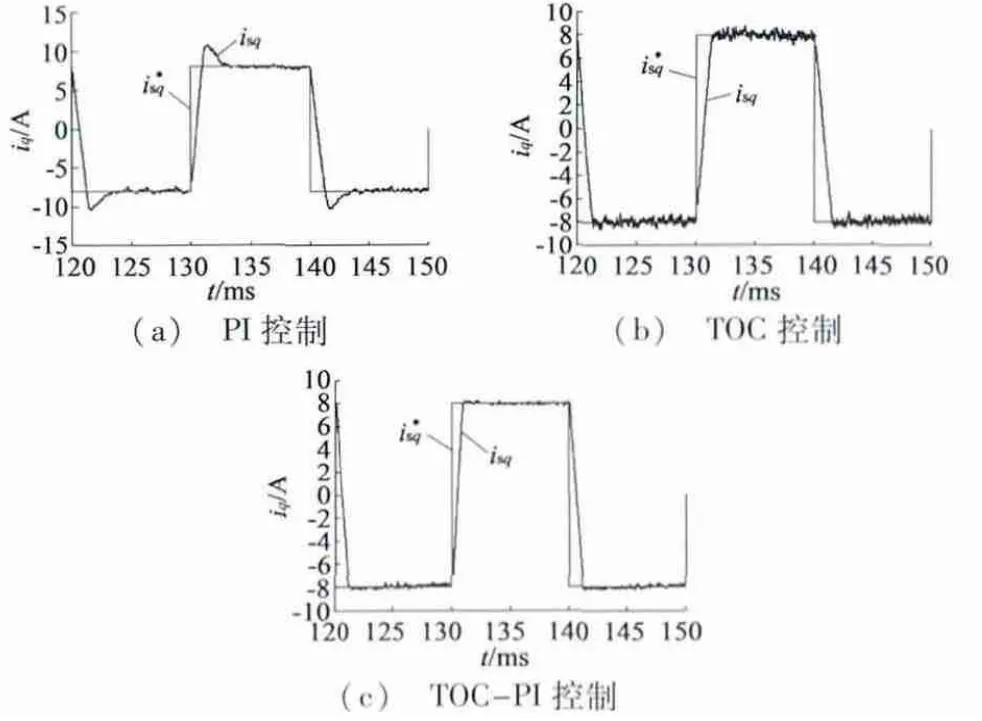
图5 PI、TOC 与TOC-PI 控制d、q 轴电流响应仿真结果
3.2 实验结果分析
实验中采用以TMS320F2808 DSP 为核心的全数字PMSM 控制平台,控制周期为70 μs。q 轴给定电流为±6.0 A 的阶跃响应信号,PI 与TOC-PI 所选取的比例积分系数一致,其中比例系数为0.6、积分系数为0.12、q 轴给定电流为±6.0 A 的阶跃响应实验结果如图6 所示。由图6 实验结果可见,采用PI 控制的q 轴电流有明显的超调;采用TOC 控制器的电流响应存在很大的稳态脉动,原因主要是:1)电机电感值太小;2)所采用的DSP 芯片运算速度较慢,控制周期较长;而采用本文提出的TOC-PI控制的q 轴电流没有超调,动态过渡过程较短,跟随效果最好,稳态脉动也很小,将TOC 与PI 各自的优点有效地结合在了一起。
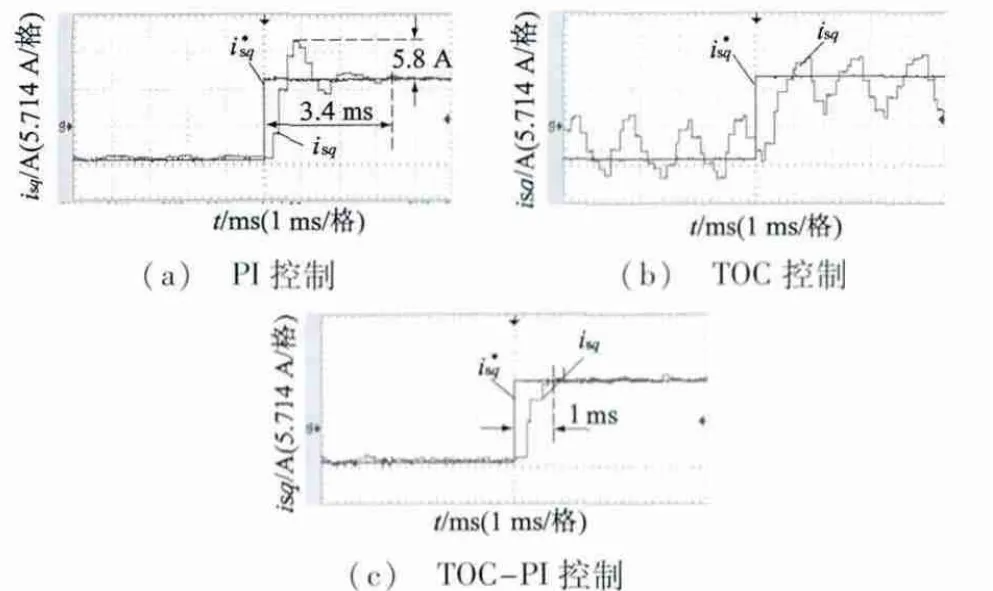
图6 PI、TOC 与TOC-PI 控制d、q 轴电流响应实验结果
4 结 语
本文提出并分析了一种能够快速而平稳控制PMSM 电流的TOC-PI 混合式控制策略,仿真与实验结果表明:
(1)PI 控制需要选取合适的比例积分系数,否则就会产生超调等问题,但实际过程中很难保证选取的系数适用于所有情况。
(2)TOC 控制需要快速的控制硬件与之配合才能达到应有的控制效果,但受实际数字控制硬件性能的限制,系统控制周期较长,同时PMSM 电机电感又较小,因此采用TOC 控制并不能保证电流误差完全按照开关曲线运行,于是电流控制产生较大的脉动。
(3)TOC-PI 混合式控制既有TOC 控制动态响应快、无超调的特点,也有PI 控制稳态效果好的优点,并且受比例积分系数影响小。实验结果证明了这种控制策略拥有比PI 与TOC 控制更好的跟随效果。
[1] 刘军,敖然,韩海云,等. 永磁同步电动机伺服系统电流环优化设计[J].微特电机,2012(6):17-19.
[2] 阮毅,徐静,陈伯时. 智能PI 控制在交流调速系统中的应用[J].电工技术学报,2005,20(3):83-87.
[3] 张伦健,陈利萍. 基于智能PI 的永磁同步电动机近似最大转矩电流比控制[J].微特电机,2012(8):47-50.
[4] 杨立永,张云龙,陈智刚,等. 基于参数辨识的PMSM 电流环在线自适应控制方法[J].电工技术学报,2012(3):92-97.
[5] Mongkol Konghirun,Longya Xu. A fast transient-current control strategy in sensorless vector-controlled permanent magnet synchronous motor [J]. IEEE Transactions on Power Electronics,2006,21(5):1508-1512.
[6] 刘红波,李少远,柴天佑.一种基于模糊切换的模糊复合控制器及其应用[J].控制与决策,2003,18(5):104-107.
[7] 孟琚遐,王渝,王向周.Bang-Bang +Fuzzy-PI 自适应控制器的应用研究[J].机床与液压,2008,36(5):276-280.
[8] 吴受章. 最优控制理论与应用[M]. 北京:机械工业出版社,2011.
